DP Intro - OBST
http://radford.edu/~nokie/classes/360/dp-opt-bst.html
Overview
Optimal Binary Search Trees - Problem
- Problem:
- Sorted set of keys k1,k2,...,knk1,k2,...,kn
- Key probabilities: p1,p2,...,pnp1,p2,...,pn
- What tree structure has lowest expected cost?
- Cost of searching for node ii
: cost(ki)=depth(ki)+1cost(ki)=depth(ki)+1
Expected Cost of tree =∑i=1ncost(ki)pi=∑i=1n(depth(ki)+1)pi=∑i=1ndepth(ki)pi+∑i=1npi=(∑i=1ndepth(ki)pi)+1Expected Cost of tree =∑i=1ncost(ki)pi=∑i=1n(depth(ki)+1)pi=∑i=1ndepth(ki)pi+∑i=1npi=(∑i=1ndepth(ki)pi)+1
Optimal BST - Example
- Example:
- Probability table (pipi
is the probabilty of key kiki
:
| ii | 1 | 2 | 3 | 4 | 5 |
| kiki | k1k1 | k2k2 | k3k3 | k4k4 | k5k5 |
| pipi | 0.25 | 0.20 | 0.05 | 0.20 | 0.30 |

- Given: k1<k2<k3<k4<k5k1<k2<k3<k4<k5
- Two BSTs
- Tree 1:
- k2/[k1,k4]/[nil,nil],[k3,k5]k2/[k1,k4]/[nil,nil],[k3,k5]
- cost = 0(0.20) + 1(0.25+0.20) +2(0.05+0.30) + 1 = 1.15 + 1
- Tree 2:
- k2/[k1,k5]/[nil,nil],[k4,nil]/[nil,nil],[nil,nil],[k3,nil],[nil,nil]k2/[k1,k5]/[nil,nil],[k4,nil]/[nil,nil],[nil,nil],[k3,nil],[nil,nil]
- cost = 0(0.20) + 1(0.25+0.30) +2(0.20) + 3(0.05) + 1 = 1.10 + 1
- Notice that a deeper tree has expected lower cost
Optimal BST - DP Approach
- Optimal BST TT
must have subtree T′T′
for keys ki…kjki…kj
which is optimal for those keys
- Cut and paste proof: if T′T′
not optimal, improving it will improve TT
, a contradiction
- Algorithm for finding optimal tree for sorted, distinct keys ki…kjki…kj
:
- For each possible root krkr
for i≤r≤ji≤r≤j
- Make optimal subtree for ki,…,kr−1ki,…,kr−1
- Make optimal subtree for kr+1,…,kjkr+1,…,kj
- Select root that gives best total tree
- Formula: e(i,j)e(i,j)
= expected number of comparisons for optimal tree for keys ki…kjki…kj
e(i,j)={0, if i=j+1mini≤r≤j{e(i,r−1)+e(r+1,j)+w(i,j)}, if i≤je(i,j)={0, if i=j+1mini≤r≤j{e(i,r−1)+e(r+1,j)+w(i,j)}, if i≤j
- where w(i,j)=∑k=ijpiw(i,j)=∑k=ijpi
is the increase in cost if ki…kjki…kj
is a subtree of a node
- Work bottom up and remember solution
Optimal BST - Algorithm and Performance
- Brute Force: try all tree configurations
- Ω(4n / n3/2) different BSTs with n nodes
- DP: bottom up with table: for all possible contiguous sequences of keys and all possible roots, compute optimal subtrees
for size in 1 .. n loop -- All sizes of sequences
for i in 1 .. n-size+1 loop -- All starting points of sequences
j := i + size - 1
e(i, j) := float'max;
for r in i .. j loop -- All roots of sequence ki .. kj
t := e(i, r-1) + e(r+1, j) + w(i, j)
if t < e(i, j) then
e(i, j) := t
root(i, j) := r
end if
end loop
end loop
end loop
- Θ(n3)
- Can, of course, also use (memoized) recursion
http://www.geeksforgeeks.org/dynamic-programming-set-24-optimal-binary-search-tree/
Dynamic Programming | Set 24 (Optimal Binary Search Tree)
Given a sorted array keys[0.. n-1] of search keys and an array freq[0.. n-1] of frequency counts, where freq[i] is the number of searches to keys[i]. Construct a binary search tree of all keys such that the total cost of all the searches is as small as possible.
Let us first define the cost of a BST. The cost of a BST node is level of that node multiplied by its frequency. Level of root is 1.
Example 1
Input: keys[] = {10, 12}, freq[] = {34, 50}
There can be following two possible BSTs
10 12
\ /
12 10
I II
Frequency of searches of 10 and 12 are 34 and 50 respectively.
The cost of tree I is 34*1 + 50*2 = 134
The cost of tree II is 50*1 + 34*2 = 118 Example 2
Input: keys[] = {10, 12, 20}, freq[] = {34, 8, 50}
There can be following possible BSTs
10 12 20 10 20
\ / \ / \ /
12 10 20 12 20 10
\ / / \
20 10 12 12
I II III IV V
Among all possible BSTs, cost of the fifth BST is minimum.
Cost of the fifth BST is 1*50 + 2*34 + 3*8 = 142
1) Optimal Substructure:
The optimal cost for freq[i..j] can be recursively calculated using following formula.
We need to calculate optCost(0, n-1) to find the result.
The idea of above formula is simple, we one by one try all nodes as root (r varies from i to j in second term). When we make rth node as root, we recursively calculate optimal cost from i to r-1 and r+1 to j.
We add sum of frequencies from i to j (see first term in the above formula), this is added because every search will go through root and one comparison will be done for every search.
2) Overlapping Subproblems
Following is recursive implementation that simply follows the recursive structure mentioned above.
// A naive recursive implementation of optimal binary search tree problem
#include <stdio.h>
#include <limits.h> // A utility function to get sum of array elements freq[i] to freq[j]
int sum(int freq[], int i, int j); // A recursive function to calculate cost of optimal binary search tree
int optCost(int freq[], int i, int j)
{
// Base cases
if (j < i) // If there are no elements in this subarray
return 0;
if (j == i) // If there is one element in this subarray
return freq[i]; // Get sum of freq[i], freq[i+1], ... freq[j]
int fsum = sum(freq, i, j); // Initialize minimum value
int min = INT_MAX; // One by one consider all elements as root and recursively find cost
// of the BST, compare the cost with min and update min if needed
for (int r = i; r <= j; ++r)
{
int cost = optCost(freq, i, r-1) + optCost(freq, r+1, j);
if (cost < min)
min = cost;
} // Return minimum value
return min + fsum;
} // The main function that calculates minimum cost of a Binary Search Tree.
// It mainly uses optCost() to find the optimal cost.
int optimalSearchTree(int keys[], int freq[], int n)
{
// Here array keys[] is assumed to be sorted in increasing order.
// If keys[] is not sorted, then add code to sort keys, and rearrange
// freq[] accordingly.
return optCost(freq, 0, n-1);
} // A utility function to get sum of array elements freq[i] to freq[j]
int sum(int freq[], int i, int j)
{
int s = 0;
for (int k = i; k <=j; k++)
s += freq[k];
return s;
} // Driver program to test above functions
int main()
{
int keys[] = {10, 12, 20};
int freq[] = {34, 8, 50};
int n = sizeof(keys)/sizeof(keys[0]);
printf("Cost of Optimal BST is %d ", optimalSearchTree(keys, freq, n));
return 0;
}
Output:
Cost of Optimal BST is 142
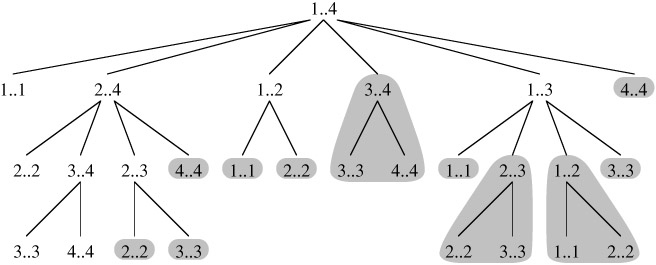
Time complexity of the above naive recursive approach is exponential. It should be noted that the above function computes the same subproblems again and again. We can see many subproblems being repeated in the following recursion tree for freq[1..4].
Since same suproblems are called again, this problem has Overlapping Subprolems property. So optimal BST problem has both properties (see thisand this) of a dynamic programming problem. Like other typical Dynamic Programming(DP) problems, recomputations of same subproblems can be avoided by constructing a temporary array cost[][] in bottom up manner.
Dynamic Programming Solution
Following is C/C++ implementation for optimal BST problem using Dynamic Programming. We use an auxiliary array cost[n][n] to store the solutions of subproblems. cost[0][n-1] will hold the final result. The challenge in implementation is, all diagonal values must be filled first, then the values which lie on the line just above the diagonal. In other words, we must first fill all cost[i][i] values, then all cost[i][i+1] values, then all cost[i][i+2] values. So how to fill the 2D array in such manner> The idea used in the implementation is same as Matrix Chain Multiplication problem, we use a variable ‘L’ for chain length and increment ‘L’, one by one. We calculate column number ‘j’ using the values of ‘i’ and ‘L’.
// Dynamic Programming code for Optimal Binary Search Tree Problem
#include <stdio.h>
#include <limits.h> // A utility function to get sum of array elements freq[i] to freq[j]
int sum(int freq[], int i, int j); /* A Dynamic Programming based function that calculates minimum cost of
a Binary Search Tree. */
int optimalSearchTree(int keys[], int freq[], int n)
{
/* Create an auxiliary 2D matrix to store results of subproblems */
int cost[n][n]; /* cost[i][j] = Optimal cost of binary search tree that can be
formed from keys[i] to keys[j].
cost[0][n-1] will store the resultant cost */ // For a single key, cost is equal to frequency of the key
for (int i = 0; i < n; i++)
cost[i][i] = freq[i]; // Now we need to consider chains of length 2, 3, ... .
// L is chain length.
for (int L=2; L<=n; L++)
{
// i is row number in cost[][]
for (int i=0; i<=n-L+1; i++)
{
// Get column number j from row number i and chain length L
int j = i+L-1;
cost[i][j] = INT_MAX; // Try making all keys in interval keys[i..j] as root
for (int r=i; r<=j; r++)
{
// c = cost when keys[r] becomes root of this subtree
int c = ((r > i)? cost[i][r-1]:0) +
((r < j)? cost[r+1][j]:0) +
sum(freq, i, j);
if (c < cost[i][j])
cost[i][j] = c;
}
}
}
return cost[0][n-1];
} // A utility function to get sum of array elements freq[i] to freq[j]
int sum(int freq[], int i, int j)
{
int s = 0;
for (int k = i; k <=j; k++)
s += freq[k];
return s;
} // Driver program to test above functions
int main()
{
int keys[] = {10, 12, 20};
int freq[] = {34, 8, 50};
int n = sizeof(keys)/sizeof(keys[0]);
printf("Cost of Optimal BST is %d ", optimalSearchTree(keys, freq, n));
return 0;
}
Output:
Cost of Optimal BST is 142
Notes
1) The time complexity of the above solution is O(n^4). The time complexity can be easily reduced to O(n^3) by pre-calculating sum of frequencies instead of calling sum() again and again.
2) In the above solutions, we have computed optimal cost only. The solutions can be easily modified to store the structure of BSTs also. We can create another auxiliary array of size n to store the structure of tree. All we need to do is, store the chosen ‘r’ in the innermost loop.
Please write comments if you find anything incorrect, or you want to share more information about the topic discussed above.
DP Intro - OBST的更多相关文章
- DP Intro - poj 2342 Anniversary party
今天开始做老师给的专辑,打开DP专辑 A题 Rebuilding Roads 直接不会了,发现是树形DP,百度了下了该题,看了老半天看不懂,想死的冲动都有了~~~~ 最后百度了下,树形DP入门,找到了 ...
- DP Intro - poj 1947 Rebuilding Roads
算法: dp[i][j]表示以i为根的子树要变成有j个节点的状态需要减掉的边数. 考虑状态转移的时候不考虑i的父亲节点,就当不存在.最后统计最少减去边数的 时候+1. 考虑一个节点时,有两种选择,要么 ...
- DP Intro - poj 1947 Rebuilding Roads(树形DP)
版权声明:本文为博主原创文章,未经博主允许不得转载. Rebuilding Roads Time Limit: 1000MS Memory Limit: 30000K Total Submissi ...
- DP Intro - Tree DP Examples
因为上次比赛sb地把一道树形dp当费用流做了,受了点刺激,用一天时间稍微搞一下树形DP,今后再好好搞一下) 基于背包原理的树形DP poj 1947 Rebuilding Roads 题意:给你一棵树 ...
- DP Intro - Tree POJ2342 Anniversary party
POJ 2342 Anniversary party (树形dp 入门题) Anniversary party Time Limit: 1000MS Memory Limit: 65536K To ...
- DP Intro - Tree DP
二叉苹果树 题目 有一棵苹果树,如果树枝有分叉,一定是分2叉(就是说没有只有1个儿子的结点) 这棵树共有N个结点(叶子点或者树枝分叉点),编号为1-N,树根编号一定是1. 我们用一根树枝两端连接的结点 ...
- BZOJ 1911: [Apio2010]特别行动队 [斜率优化DP]
1911: [Apio2010]特别行动队 Time Limit: 4 Sec Memory Limit: 64 MBSubmit: 4142 Solved: 1964[Submit][Statu ...
- 2013 Asia Changsha Regional Contest---Josephina and RPG(DP)
题目链接 http://acm.hdu.edu.cn/showproblem.php?pid=4800 Problem Description A role-playing game (RPG and ...
- AEAI DP V3.7.0 发布,开源综合应用开发平台
1 升级说明 AEAI DP 3.7版本是AEAI DP一个里程碑版本,基于JDK1.7开发,在本版本中新增支持Rest服务开发机制(默认支持WebService服务开发机制),且支持WS服务.RS ...
随机推荐
- vmware10安装Arch
必须保证机器能够上网! 1.vmware10中创建虚拟机(跟虚拟机中安装其他系统同样的操作). 2.开启上一步中创建的虚拟机. 3选择第一项进入 4自动进入root命令行 5进入 /dev (进行分区 ...
- LibreOJ 6001 太空飞行计划(最大流)
题解:首先源点向每个实验建边,流量为经费的值,实验向器材建边,值为无限大,器材向终点建边,值为价值 然后跑一遍最大流就能跑出所谓的最大闭合图的点值之和. 代码如下: #include<queue ...
- jQuery bind() live()
<script type="text/javascript"> $(document).ready(function () { /*$('.clickme').live ...
- if 判断
语法一: if 条件: #条件成立时执行的字代码块 代码1 代码2 代码3 示例: sex='female' age=18 is_beautiful=True if sex == 'female' a ...
- C# 可变参数
class Program { static void Main(string[] args) { //常规使用方法 Console.WriteLine(Add(, , , , , , , , })) ...
- html5 video微信浏览器视频不能自动播放
html5 video微信浏览器视频不能自动播放 一.微信浏览器(x5内核): 1.不能自动播放 2.全屏 3.最顶层(z层的最顶层) 二.ios系统解决方案:(无phone手机未测试) <au ...
- 【大数据之数据仓库】HAWQ versus GreenPlum
谈到GreenPlum,肯定会有同事说HAWQ!是的,在本系列第一篇选型流水记里,也有提到.因为对HAWQ接触有限,没有深入具体了解,所以很多信息都是来自于博文,人云亦云,我把看过的资料简要整理,希望 ...
- Delphi XE8中开发DataSnap程序常见问题和解决方法 (三)用TClientDataSet的“ProviderName”属性连接服务器时,无法找到服务器端的“DatasetProvier”
当我们在客户端用TClientDataSet的“ProviderName”属性连接服务器时,无法找到服务器端的“DatasetProvier”!! 问题原因:服务器端对提供服务的控件所属单元选择错误. ...
- 解决双击dwg文件ARX自定义实体提示代理的问题
双击dwg文件的时候,如果没有通过注册表设置会提示代理实体. 注册表自动加载arx 注册表参考路径 R18.1 是cad版本 ACAD-9001:409 是cad的地区语言,409是英文 ,804是中 ...
- Udp -内部缓冲区
1.每个socket关联了两个缓冲区,一个用于发送,一个用于接收. 2. 3.发送:(1)sendto()把数据放在sendbuf(缓冲区),通知os来取 (2)os在适当的时候过来取数据,并发到网络 ...