卷积神经网络中nn.Conv2d()和nn.MaxPool2d()以及卷积神经网络实现minist数据集分类
卷积神经网络中nn.Conv2d()和nn.MaxPool2d()
卷积神经网络之Pythorch实现:
nn.Conv2d()就是PyTorch中的卷积模块
参数列表
| 参数 | 作用 |
|---|---|
| in_channels | 输入数据体的深度 |
| out_channels | 输出数 据体的深度 |
| kernel_size | 滤波器(卷积核)的大小 注1 |
| stride | 滑动的步长 |
| padding | 零填充的圈数 注2 |
| bias | 是否启用偏置,默认是True,代表启用 |
| groups | 输出数据体深度上和输入数 据体深度上的联系 注3 |
| dilation | 卷积对于输入数据体的空间间隔 注4 |
注:1. 可以使用一 个数字来表示高和宽相同的卷积核,比如 kernel_size=3,也可以使用 不同的数字来表示高和宽不同的卷积核,比如 kernel_size=(3, 2);
padding=0表示四周不进行零填充,而 padding=1表示四周进行1个像素点的零填充;
groups表示输出数据体深度上和输入数 据体深度上的联系,默认 groups=1,也就是所有的输出和输入都是相 关联的,如果 groups=2,这表示输入的深度被分割成两份,输出的深 度也被分割成两份,它们之间分别对应起来,所以要求输出和输入都 必须要能被 groups整除。
默认dilation=1详情见 nn.Conv2d()中dilation参数的作用或者CSDN
nn.MaxPool2d()表示网络中的最大值池化
参数列表:
| 参数 | 作用 |
|---|---|
| kernel_size | 与上面nn.Conv2d()相同 |
| stride | 与上面nn.Conv2d()相同 |
| padding | 与上面nn.Conv2d()相同 |
| dilation | 与上面nn.Conv2d()相同 |
| return_indices | 表示是否返回最大值所处的下标,默认 return_indices=False |
| ceil_mode | 表示使用一些方格代替层结构,默认 ceil_mode=False |
注:一般不会去设置return_indices和ceil_mode参数
import torch.nn as nn
class SimpleCNN(nn.Module):
def __init__(self):
super(SimpleCNN, self).__init__()
layer1 = nn.Sequential()
# 把一个三通道的照片RGB三个使用32组卷积核卷积,每组三个卷积核,组内卷积后相加得出32组输出
layer1.add_module('conv1', nn.Conv2d(3, 32, (3, 3), (1, 1), padding=1))
layer1.add_module('relu1', nn.ReLU(True))
layer1.add_module('pool1', nn.MaxPool2d(2, 2))
self.layer1 = layer1
layer2 = nn.Sequential()
layer2.add_module('conv2', nn.Conv2d(32, 64, (3, 3), (1, 1), padding=1))
layer2.add_module('relu2', nn.ReLU(True))
layer2.add_module('pool2', nn.MaxPool2d(2, 2))
self.layer2 = layer2
layer3 = nn.Sequential()
layer3.add_module('conv3', nn.Conv2d(64, 128, (3, 3), (1, 1), padding=1))
layer3.add_module('relu3', nn.ReLU(True))
layer3.add_module('pool3', nn.MaxPool2d(2, 2))
self.layer3 = layer3
layer4 = nn.Sequential()
layer4.add_module('fc1', nn.Linear(2048, 512))
layer4.add_module('fc_relu1', nn.ReLU(True))
layer4.add_module('fc2', nn.Linear(512, 64))
layer4.add_module('fc_relu2', nn.ReLU(True))
layer4.add_module('f3', nn.Linear(64, 10))
self.layer4 = layer4
def forward(self, x):
conv1 = self.layer1(x)
conv2 = self.layer2(conv1)
conv3 = self.layer3(conv2)
fc_input = conv3.view(conv3.size(0), -1)
fc_out = self.layer4(fc_input)
return fc_out
model = SimpleCNN()
print(model)
输出
SimpleCNN(
(layer1): Sequential(
(conv1): Conv2d(3, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(relu1): ReLU(inplace=True)
(pool1): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(layer2): Sequential(
(conv2): Conv2d(32, 64, kernel_size=(3, 3), stride=(1, 1))
(relu2): ReLU(inplace=True)
(pool2): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(layer3): Sequential(
(conv3): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(relu3): ReLU(inplace=True)
(pool3): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(layer4): Sequential(
(fc1): Linear(in_features=2048, out_features=512, bias=True)
(fc_relu1): ReLU(inplace=True)
(fc2): Linear(in_features=512, out_features=64, bias=True)
(fc_relu2): ReLU(inplace=True)
(f3): Linear(in_features=64, out_features=10, bias=True)
)
)
提取模型的层级结构
提取层级结构可以使用以下几个nn.Model的属性,第一个是children()属性,它会返回下一级模块的迭代器,在上面这个模型中,它会返回在self.layer1,self.layer2,self.layer4上的迭代器而不会返回它们内部的东西;modules()
会返回模型中所有的模块的迭代器,这样它就能访问到最内层,比如self.layer1.conv1这个模块;还有一个与它们相对应的是name_children()属性以及named_modules(),这两个不仅会返回模块的迭代器,还会返回网络层的名字。
提取出model中的前两层
nn.Sequential(*list(model.children())[:2])
输出:
Sequential(
(0): Sequential(
(conv1): Conv2d(3, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(relu1): ReLU(inplace=True)
(pool1): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(1): Sequential(
(conv2): Conv2d(32, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(relu2): ReLU(inplace=True)
(pool2): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
)
提取出model中的所有卷积层
conv_model = nn.Sequential()
for layer in model.named_modules():
if isinstance(layer[1], nn.Conv2d):
conv_model.add_module(layer[0].split('.')[1] ,layer[1])
print(conv_model)
输出:
Sequential(
(conv1): Conv2d(3, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(conv2): Conv2d(32, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(conv3): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
)
提取网络参数并对其初始化
nn.Moudel里面有两个特别重要的关于参数的属性,分别是named_parameters()和parameters()。前者会输出网络层的名字和参数的迭代器,后者会给出一个网络的全部参数的迭代器。
for param in model.named_parameters():
print(param[0])
# print(param[1])
输出:
layer1.conv1.weight
layer1.conv1.bias
layer2.conv2.weight
layer2.conv2.bias
layer3.conv3.weight
layer3.conv3.bias
layer4.fc1.weight
layer4.fc1.bias
layer4.fc2.weight
layer4.fc2.bias
layer4.f3.weight
layer4.f3.bias
案例:使用卷积神经网络实现对Minist数据集的预测
import matplotlib.pyplot as plt
import torch.utils.data
import torchvision.datasets
import os
import torch.nn as nn
from torchvision import transforms
class CNN(nn.Module):
def __init__(self):
super(CNN, self).__init__()
self.layer1 = nn.Sequential(
nn.Conv2d(1, 16, kernel_size=(3, 3)),
nn.BatchNorm2d(16),
nn.ReLU(inplace=True),
)
self.layer2 = nn.Sequential(
nn.Conv2d(16, 32, kernel_size=(3, 3)),
nn.BatchNorm2d(32),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=2, stride=2),
)
self.layer3 = nn.Sequential(
nn.Conv2d(32, 64, kernel_size=(3, 3)),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True)
)
self.layer4 = nn.Sequential(
nn.Conv2d(64, 128, kernel_size=(3, 3)),
nn.BatchNorm2d(128),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=2, stride=2)
)
self.fc = nn.Sequential(
nn.Linear(128 * 4 * 4, 1024),
nn.ReLU(inplace=True),
nn.Linear(1024, 128),
nn.Linear(128, 10)
)
def forward(self, x):
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
x = x.view(x.size(0), -1)
x = self.fc(x)
return x
os.environ["KMP_DUPLICATE_LIB_OK"] = "TRUE"
data_tf = transforms.Compose(
[transforms.ToTensor(),
transforms.Normalize([0.5], [0.5])]
)
train_dataset = torchvision.datasets.MNIST(root='F:/机器学习/pytorch/书/data/mnist', train=True,
transform=data_tf, download=True)
test_dataset = torchvision.datasets.MNIST(root='F:/机器学习/pytorch/书/data/mnist', train=False,
transform=data_tf, download=True)
batch_size = 100
train_loader = torch.utils.data.DataLoader(
dataset=train_dataset, batch_size=batch_size
)
test_loader = torch.utils.data.DataLoader(
dataset=test_dataset, batch_size=batch_size
)
model = CNN()
model = model.cuda()
criterion = nn.CrossEntropyLoss()
criterion = criterion.cuda()
optimizer = torch.optim.Adam(model.parameters())
# 节约时间,三次够了
iter_step = 3
loss1 = []
loss2 = []
for step in range(iter_step):
loss1_count = 0
loss2_count = 0
for images, labels in train_loader:
images = images.cuda()
labels = labels.cuda()
images = images.reshape(-1, 1, 28, 28)
output = model(images)
pred = output.squeeze()
optimizer.zero_grad()
loss = criterion(pred, labels)
loss.backward()
optimizer.step()
_, pred = torch.max(pred, 1)
loss1_count += int(torch.sum(pred == labels)) / 100
# 测试
else:
test_loss = 0
accuracy = 0
with torch.no_grad():
for images, labels in test_loader:
images = images.cuda()
labels = labels.cuda()
pred = model(images.reshape(-1, 1, 28, 28))
_, pred = torch.max(pred, 1)
loss2_count += int(torch.sum(pred == labels)) / 100
loss1.append(loss1_count / len(train_loader))
loss2.append(loss2_count / len(test_loader))
print(f'第{step}次训练:训练准确率:{loss1[len(loss1)-1]},测试准确率:{loss2[len(loss2)-1]}')
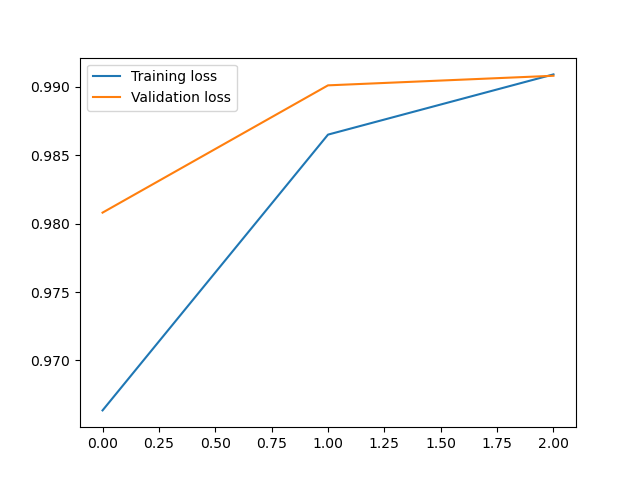
plt.plot(loss1, label='Training loss')
plt.plot(loss2, label='Validation loss')
plt.legend()
输出:
第0次训练:训练准确率:0.9646166666666718,测试准确率:0.9868999999999996
第1次训练:训练准确率:0.9865833333333389,测试准确率:0.9908999999999998
第2次训练:训练准确率:0.9917000000000039,测试准确率:0.9879999999999994
<matplotlib.legend.Legend at 0x21f03092fd0>
卷积神经网络中nn.Conv2d()和nn.MaxPool2d()以及卷积神经网络实现minist数据集分类的更多相关文章
- tf.nn.conv2d。卷积函数
tf.nn.conv2d是TensorFlow里面实现卷积的函数,参考文档对它的介绍并不是很详细,实际上这是搭建卷积神经网络比较核心的一个方法,非常重要 tf.nn.conv2d(input, fil ...
- 【TensorFlow】tf.nn.conv2d是怎样实现卷积的?
tf.nn.conv2d是TensorFlow里面实现卷积的函数,参考文档对它的介绍并不是很详细,实际上这是搭建卷积神经网络比较核心的一个方法,非常重要 tf.nn.conv2d(input, fil ...
- TF-卷积函数 tf.nn.conv2d 介绍
转自 http://www.cnblogs.com/welhzh/p/6607581.html 下面是这位博主自己的翻译加上测试心得 tf.nn.conv2d是TensorFlow里面实现卷积的函数, ...
- tf.nn.conv2d 参数介绍
tf.nn.conv2d是TensorFlow里面实现卷积的函数,参考文档对它的介绍并不是很详细,实际上这是搭建卷积神经网络比较核心的一个方法,非常重要 tf.nn.conv2d(input, fil ...
- Pytorch本人疑问(1) torch.nn和torch.nn.functional之间的区别
在写代码时发现我们在定义Model时,有两种定义方法: torch.nn.Conv2d()和torch.nn.functional.conv2d() 那么这两种方法到底有什么区别呢,我们通过下述代码看 ...
- AI芯片:高性能卷积计算中的数据复用
随着深度学习的飞速发展,对处理器的性能要求也变得越来越高,随之涌现出了很多针对神经网络加速设计的AI芯片.卷积计算是神经网络中最重要的一类计算,本文分析了高性能卷积计算中的数据复用,这是AI芯片设计中 ...
- 深度学习原理与框架-Tensorflow卷积神经网络-卷积神经网络mnist分类 1.tf.nn.conv2d(卷积操作) 2.tf.nn.max_pool(最大池化操作) 3.tf.nn.dropout(执行dropout操作) 4.tf.nn.softmax_cross_entropy_with_logits(交叉熵损失) 5.tf.truncated_normal(两个标准差内的正态分布)
1. tf.nn.conv2d(x, w, strides=[1, 1, 1, 1], padding='SAME') # 对数据进行卷积操作 参数说明:x表示输入数据,w表示卷积核, stride ...
- tf入门-tf.nn.conv2d是怎样实现卷积的?
转自:https://blog.csdn.net/mao_xiao_feng/article/details/78004522 实验环境:tensorflow版本1.2.0,python2.7 介绍 ...
- Pytorch中nn.Conv2d的用法
Pytorch中nn.Conv2d的用法 nn.Conv2d是二维卷积方法,相对应的还有一维卷积方法nn.Conv1d,常用于文本数据的处理,而nn.Conv2d一般用于二维图像. 先看一下接口定义: ...
- tf.nn.conv2d卷积函数之图片轮廓提取
一.tensorflow中二维卷积函数的参数含义:def conv2d(input, filter, strides, padding, use_cudnn_on_gpu=True, data_for ...
随机推荐
- LLaMA 3 源码解读-大语言模型5
本来不是很想写这一篇,因为网上的文章真的烂大街了,我写的真的很有可能没别人写得好.但是想了想,创建这个博客就是想通过对外输出知识的方式来提高自身水平,而不是说我每篇都能写得有多好多好然后吸引别人来看. ...
- 几种常见Ruby on Rails内置方法介绍
Ruby on Rails是一个功能强大的WEB开发框架,在这里我们将会学到一些经常用到的Ruby on Rails内置方法,帮助大家熟练掌握其应用技巧. Ruby on Rails自动生成文档技巧大 ...
- 案例-java贪吃蛇(附源码)
创建屏幕 开始游戏的窗口,首先引入窗口,然后在窗口画布上进行添加各类动画. JFrame frame=new JFrame("My SnakeGame"); Jframe 是个类, ...
- jquery中.html(),.text()和.val()的差异总结
.html(),.text(),.val()三种方法都是用来读取选定元素的内容: .html()是用来读取元素的html内容(包括html标签): .text()用来读取元素的纯文本内容,包括其后代元 ...
- margin-bottom:-1px无效的问题
在实现tab的时候,margin-bottom:-1px无效的问题 active的tab项,要指定他的border-top, 如: border-top: 1px solid #fff; border ...
- JDK源码阅读-------自学笔记(十四)(java.util.Calendar日历类)
Calendar 提供了关于日期计算的相关功能,比如:年.月.日.时.分.秒的展示和计算. GregorianCalendar 是 Calendar 的一个具体子类,提供了世界上大多数国家/地区使用的 ...
- 通过 OpenAPI 部署 Nbsf_Management API Service
目录 文章目录 目录 准备 部署 启动 API 服务 调用 准备 GentOS7 Golang1.12.5 Swagger YAML TS29521_Nbsf_Management.yaml TS29 ...
- 整理C语言预处理过程语法的实用方法与技巧
预处理 目录 预处理 一.宏定义 数值宏常量 字符串宏常量 用define宏定义注释符号? 程序的编译过程 预处理中宏替换和去注释谁先谁后? 如何写一个不会出现问题的宏函数 do-while-zero ...
- ffmpeg之视频(avc+aac)无损转mp4(批处理,拖放)
很多能够无损转视频的工具都来自命令行的ffmpeg版本,本文将介绍如何简单的批处理方法(直接拖放到bat文件上)来实现无损转视频. 工具/原料 ffmpeg(默认的static版本) 方法/步骤 ...
- docker安装Kafka(windows版)
windows环境安装docker参考安装docker桌面版(Windows) 这一步如果出现报错的话可以直接输入wsl -l -v命令来查看当前Ubuntu的wsl版本 安装Kafka需要先安装 z ...