卷积神经网络中nn.Conv2d()和nn.MaxPool2d()以及卷积神经网络实现minist数据集分类
卷积神经网络中nn.Conv2d()和nn.MaxPool2d()
卷积神经网络之Pythorch实现:
nn.Conv2d()就是PyTorch中的卷积模块
参数列表
| 参数 | 作用 |
|---|---|
| in_channels | 输入数据体的深度 |
| out_channels | 输出数 据体的深度 |
| kernel_size | 滤波器(卷积核)的大小 注1 |
| stride | 滑动的步长 |
| padding | 零填充的圈数 注2 |
| bias | 是否启用偏置,默认是True,代表启用 |
| groups | 输出数据体深度上和输入数 据体深度上的联系 注3 |
| dilation | 卷积对于输入数据体的空间间隔 注4 |
注:1. 可以使用一 个数字来表示高和宽相同的卷积核,比如 kernel_size=3,也可以使用 不同的数字来表示高和宽不同的卷积核,比如 kernel_size=(3, 2);
padding=0表示四周不进行零填充,而 padding=1表示四周进行1个像素点的零填充;
groups表示输出数据体深度上和输入数 据体深度上的联系,默认 groups=1,也就是所有的输出和输入都是相 关联的,如果 groups=2,这表示输入的深度被分割成两份,输出的深 度也被分割成两份,它们之间分别对应起来,所以要求输出和输入都 必须要能被 groups整除。
默认dilation=1详情见 nn.Conv2d()中dilation参数的作用或者CSDN
nn.MaxPool2d()表示网络中的最大值池化
参数列表:
| 参数 | 作用 |
|---|---|
| kernel_size | 与上面nn.Conv2d()相同 |
| stride | 与上面nn.Conv2d()相同 |
| padding | 与上面nn.Conv2d()相同 |
| dilation | 与上面nn.Conv2d()相同 |
| return_indices | 表示是否返回最大值所处的下标,默认 return_indices=False |
| ceil_mode | 表示使用一些方格代替层结构,默认 ceil_mode=False |
注:一般不会去设置return_indices和ceil_mode参数
import torch.nn as nn
class SimpleCNN(nn.Module):
def __init__(self):
super(SimpleCNN, self).__init__()
layer1 = nn.Sequential()
# 把一个三通道的照片RGB三个使用32组卷积核卷积,每组三个卷积核,组内卷积后相加得出32组输出
layer1.add_module('conv1', nn.Conv2d(3, 32, (3, 3), (1, 1), padding=1))
layer1.add_module('relu1', nn.ReLU(True))
layer1.add_module('pool1', nn.MaxPool2d(2, 2))
self.layer1 = layer1
layer2 = nn.Sequential()
layer2.add_module('conv2', nn.Conv2d(32, 64, (3, 3), (1, 1), padding=1))
layer2.add_module('relu2', nn.ReLU(True))
layer2.add_module('pool2', nn.MaxPool2d(2, 2))
self.layer2 = layer2
layer3 = nn.Sequential()
layer3.add_module('conv3', nn.Conv2d(64, 128, (3, 3), (1, 1), padding=1))
layer3.add_module('relu3', nn.ReLU(True))
layer3.add_module('pool3', nn.MaxPool2d(2, 2))
self.layer3 = layer3
layer4 = nn.Sequential()
layer4.add_module('fc1', nn.Linear(2048, 512))
layer4.add_module('fc_relu1', nn.ReLU(True))
layer4.add_module('fc2', nn.Linear(512, 64))
layer4.add_module('fc_relu2', nn.ReLU(True))
layer4.add_module('f3', nn.Linear(64, 10))
self.layer4 = layer4
def forward(self, x):
conv1 = self.layer1(x)
conv2 = self.layer2(conv1)
conv3 = self.layer3(conv2)
fc_input = conv3.view(conv3.size(0), -1)
fc_out = self.layer4(fc_input)
return fc_out
model = SimpleCNN()
print(model)
输出
SimpleCNN(
(layer1): Sequential(
(conv1): Conv2d(3, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(relu1): ReLU(inplace=True)
(pool1): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(layer2): Sequential(
(conv2): Conv2d(32, 64, kernel_size=(3, 3), stride=(1, 1))
(relu2): ReLU(inplace=True)
(pool2): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(layer3): Sequential(
(conv3): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(relu3): ReLU(inplace=True)
(pool3): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(layer4): Sequential(
(fc1): Linear(in_features=2048, out_features=512, bias=True)
(fc_relu1): ReLU(inplace=True)
(fc2): Linear(in_features=512, out_features=64, bias=True)
(fc_relu2): ReLU(inplace=True)
(f3): Linear(in_features=64, out_features=10, bias=True)
)
)
提取模型的层级结构
提取层级结构可以使用以下几个nn.Model的属性,第一个是children()属性,它会返回下一级模块的迭代器,在上面这个模型中,它会返回在self.layer1,self.layer2,self.layer4上的迭代器而不会返回它们内部的东西;modules()
会返回模型中所有的模块的迭代器,这样它就能访问到最内层,比如self.layer1.conv1这个模块;还有一个与它们相对应的是name_children()属性以及named_modules(),这两个不仅会返回模块的迭代器,还会返回网络层的名字。
提取出model中的前两层
nn.Sequential(*list(model.children())[:2])
输出:
Sequential(
(0): Sequential(
(conv1): Conv2d(3, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(relu1): ReLU(inplace=True)
(pool1): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(1): Sequential(
(conv2): Conv2d(32, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(relu2): ReLU(inplace=True)
(pool2): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
)
提取出model中的所有卷积层
conv_model = nn.Sequential()
for layer in model.named_modules():
if isinstance(layer[1], nn.Conv2d):
conv_model.add_module(layer[0].split('.')[1] ,layer[1])
print(conv_model)
输出:
Sequential(
(conv1): Conv2d(3, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(conv2): Conv2d(32, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(conv3): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
)
提取网络参数并对其初始化
nn.Moudel里面有两个特别重要的关于参数的属性,分别是named_parameters()和parameters()。前者会输出网络层的名字和参数的迭代器,后者会给出一个网络的全部参数的迭代器。
for param in model.named_parameters():
print(param[0])
# print(param[1])
输出:
layer1.conv1.weight
layer1.conv1.bias
layer2.conv2.weight
layer2.conv2.bias
layer3.conv3.weight
layer3.conv3.bias
layer4.fc1.weight
layer4.fc1.bias
layer4.fc2.weight
layer4.fc2.bias
layer4.f3.weight
layer4.f3.bias
案例:使用卷积神经网络实现对Minist数据集的预测
import matplotlib.pyplot as plt
import torch.utils.data
import torchvision.datasets
import os
import torch.nn as nn
from torchvision import transforms
class CNN(nn.Module):
def __init__(self):
super(CNN, self).__init__()
self.layer1 = nn.Sequential(
nn.Conv2d(1, 16, kernel_size=(3, 3)),
nn.BatchNorm2d(16),
nn.ReLU(inplace=True),
)
self.layer2 = nn.Sequential(
nn.Conv2d(16, 32, kernel_size=(3, 3)),
nn.BatchNorm2d(32),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=2, stride=2),
)
self.layer3 = nn.Sequential(
nn.Conv2d(32, 64, kernel_size=(3, 3)),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True)
)
self.layer4 = nn.Sequential(
nn.Conv2d(64, 128, kernel_size=(3, 3)),
nn.BatchNorm2d(128),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=2, stride=2)
)
self.fc = nn.Sequential(
nn.Linear(128 * 4 * 4, 1024),
nn.ReLU(inplace=True),
nn.Linear(1024, 128),
nn.Linear(128, 10)
)
def forward(self, x):
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
x = x.view(x.size(0), -1)
x = self.fc(x)
return x
os.environ["KMP_DUPLICATE_LIB_OK"] = "TRUE"
data_tf = transforms.Compose(
[transforms.ToTensor(),
transforms.Normalize([0.5], [0.5])]
)
train_dataset = torchvision.datasets.MNIST(root='F:/机器学习/pytorch/书/data/mnist', train=True,
transform=data_tf, download=True)
test_dataset = torchvision.datasets.MNIST(root='F:/机器学习/pytorch/书/data/mnist', train=False,
transform=data_tf, download=True)
batch_size = 100
train_loader = torch.utils.data.DataLoader(
dataset=train_dataset, batch_size=batch_size
)
test_loader = torch.utils.data.DataLoader(
dataset=test_dataset, batch_size=batch_size
)
model = CNN()
model = model.cuda()
criterion = nn.CrossEntropyLoss()
criterion = criterion.cuda()
optimizer = torch.optim.Adam(model.parameters())
# 节约时间,三次够了
iter_step = 3
loss1 = []
loss2 = []
for step in range(iter_step):
loss1_count = 0
loss2_count = 0
for images, labels in train_loader:
images = images.cuda()
labels = labels.cuda()
images = images.reshape(-1, 1, 28, 28)
output = model(images)
pred = output.squeeze()
optimizer.zero_grad()
loss = criterion(pred, labels)
loss.backward()
optimizer.step()
_, pred = torch.max(pred, 1)
loss1_count += int(torch.sum(pred == labels)) / 100
# 测试
else:
test_loss = 0
accuracy = 0
with torch.no_grad():
for images, labels in test_loader:
images = images.cuda()
labels = labels.cuda()
pred = model(images.reshape(-1, 1, 28, 28))
_, pred = torch.max(pred, 1)
loss2_count += int(torch.sum(pred == labels)) / 100
loss1.append(loss1_count / len(train_loader))
loss2.append(loss2_count / len(test_loader))
print(f'第{step}次训练:训练准确率:{loss1[len(loss1)-1]},测试准确率:{loss2[len(loss2)-1]}')
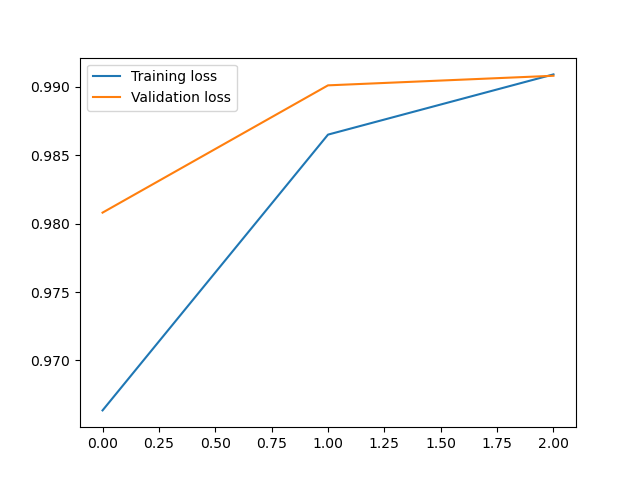
plt.plot(loss1, label='Training loss')
plt.plot(loss2, label='Validation loss')
plt.legend()
输出:
第0次训练:训练准确率:0.9646166666666718,测试准确率:0.9868999999999996
第1次训练:训练准确率:0.9865833333333389,测试准确率:0.9908999999999998
第2次训练:训练准确率:0.9917000000000039,测试准确率:0.9879999999999994
<matplotlib.legend.Legend at 0x21f03092fd0>
卷积神经网络中nn.Conv2d()和nn.MaxPool2d()以及卷积神经网络实现minist数据集分类的更多相关文章
- tf.nn.conv2d。卷积函数
tf.nn.conv2d是TensorFlow里面实现卷积的函数,参考文档对它的介绍并不是很详细,实际上这是搭建卷积神经网络比较核心的一个方法,非常重要 tf.nn.conv2d(input, fil ...
- 【TensorFlow】tf.nn.conv2d是怎样实现卷积的?
tf.nn.conv2d是TensorFlow里面实现卷积的函数,参考文档对它的介绍并不是很详细,实际上这是搭建卷积神经网络比较核心的一个方法,非常重要 tf.nn.conv2d(input, fil ...
- TF-卷积函数 tf.nn.conv2d 介绍
转自 http://www.cnblogs.com/welhzh/p/6607581.html 下面是这位博主自己的翻译加上测试心得 tf.nn.conv2d是TensorFlow里面实现卷积的函数, ...
- tf.nn.conv2d 参数介绍
tf.nn.conv2d是TensorFlow里面实现卷积的函数,参考文档对它的介绍并不是很详细,实际上这是搭建卷积神经网络比较核心的一个方法,非常重要 tf.nn.conv2d(input, fil ...
- Pytorch本人疑问(1) torch.nn和torch.nn.functional之间的区别
在写代码时发现我们在定义Model时,有两种定义方法: torch.nn.Conv2d()和torch.nn.functional.conv2d() 那么这两种方法到底有什么区别呢,我们通过下述代码看 ...
- AI芯片:高性能卷积计算中的数据复用
随着深度学习的飞速发展,对处理器的性能要求也变得越来越高,随之涌现出了很多针对神经网络加速设计的AI芯片.卷积计算是神经网络中最重要的一类计算,本文分析了高性能卷积计算中的数据复用,这是AI芯片设计中 ...
- 深度学习原理与框架-Tensorflow卷积神经网络-卷积神经网络mnist分类 1.tf.nn.conv2d(卷积操作) 2.tf.nn.max_pool(最大池化操作) 3.tf.nn.dropout(执行dropout操作) 4.tf.nn.softmax_cross_entropy_with_logits(交叉熵损失) 5.tf.truncated_normal(两个标准差内的正态分布)
1. tf.nn.conv2d(x, w, strides=[1, 1, 1, 1], padding='SAME') # 对数据进行卷积操作 参数说明:x表示输入数据,w表示卷积核, stride ...
- tf入门-tf.nn.conv2d是怎样实现卷积的?
转自:https://blog.csdn.net/mao_xiao_feng/article/details/78004522 实验环境:tensorflow版本1.2.0,python2.7 介绍 ...
- Pytorch中nn.Conv2d的用法
Pytorch中nn.Conv2d的用法 nn.Conv2d是二维卷积方法,相对应的还有一维卷积方法nn.Conv1d,常用于文本数据的处理,而nn.Conv2d一般用于二维图像. 先看一下接口定义: ...
- tf.nn.conv2d卷积函数之图片轮廓提取
一.tensorflow中二维卷积函数的参数含义:def conv2d(input, filter, strides, padding, use_cudnn_on_gpu=True, data_for ...
随机推荐
- HTML link标签中preload,prefetch,dns-prefetch,preconnect,prerender
Preload 在我们的浏览器加载资源的时候,对于每一个资源都有其自身的默认优先级,倘若我们能修改每一个资源的默认优先级,那我们几乎可以按照我们的预期加载想要加载的资源. 以谷歌浏览器为例,我们打开控 ...
- C语言:如何实现在txt文件中删除超链接、统计单词数量、生成单词列表 (文本流操作并解决乱码)
1.首先读取原文件内容文本流(包含中英文) 2.删除超链接 3.统计单词数量 4.去除重复单词 读取文件需要自己在文本笔记中保存一个网页,保存为txt文件 注意的是,在这个代码实现过程中,我学到的是如 ...
- pyinstaller 打包无窗口python http.server无法启动
最近在写一个简单的文件服务器用来访问静态文件,遇到在pyinstaller无窗口模式下无法启动的问题,记录一下解决方案. 原因:http.server需要将记录输出到窗口,而pyinstaller打包 ...
- 内存优化:Boxing
dotMemory 如今,许多开发人员都熟悉性能分析的工作流程:在分析器下运行应用程序,测量方法的执行时间,识别占用时间较多的方法,并致力于优化它们.然而,这种情况并没有涵盖到一个重要的性能指标:应用 ...
- sql数据的操作
/* 数据的写入 名称 : 库名 表名 字段名 用 反引号包裹 数据 : 字符串数据使用单引号包裹 ...
- ETL工具-nifi干货系列 第十一讲 处理器UpdateAttribute使用教程
1.在这里我们重温下nifi里面一个重要的概念FlowFile,如下图所示: FlowFile:FlowFile代表NiFi中的单个数据.nifi数据流中流动的就是flowfile,每个nifi处理器 ...
- Stable Diffusion 解析:探寻 AI 绘画背后的科技神秘
AI 绘画发展史 在谈论 Stable Diffusion 之前,有必要先了解 AI 绘画的发展历程. 早在 2012 年,华人科学家吴恩达领导的团队训练出了当时世界上最大的深度学习网络.这个网络能够 ...
- 极限科技(INFINI labs)荣获中国信通院大数据“星河”标杆案例
12 月 6 日,由中国信息通信研究院和中国通信标准化协会大数据技术标准推进委员会(CCSA TC601)共同组织的 2023 大数据"星河(Galaxy)"案例评选结果正式公示. ...
- C#.NET根据不同业务类别类型写入不同文件中,动态创建log4net实例验证
C#.NET根据不同业务类别类型写入不同文件中,动态创建log4net实例验证 参考了:https://www.cnblogs.com/-dawn/p/8598566.html GetLog4netI ...
- 小米红米手机应用APP字体太小
小米红米手机应用APP字体太小 调整了手机显示大小,只能解决一点点,还是有点小,比如B站.微博. 调整了系统字体大小,B站.微博又不受系统字体大小控制. 只能通过修改最小宽度来解决. 1.打开开发者选 ...