opencv 5 图像转换(2 霍夫变换)
霍夫线变换

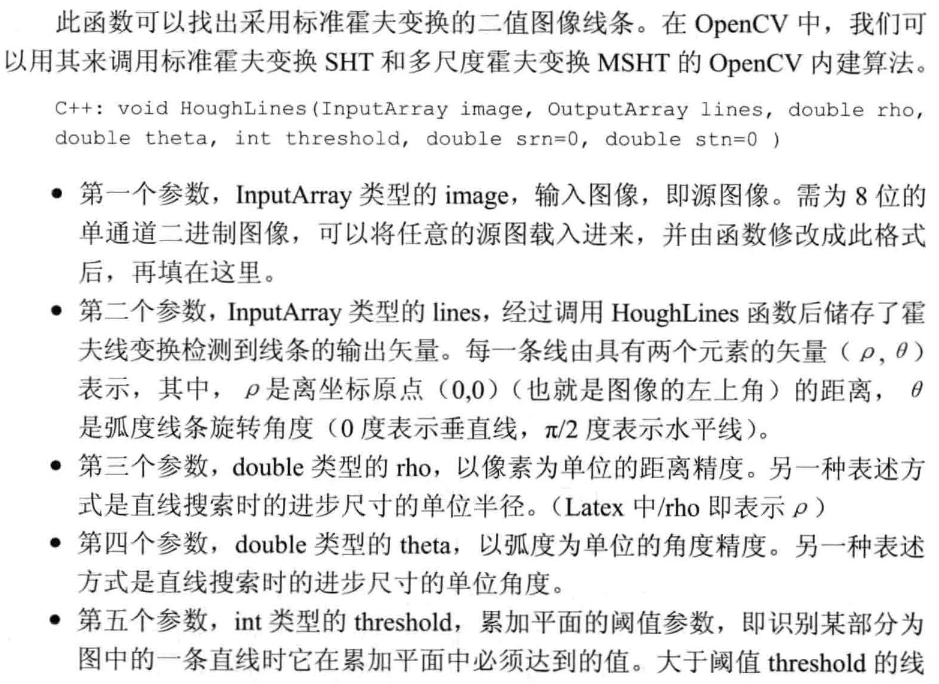
标准霍夫变换和多尺度霍夫变换(HoughLines()函数)

实例:
#include <opencv2/opencv.hpp>
#include <opencv2/imgproc/imgproc.hpp>
using namespace cv;
using namespace std;
//-----------------------------------【main( )函数】--------------------------------------------
// 描述:控制台应用程序的入口函数,我们的程序从这里开始
//-----------------------------------------------------------------------------------------------
int main()
{
//【1】载入原始图和Mat变量定义
Mat srcImage = imread("1.jpg"); //工程目录下应该有一张名为1.jpg的素材图
Mat midImage, dstImage;//临时变量和目标图的定义
//【2】进行边缘检测和转化为灰度图
Canny(srcImage, midImage, 50, 200, 3);//进行一此canny边缘检测
//imshow("canny", midImage);
cvtColor(midImage, dstImage, COLOR_GRAY2BGR);//转化边缘检测后的图为灰度图
//【3】进行霍夫线变换
vector<Vec2f> lines;//定义一个矢量结构lines用于存放得到的线段矢量集合
HoughLines(midImage, lines, 1, CV_PI / 180, 150, 0, 0);
//【4】依次在图中绘制出每条线段
for (size_t i = 0; i < lines.size(); i++)
{
float rho = lines[i][0], theta = lines[i][1];
Point pt1, pt2;
double a = cos(theta), b = sin(theta);
double x0 = a * rho, y0 = b * rho;
pt1.x = cvRound(x0 + 1000 * (-b));
pt1.y = cvRound(y0 + 1000 * (a));
pt2.x = cvRound(x0 - 1000 * (-b));
pt2.y = cvRound(y0 - 1000 * (a));
//此句代码的OpenCV2版为:
//line( dstImage, pt1, pt2, Scalar(55,100,195), 1, CV_AA);
//此句代码的OpenCV3版为:
line(dstImage, pt1, pt2, Scalar(55, 100, 195), 1, LINE_AA);
}
//【5】显示原始图
imshow("【原始图】", srcImage);
//【6】边缘检测后的图
imshow("【边缘检测后的图】", midImage);
//【7】显示效果图
imshow("【效果图】", dstImage);
waitKey(0);
return 0;
}

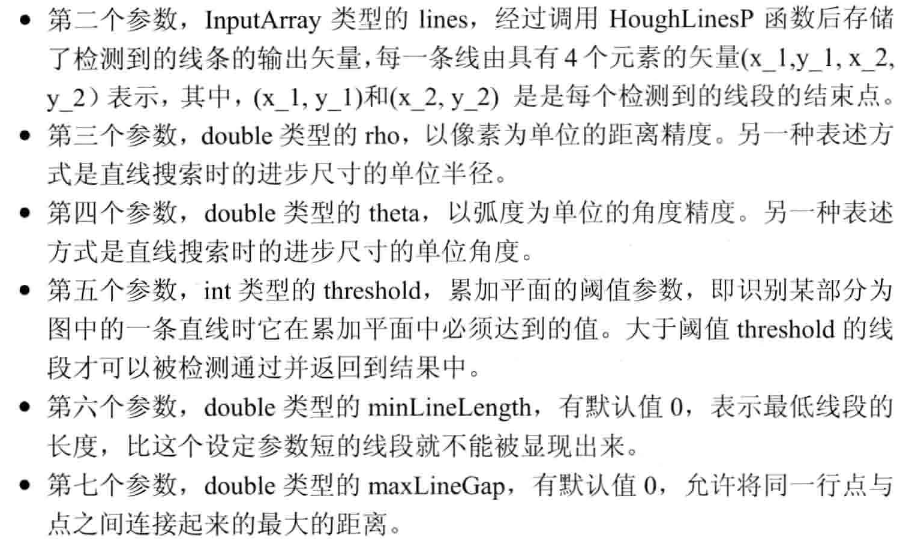
累计概率霍夫变换(HoughLinesP())

实例
#include <opencv2/opencv.hpp>
#include <opencv2/imgproc/imgproc.hpp>
using namespace cv;
using namespace std;
//-----------------------------------【main( )函数】--------------------------------------------
// 描述:控制台应用程序的入口函数,我们的程序从这里开始
//-------------------------------------------------------------------------------------------------
int main()
{
//【1】载入原始图和Mat变量定义
Mat srcImage = imread("1.jpg"); //工程目录下应该有一张名为1.jpg的素材图
Mat midImage, dstImage;//临时变量和目标图的定义
//【2】进行边缘检测和转化为灰度图
Canny(srcImage, midImage, 50, 200, 3);//进行一此canny边缘检测
cvtColor(midImage, dstImage, COLOR_GRAY2BGR);//转化边缘检测后的图为灰度图
//【3】进行霍夫线变换
vector<Vec4i> lines;//定义一个矢量结构lines用于存放得到的线段矢量集合
HoughLinesP(midImage, lines, 1, CV_PI / 180, 80, 50, 10);
//【4】依次在图中绘制出每条线段
for (size_t i = 0; i < lines.size(); i++)
{
Vec4i l = lines[i];
//此句代码的OpenCV2版为:
//line( dstImage, Point(l[0], l[1]), Point(l[2], l[3]), Scalar(186,88,255), 1, CV_AA);
//此句代码的OpenCV3版为:
line(dstImage, Point(l[0], l[1]), Point(l[2], l[3]), Scalar(186, 88, 255), 1, LINE_AA);
}
//【5】显示原始图
imshow("【原始图】", srcImage);
//【6】边缘检测后的图
imshow("【边缘检测后的图】", midImage);
//【7】显示效果图
imshow("累计概率霍夫变换【效果图】", dstImage);
waitKey(0);
return 0;
}
霍夫圆变换
霍夫梯度法

HoughCircles()函数

#include <opencv2/opencv.hpp>
#include <opencv2/imgproc/imgproc.hpp>
using namespace cv;
using namespace std;
//-----------------------------------【main( )函数】--------------------------------------------
// 描述:控制台应用程序的入口函数,我们的程序从这里开始
//-----------------------------------------------------------------------------------------------
int main()
{
//【1】载入原始图、Mat变量定义
Mat srcImage = imread("1.jpg"); //工程目录下应该有一张名为1.jpg的素材图
Mat midImage, dstImage;//临时变量和目标图的定义
//【2】显示原始图
imshow("【原始图】", srcImage);
//【3】转为灰度图并进行图像平滑
cvtColor(srcImage, midImage, COLOR_BGR2GRAY);//转化边缘检测后的图为灰度图
GaussianBlur(midImage, midImage, Size(9, 9), 2, 2);
//【4】进行霍夫圆变换
vector<Vec3f> circles;
HoughCircles(midImage, circles, HOUGH_GRADIENT, 1.5, 10, 200, 100, 0, 0);
//【5】依次在图中绘制出圆
for (size_t i = 0; i < circles.size(); i++)
{
//参数定义
Point center(cvRound(circles[i][0]), cvRound(circles[i][1]));
int radius = cvRound(circles[i][2]);
//绘制圆心
circle(srcImage, center, 3, Scalar(0, 255, 0), -1, 8, 0);
//绘制圆轮廓
circle(srcImage, center, radius, Scalar(155, 50, 255), 3, 8, 0);
}
//【6】显示效果图
imshow("【效果图】", srcImage);
waitKey(0);
return 0;
}
opencv 5 图像转换(2 霍夫变换)的更多相关文章
- opencv 5 图像转换(1 边缘检测)
边缘检测 一般步骤 canny算子 步骤 canny函数 彩色canny #include<opencv2/opencv.hpp> #include<opencv2/highgui/ ...
- opencv 5 图像转换(3 重映射 仿射变换 直方图均衡化)
重映射 实现重映射(remap函数) 基础示例程序:基本重映射 //---------------------------------[头文件.命名空间包含部分]------------------- ...
- 【转】OpenCV与CxImage转换(IplImage)、IplImage QImage Mat 格式互转
最近由于在项目中用到了Opencv库,但是为了更好的显示图像还是使用了Cximage库,它可以快捷地存取.显示.转换各种图像.Opencv库用于高级图像处理与识别.为了使Cximage图像与Openc ...
- OpenCV 的颜色空间转换
# coding: utf-8 ''' 第13章主要介绍:颜色空间转换 ''' import cv2 import numpy as np ''' 经常用到的颜色空间转换是: BGR<-> ...
- OpenCV 学习笔记 02 使用opencv处理图像
1 不同色彩空间的转换 opencv 中有数百种关于不同色彩空间的转换方法,但常用的有三种色彩空间:灰度.BRG.HSV(Hue-Saturation-Value) 灰度 - 灰度色彩空间是通过去除彩 ...
- 12、OpenCV实现图像的直方图处理
1.直方图 一幅图像由不同灰度值的像素组成,图像中灰度的分布情况是该图像的一个重要特征.图像的灰度直方图就描述了图像中灰度分布情况,能够很直观的展示出图像中各个灰度级所占的多少.图像的灰度直方图是灰度 ...
- Java基于opencv实现图像数字识别(五)—投影法分割字符
Java基于opencv实现图像数字识别(五)-投影法分割字符 水平投影法 1.水平投影法就是先用一个数组统计出图像每行黑色像素点的个数(二值化的图像): 2.选出一个最优的阀值,根据比这个阀值大或小 ...
- Java基于opencv实现图像数字识别(四)—图像降噪
Java基于opencv实现图像数字识别(四)-图像降噪 我们每一步的工作都是基于前一步的,我们先把我们前面的几个函数封装成一个工具类,以后我们所有的函数都基于这个工具类 这个工具类呢,就一个成员变量 ...
- Java基于opencv实现图像数字识别(三)—灰度化和二值化
Java基于opencv实现图像数字识别(三)-灰度化和二值化 一.灰度化 灰度化:在RGB模型中,如果R=G=B时,则彩色表示灰度颜色,其中R=G=B的值叫灰度值:因此,灰度图像每个像素点只需一个字 ...
随机推荐
- java-反编译工具(luyten)
下载地址:https://github.com/deathmarine/Luyten
- Apache Flink 入门示例demo
在本文中,我们将从零开始,教您如何构建第一个Apache Flink (以下简称Flink)应用程序. 开发环境准备 Flink 可以运行在 Linux, Max OS X, 或者是 Windows ...
- < 配置jupyer notebook遇到的问题 - 500 : Internal Server Error >
< anaconda配置jupyer notebook遇到的问题 - 500 : Internal Server Error > 问题描述: 我的jupyer notebook是在anac ...
- 什么是Kafka?
1 kafka 是什么 Apache kafka is a distributed streaming platform,即官方定义 kafka 是一个分布式流式计算平台.而在大部分企业开发人员中,都 ...
- JAVA基础知识注意事项
JAVA核心技术卷一 (第十版) 下面是需要注意的: 只有方法名和参数类型叫做方法的签名, 不同的返回类型值不能作为方法的签名.(4.6.1) 这是域与局部变量的主要不同点. 必须明确地初始化方法中的 ...
- 2019.NET Conf,我们在共同期待
(一)回顾一个小社区红过的五分钟 不知不觉,距离中国.net社区组织的.net conf只有不到一周的时间,还记得年初在叶伟民老师,潘淳老师和张善友老师的号召下,我们长沙的十几位开发者自发组织起来,拉 ...
- zabbix导入数据库报错1046 (3D000) : No database selected
Zabbix导入数据库时报错 使用如下命令导入Zabbix数据库时报错 zcat /usr/share/doc/zabbix-server-mysql/create.sql.gz | mysql -u ...
- 前端上传图片 base64转二进制上传
var dataURItoBlob = function (dataURI) { var byteString = atob(dataURI.split(',')[1]); var mimeStrin ...
- 学习笔记15_ASP母版页
*网页母版页设计通用样式#header:{height:100px;width:1000px}#leftDiv:{float:left;width:200px}#mainDiv:{margin-lef ...
- 使用Typescript重构axios(二十九)——添加baseURL
0. 系列文章 1.使用Typescript重构axios(一)--写在最前面 2.使用Typescript重构axios(二)--项目起手,跑通流程 3.使用Typescript重构axios(三) ...