从DDPM到DDIM(四) 预测噪声与后处理
从DDPM到DDIM(四) 预测噪声与后处理
前情回顾
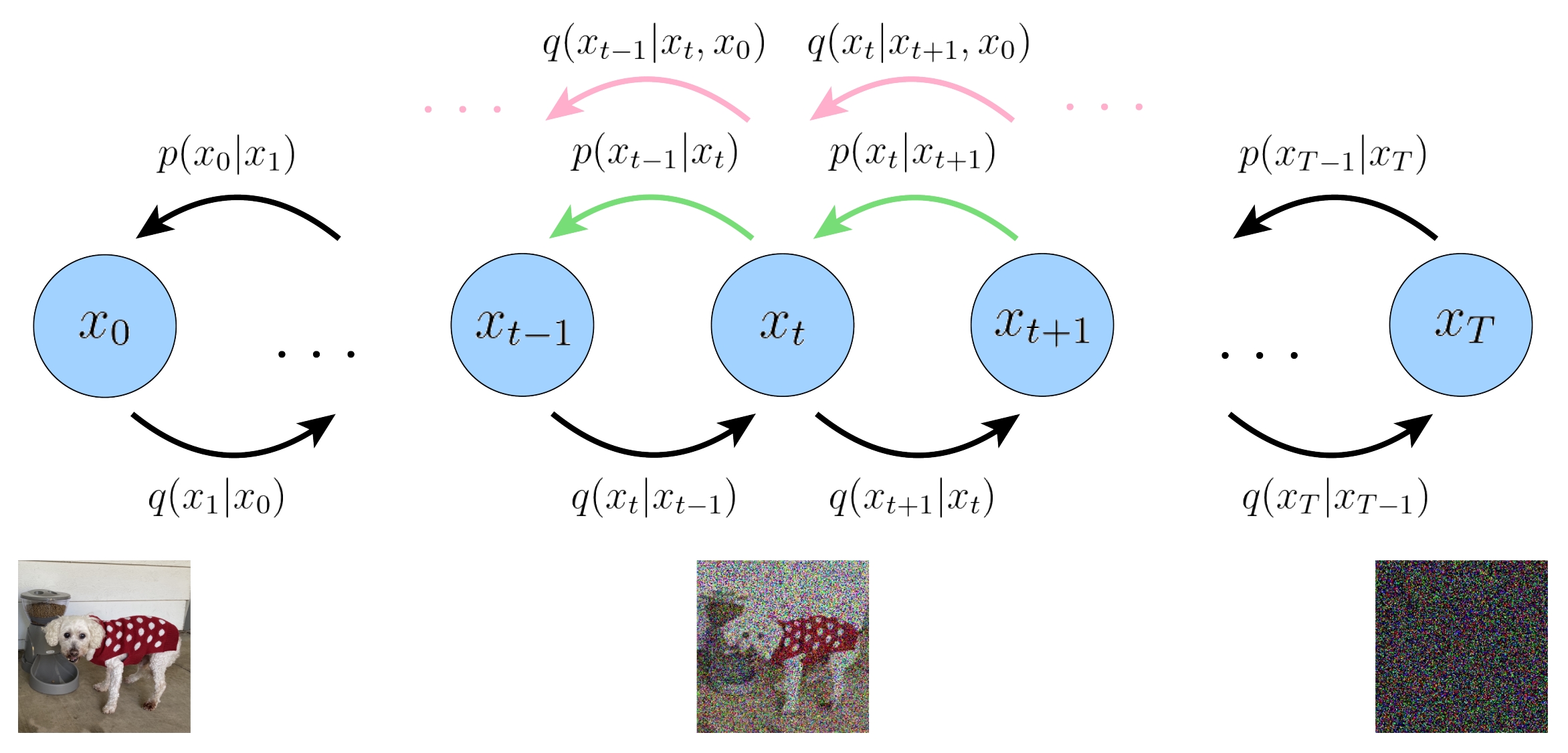
下图展示了DDPM的双向马尔可夫模型。
训练目标。最大化证据下界等价于最小化以下损失函数:
\]
推理过程。推理过程利用马尔可夫链蒙特卡罗方法。
\mathbf{x}_{t-1} &\sim p_{\theta}\left(\mathbf{x}_{t-1} | \mathbf{x}_{t}\right) = \mathcal{N}(\mathbf{x}_{t-1}; \tilde{\bm{\mu}}_{\theta}\left(\mathbf{x}_{t}, t\right) , \sigma^2 \left(t\right) \mathbf{I}) \\
\mathbf{x}_{t-1} &= \tilde{\bm{\mu}}_{\theta}\left(\mathbf{x}_{t}, t\right) + \sigma \left(t\right) \bm{\epsilon} \\
&= \frac{\left( 1 - \overline{\alpha}_{t-1} \right) \sqrt{\alpha_t}}{\left( 1 - \overline{\alpha}_{t} \right)} \mathbf{x}_{t} + \frac{\left(1 - \alpha_t\right) \sqrt{\overline{\alpha}_{t-1}}}{\left( 1 - \overline{\alpha}_{t} \right)} \tilde{\mathbf{x}}_{\theta} \left(\mathbf{x}_{t}, t\right) + \sigma \left(t\right) \bm{\epsilon}
\end{aligned} \tag{2}
\]
1、预测噪声
上一篇文章我们提到,扩散模型的神经网络用于预测 \(\mathbf{x}_{0}\),然而DDPM并不是这样做的,而是用神经网络预测噪声。这也是DDPM 第一个字母 D(Denoising)的含义。为什么采用预测噪声的参数化方法?DDPM作者在原文中提到去噪分数匹配(denoising score matching, DSM),并说这样训练和DSM是等价的。可见应该是收了DSM的启发。另外一个解释我们一会来讲。
按照上一篇文章的化简技巧,对于神经网络的预测输出 \(\tilde{\mathbf{x}}_{\boldsymbol{\theta}}\left(\mathbf{x}_t, t\right)\),也可以进行进一步参数化(parameterization):
已知:
\mathbf{x}_{t} = \sqrt{\overline{\alpha}_t} \mathbf{x}_{0} + \sqrt{1 - \overline{\alpha}_t} \bm{\epsilon}
\end{aligned} \tag{3}
\]
于是:
\mathbf{x}_{0} = \frac{1}{\sqrt{\overline{\alpha}_t}} \mathbf{x}_{t} + \frac{\sqrt{1 - \overline{\alpha}_t}}{\sqrt{\overline{\alpha}_t}} \bm{\epsilon}
\end{aligned} \tag{4}
\]
\tilde{\mathbf{x}}_{\boldsymbol{\theta}}\left(\mathbf{x}_t, t\right) = \frac{1}{\sqrt{\overline{\alpha}_t}} \mathbf{x}_{t} + \frac{\sqrt{1 - \overline{\alpha}_t}}{\sqrt{\overline{\alpha}_t}} \tilde{\bm{\epsilon}}_{\boldsymbol{\theta}}\left(\mathbf{x}_t, t\right)
\end{aligned} \tag{5}
\]
这里我们解释以下为什么采用预测噪声的方式的第二个原因。从(4)(5)两式可见,噪声项可以看作是 \(\mathbf{x}_{0}\) 与 \(\mathbf{x}_{t}\) 的残差项。回顾经典的Resnet结构:
\]
Resnet也是用神经网络学习的残差项。DDPM采用预测噪声的方法和Resnet残差学习由异曲同工之妙。
下面我们将(3)(4)两式代入(1)式,继续化简,有:
\Vert\tilde{\mathbf{x}}_{\boldsymbol{\theta}}\left(\mathbf{x}_t, t\right)-\mathbf{x}_0\Vert_2^2 &= \frac{1 - \overline{\alpha}_t}{\overline{\alpha}_t} \Vert\tilde{\bm{\epsilon}}_{\boldsymbol{\theta}}\left(\mathbf{x}_t, t\right)-\bm{\epsilon}\Vert_2^2
\end{aligned}
\]
注意 \(\overline{\alpha}_t\) = \(\overline{\alpha}_{t-1} \alpha_t\)于是可以得出新的优化方程:
\]
(6) 式表示,我们的神经网络 \(\tilde{\bm{\epsilon}}_{\boldsymbol{\theta}}\left(\sqrt{\overline{\alpha}_t} \mathbf{x}_{0} + \sqrt{1 - \overline{\alpha}_t} \bm{\epsilon}, t\right)\) 被用于预测最初始的噪声 \(\bm{\epsilon}\)。忽略掉前面的系数,对应的训练算法如下:
Algorithm 3 . Training a Deniosing Diffusion Probabilistic Model. (Version: Predict noise)
Repeat the following steps until convergence.
- For every image \(\mathbf{x}_0\) in your training dataset \(\mathbf{x}_0 \sim q\left(\mathbf{x}_0\right)\)
- Pick a random time step \(t \sim \text{Uniform}[1, T]\).
- Generate normalized Gaussian random noise \(\bm{\epsilon} \sim \mathcal{N} \left(\mathbf{0}, \mathbf{I}\right)\)
- Take gradient descent step on
\]
You can do this in batches, just like how you train any other neural networks. Note that, here, you are training one denoising network \(\tilde{\bm{\epsilon}}_{\boldsymbol{\theta}}\) for all noisy conditions.
推理的过程依然从马尔可夫链蒙特卡洛(MCMC)开始,因为这里是预测噪声,而推理的过程中也需要加噪声,为了区分,我们将推理过程中添加的噪声用 \(\mathbf{z} \sim \mathcal{N} \left(\mathbf{0}, \mathbf{I}\right)\) 来表示。推理过程中每次推理的噪声 \(\mathbf{z}\) 都是不同的,但训练过程中要拟合的最初的目标噪声 \(\bm{\epsilon}\) 是相同的。
\mathbf{x}_{t-1} &\sim p_{\theta}\left(\mathbf{x}_{t-1} | \mathbf{x}_{t}\right) = \mathcal{N}(\mathbf{x}_{t-1}; \tilde{\bm{\mu}}_{\theta}\left(\mathbf{x}_{t}, t\right) , \sigma^2 \left(t\right) \mathbf{I}) \\
\mathbf{x}_{t-1} &= \tilde{\bm{\mu}}_{\theta}\left(\mathbf{x}_{t}, t\right) + \sigma \left(t\right) \mathbf{z} \\
&= \frac{\left( 1 - \overline{\alpha}_{t-1} \right) \sqrt{\alpha_t}}{\left( 1 - \overline{\alpha}_{t} \right)} \mathbf{x}_{t} + \frac{\left(1 - \alpha_t\right) \sqrt{\overline{\alpha}_{t-1}}}{\left( 1 - \overline{\alpha}_{t} \right)} \tilde{\mathbf{x}}_{\theta} \left(\mathbf{x}_{t}, t\right) + \sigma \left(t\right) \mathbf{z}
\end{aligned} \tag{7}
\]
将(5)式代入:
\tilde{\bm{\mu}}_{\theta}\left(\mathbf{x}_{t}, t\right) &= \frac{\left( 1 - \overline{\alpha}_{t-1} \right) \sqrt{\alpha_t}}{\left( 1 - \overline{\alpha}_{t} \right)} \mathbf{x}_{t} + \frac{\left(1 - \alpha_t\right) \sqrt{\overline{\alpha}_{t-1}}}{\left( 1 - \overline{\alpha}_{t} \right)} \tilde{\mathbf{x}}_{\theta} \left(\mathbf{x}_{t}, t\right) \\
&= \frac{\left( 1 - \overline{\alpha}_{t-1} \right) \sqrt{\alpha_t}}{\left( 1 - \overline{\alpha}_{t} \right)} \mathbf{x}_{t} + \frac{\left(1 - \alpha_t\right) \sqrt{\overline{\alpha}_{t-1}}}{\left( 1 - \overline{\alpha}_{t} \right)} \left( \frac{1}{\sqrt{\overline{\alpha}_t}} \mathbf{x}_{t} + \frac{\sqrt{1 - \overline{\alpha}_t}}{\sqrt{\overline{\alpha}_t}} \tilde{\bm{\epsilon}}_{\boldsymbol{\theta}}\left(\mathbf{x}_t, t\right) \right) \\
&= \text{some algebra calculation} \\
&= \frac{1}{\sqrt{\overline{\alpha}_t}} \mathbf{x}_{t} + \frac{1 - \alpha_t}{ \sqrt{ \left( 1 - \overline{\alpha}_{t} \right)\alpha}_t} \tilde{\bm{\epsilon}}_{\boldsymbol{\theta}}\left(\mathbf{x}_t, t\right)
\end{aligned}
\]
所以推理的表达式为:
\mathbf{x}_{t-1} &= \frac{1}{\sqrt{\overline{\alpha}_t}} \mathbf{x}_{t} + \frac{1 - \alpha_t}{ \sqrt{ \left( 1 - \overline{\alpha}_{t} \right)\alpha}_t} \tilde{\bm{\epsilon}}_{\boldsymbol{\theta}}\left(\mathbf{x}_t, t\right) + \sigma \left(t\right) \mathbf{z}
\end{aligned} \tag{7}
\]
下面可以写出采用拟合噪声策略的推理算法:
Algorithm 4 . Inference on a Deniosing Diffusion Probabilistic Model. (Version: Predict noise)
You give us a white noise vector \(\mathbf{x}_T \sim \mathcal{N} \left(\mathbf{0}, \mathbf{I}\right)\)
Repeat the following for \(t = T, T − 1, ... , 1\).
- Generate \(\mathbf{z} \sim \mathcal{N} \left(\mathbf{0}, \mathbf{I}\right)\) if \(t > 1\) else \(\mathbf{z} = \mathbf{0}\)
\]
Return \(\mathbf{x}_{0}\)
2、后处理
首先要注意到,在推理算法的最后一步,生成图像的时候,并没有添加噪声,而是直接采用预测的均值作为 \(\mathcal{x}_0\) 的估计值。
另外,生成的图像原本是归一化到 \([-1, 1]\) 之间的,所以要反归一化到 \([0, 255]\)。这里比较简单,直接看 diffusers 库中的代码:
image = (image / 2 + 0.5).clamp(0, 1)
image = image.cpu().permute(0, 2, 3, 1).numpy()
if output_type == "pil":
image = self.numpy_to_pil(image)
if not return_dict:
return (image,)
def numpy_to_pil(images):
"""
Convert a numpy image or a batch of images to a PIL image.
"""
if images.ndim == 3:
images = images[None, ...]
images = (images * 255).round().astype("uint8")
if images.shape[-1] == 1:
# special case for grayscale (single channel) images
pil_images = [Image.fromarray(image.squeeze(), mode="L") for image in images]
else:
pil_images = [Image.fromarray(image) for image in images]
return pil_images
3、总结
我们最初的目标是估计图像的概率分布,采用极大似然估计法,求 \(\log p\left(\mathbf{x}_0\right)\)。但是直接求解,很难求:
p\left(\mathbf{x}_0\right) = \int p\left(\mathbf{x}_{0:T}\right) d \mathbf{x}_{1:T} \\
\end{aligned} \\
\]
而且 \(p\left(\mathbf{x}_{0:T}\right)\) 也不知道。于是我们选择估计它的证据下界。在计算证据下界的过程中,我们解析了双向马尔可夫链中的很多分布和变量,最终推导出证据下界的表达式,以KL散度的方式来表示。这样做本质上是用已知的分布 \(q\left(\mathbf{x}_{1:T} | \mathbf{x}_{0}\right)\) 来对未知的分布做逼近。这其实是 变分推断 的思想。变分法是寻找一个函数使得这个函数最能满足条件,而变分推断是寻找一个分布使之更加逼近已知的分布。
于是我们而在高斯分布的假设下,KL散度恰好等价于二范数的平方。最大似然估计等价于最小化二范数loss。之后就顺理成章地推导出了训练方法,并根据马尔可夫链蒙特卡洛推导出推理算法。关于变分推断和马尔可夫链蒙特卡洛相关的知识,读者可以自行查找,有时间我也会写篇文章来介绍。
以上就是DDPM的全部内容了,我用了四篇文章对DDPM进行了详细推导,写文章的过程中也弄懂了自己之前不懂的一些细节。我的最大的感受是,初学者千万不要相信诸如《一文读懂DDPM》之类的文章,如果要真正搞懂DDPM,只有自己把所有公式手推一边才是正道。
下一篇我们开始介绍DDPM的一个经典的推理加速方法:DDIM
从DDPM到DDIM(四) 预测噪声与后处理的更多相关文章
- 一文详解扩散模型:DDPM
作者:京东零售 刘岩 扩散模型讲解 前沿 人工智能生成内容(AI Generated Content,AIGC)近年来成为了非常前沿的一个研究方向,生成模型目前有四个流派,分别是生成对抗网络(Gene ...
- 目标跟踪之卡尔曼滤波---理解Kalman滤波的使用预测
Kalman滤波简介 Kalman滤波是一种线性滤波与预测方法,原文为:A New Approach to Linear Filtering and Prediction Problems.文章推导很 ...
- 【Deep Learning】DDPM
DDPM 1. 大致流程 1.1 宏观流程 1.2 训练过程 1.3 推理过程 2. 对比GAN 2.1 GAN流程 2.2 相比GAN优点 训练过程更稳定,损失函数指向性更强(loss数值大小指示训 ...
- 【滤波】标量Kalman滤波的过程分析和证明及C实现
摘要: 标量Kalman滤波的过程分析和证明及C实现,希望能够帮助入门的小白,同时得到各位高手的指教.并不涉及其他Kalman滤波方法. 本文主要参考自<A Introduction to th ...
- 理解Kalman滤波的使用
Kalman滤波简介 Kalman滤波是一种线性滤波与预测方法,原文为:A New Approach to Linear Filtering and Prediction Problems.文章推导很 ...
- paper 2:图像处理常用的Matlab函数汇总
一 图像的读写 1 imread imread函数用于读入各种图像文件,如:a=imread('e:\w01.tif') 注:计算机E盘上要有w01相应的.tif文件. 2 imwrite imwri ...
- matlab中图像处理常见用法
一. 读写图像文件 1. imread imread函数用于读入各种图像文件,如:a=imread('e:/w01.tif') 注:计算机E盘上要有w01相应的.tif文件. 2. imwrite i ...
- matlab 对图像操作的函数概览
转自博客:http://blog.163.com/fei_lai_feng/blog/static/9289962200991713415422/ 一. 读写图像文件 1. imread imread ...
- 通俗理解kalman filter原理
[哲学思想]即使我们对真相(真值)一无所知,我们任然可以通过研究事物规律,历史信息,当前观测而能尽可能靠近真相(真值). [线性预测模型]温度的变化是线性规律的,已知房间温度真值每小时上升1度左右(用 ...
- 【Unity Shader】2D动态云彩
写在前面 赶在年前写一篇文章.之前翻看2015年的SIGGRAPH Course(关于渲染的可以去selfshadow的博客里找到,很全)的时候看到了关于体积云的渲染.这个课程讲述了开发者为游戏< ...
随机推荐
- linux系统重要文件和目录说明
系统信息相关文件 /etc/issue 记录操作系统版本 head /etc/issue /proc/cpuinfo 记录cpu信息 cat /proc/cpuinfo /proc/meminfo 记 ...
- navicat 如何调整查询区域字体大小
Navicat是一套快速.可靠和全面的数据库管理工具,专门用于简化数据库管理和降低管理成本.Navicat图形界面直观,提供简便的管理方法,设计和操作MySQL.MariaDB.SQL Server. ...
- foxy rviz2 "rviz_common/Time"报错问题
报错内容 The class required for this panel, 'rviz_common/Time', could not be loaded. Error: According to ...
- 鸿蒙HarmonyOS实战-ArkTS语言基础类库(容器类库)
前言 容器类库是指一组用于存储和管理数据的数据结构和算法.它们提供了各种不同类型的容器,如数组.链表.树.图等,以及相关的操作和功能,如查找.插入.删除.排序等. 容器类库还可以包含其他数据结构和算法 ...
- lxl学长讲课笔记
lxl 学长讲课笔记 常数种可能性的状态 通过预先处理多种状态的信息,从而快速的转换状态. 经典操作:flip. 分析信息的思路 利用线段树 利用线段树的时候,如何合并两个分支区间的信息,我们需要有如 ...
- oppo、一加 android14 chrome116内核 input @click不触发
// 兼容Chrome内核116及以上版本中配置disabled的input组件无法触发并冒泡click事件 .uni-input-input:disabled { pointer-events: n ...
- (四)Redis 缓存应用、淘汰机制
1.缓存应用 一个系统中不同层面数据访问速度不一样,以计算机为例,CPU.内存和磁盘这三层的访问速度从几十 ns 到 100ns,再到几 ms,性能的差异很大,如果每次 CPU 处理数据时都要到磁盘读 ...
- 《Javscript实用教程》目录
图书购买地址: 京东:<Javscript实用教程> 当当:<Javscript实用教程> 天猫:<Javscript实用教程> 注:本书提供源码和ppt课件,下载 ...
- CentOS8 安装ansible
# 安装epel扩展源 yum install https://dl.fedoraproject.org/pub/epel/epel-release-latest-8.noarch.rpm -y # ...
- poj1338 ugly number 题解 打表
类似的题目有HDU1058 humble number(翻译下来都是丑陋的数字). Description Ugly numbers are numbers whose only prime fact ...