【C#上位机】西门子1200PLC实用定位控制程序案例
1. 引言
新阁教育这篇文章是一篇综合性非常强的文章,从PLC输入输出及步进电机接线开始,到PLC运动控制程序编写,再到后续的ModbusTCP通信协议及上位机编程实现最终控制,涉及知识面比较广,能够让我们很好地将所学知识结合起来。【dotNet工控上位机:thinger_swj】
2. 项目开发平台
采用西门子TIA Portal V15编程软件编写运动控制程序,实现PLC(S7-1200系列:CPU1214C DC/DC/DC )对步进电机的控制,再通过编写ModbusTCP程序,将控制地址进行映射,从而方便上位机(VS 2019开发)与PLC进行通信,最终实现步进电机的运动方向、速度及距离的灵活控制。
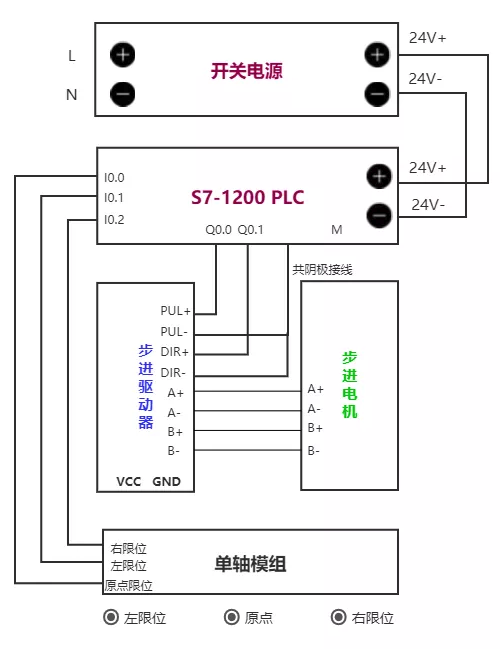
涉及硬件:开关电源、S7-1200PLC、步进驱动器、步进电机、单轴模组、限位开关
涉及软件:TIA Portal V15、VS2019、ModbusPoll(用于测试通信)
3. 硬件接线
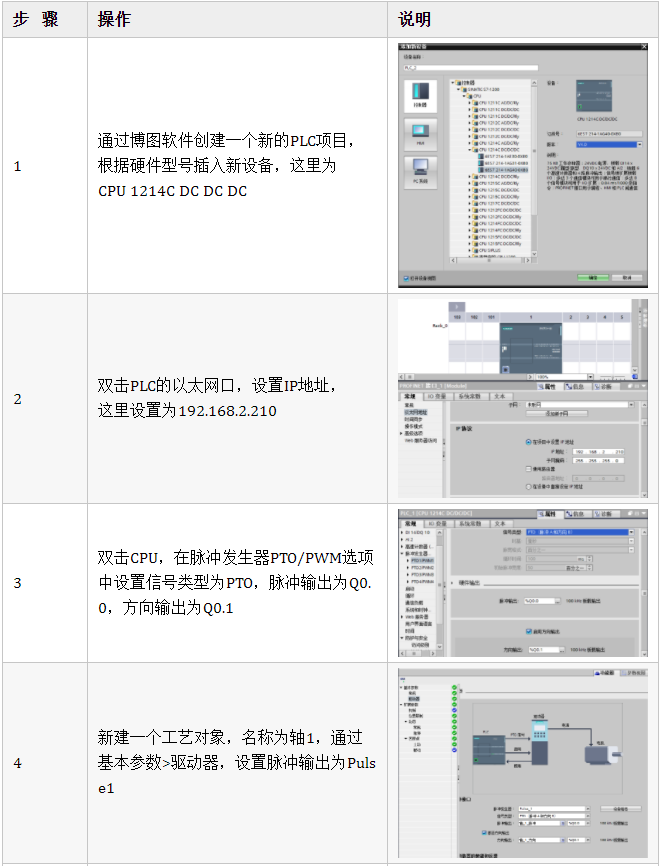
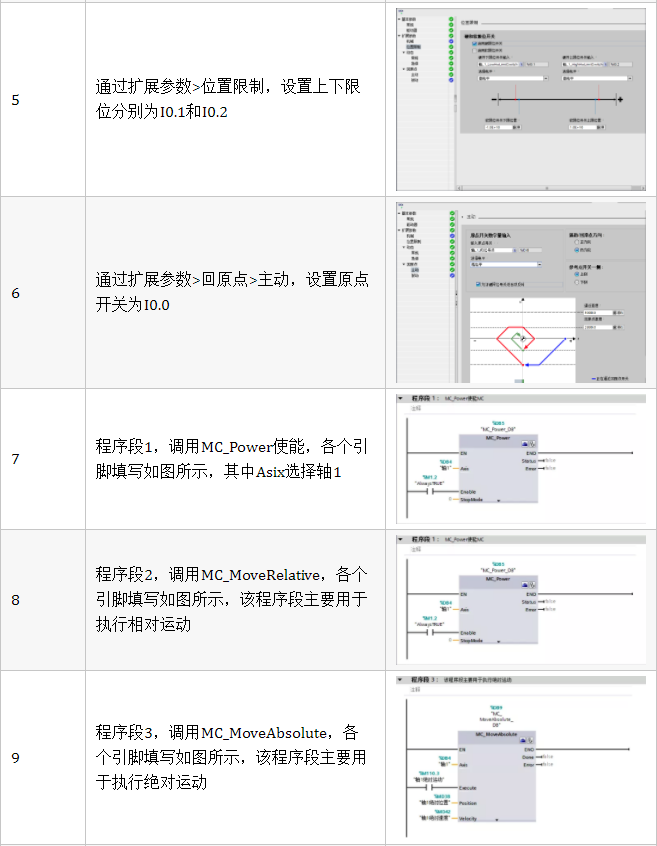
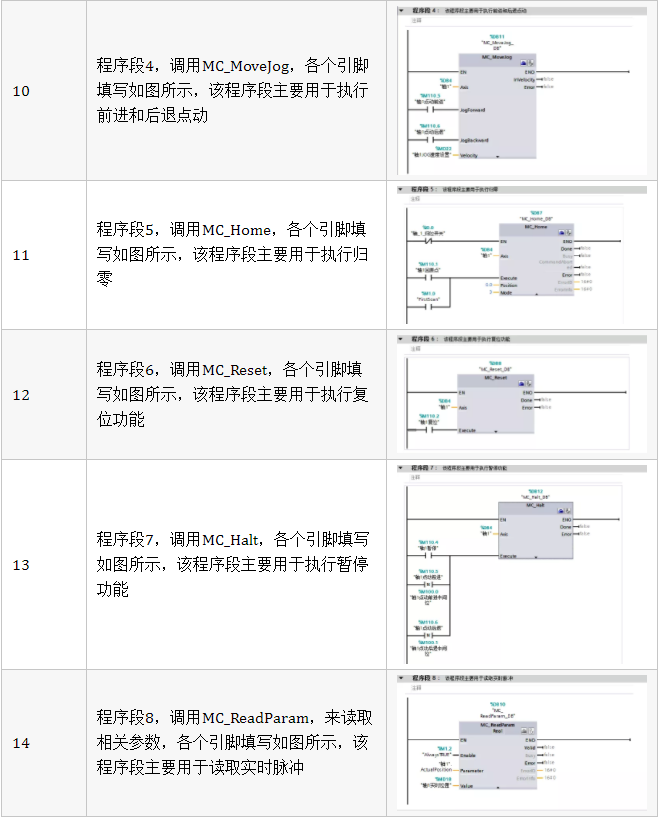
4. PLC编程
5. 上位机开发思路
目前比较主流开发上位机的方式,主要是组态软件(触摸屏)、C#开发上位机,C#开发上位机与传统的组态软件之间的区别,主要体现在如下三个方面:
- 功能限制:组态软件对于一些特定的需求或者逻辑,会有一定的局限性,使用上也受到软件本身的约束;C#开发上位机完全自主开发,几乎不存在功能上的限制,并且扩展方便。
- 技术要求:组态软件最大的优势在于方便,因为它本身都集成了一些通用协议和元件,只需要按照使用说明进行组态配置即可;C#开发需要完全自己搭建框架和实现底层代码,对开发者的技术要求会更高一些。
- 价格成本:组态软件需要按套、按点位收费,意味着每个项目无形中都有一个基础成本;C#开发上位机自主开发,不需要二次授权费用,并且开发一套之后,可以快速应用到其他项目中。
采用C#上位机开发,首先需要考虑的是通信问题。西门子S7-1200支持很多种不同的通信协议,包括S7、ModbusTCP、TCP/IP、UDP、OPC等,从开发成本上来说,我们优先考虑S7和ModbusTCP,对于S7和ModbusTCP通信协议,比较一下两者的优缺点:
- S7协议为西门子内部协议,协议本身不公开,需要调用或者自己开发通信库,使用S7通信协议需要勾选CPU中的允许来自远程对象的PUT/GET通信访问。
- ModbusTCP为公开、免费协议,可以自己开发通信库或者使用开源库,使用ModbusTCP通信协议需要编写一定的PLC程序来实现地址映射。
从公开免费和使用范围的角度来考虑,这里采用ModbusTCP通信协议,因为学会了ModbusTCP,意味着市场上的大部分仪表、PLC通信都可以搞得定,PLC程序编写如下如下所示:
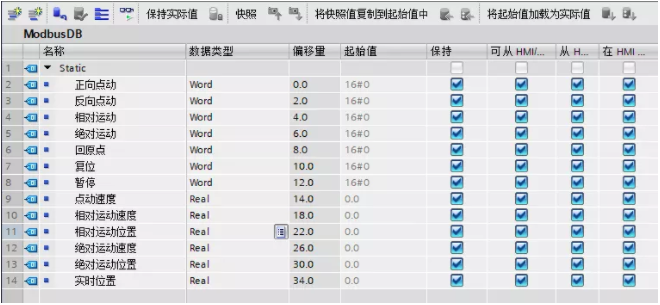
- 创建DB块
这里首先创建一个DB块,里面包含了常用的一些操作和参数设置,值得注意的是,由于Modbus保持型寄存器的Bit位操作比较麻烦,因此这里我们统一使用Word类型来代替Bit。
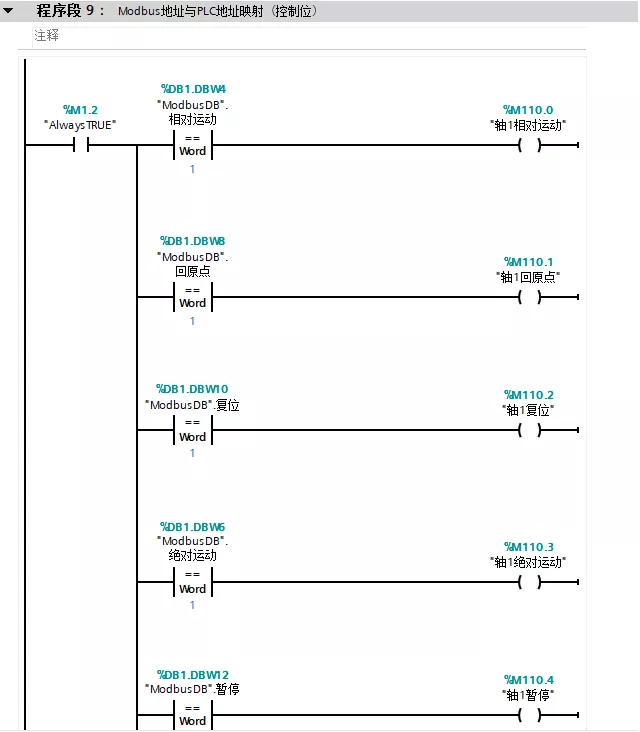
- Modbus地址与PLC地址的映射(控制位)
Modbus地址与PLC地址的映射(参数地址)

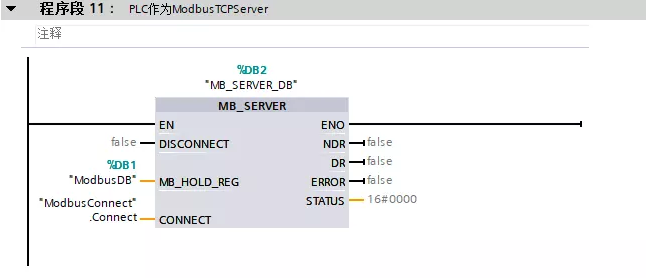
ModbusServer程序编写
上位机UI界面设计

- ModbusTCP通信库
上位机开发功能实现的核心在于ModbusTCP通信库编写,由于Modbus协议是公开免费,可以自己根据Modbus协议来开发,也可以使用开源的Modbus库,如NModbus等,有了ModbusTCP通信库之后,我们可以将更多的精力放在业务处理及逻辑处理上面。
6. 上位机功能开发
- 首先创建一个Windows窗体应用项目,项目名称为thinger.com.MotionPro。
- 日志显示功能:日志显示采用ListView进行显示,绑定一个ImageList用来区分信息、报警、错误,添加日志方法的参数包含日志等级及日志内容。
- 自己开发ModbusTCP通信库或者使用开源库,该库应该具备建立连接、断开连接、预置寄存器、读取寄存器的功能。
- 建立连接和断开连接:这里通过按钮实现建立连接和断开连接2个功能。
- 相对位置运动:设置相对运动速度和相对运动位置,实现电机的相对运动。
- 绝对位置运动:设置绝对运动速度和绝对运动位置,实现电机的相对运动。
- 点动运动模式:设置点动运动速度,按住正向点动或者反向点动,实现电机的点动运动。
- 回原点模式:点击回原点,可以控制物体回到原点位置并停止。
- 运动停止、运动暂停、复位相关功能。
7. 写在最后
这个项目整体来说难度不是很大,但是涉及的知识面比较广,非常适合上位机初学者进行学习和练手。【dotNet工控上位机:thinger_swj】
【C#上位机】西门子1200PLC实用定位控制程序案例的更多相关文章
- 上位机C#通过OPCUA和西门子PLC通信
写在前面: 很多人在学习OPCUA的时候,有个非常苦恼的问题,就是没有OPCUA服务器的环境,这时候,有些人可能会想到通过类似于KepServer这样的软件来实现.那么,有没有一种方式,实现快速搭建O ...
- 上位机开发之西门子PLC-S7通信实践
写在前面: 就目前而言,在中国的工控市场上,西门子仍然占了很大的份额,因此对于上位机开发而言,经常会存在需要与西门子PLC进行通信的情况.然后对于西门子PLC来说,通信方式有很多,下面简单列举一下: ...
- 【精讲版】上位机C#/.NET与西门子PLC通信
618来啦 亲们,腾讯课堂101机构打榜了,快来助力<新阁教育>,<免费赠送课程>! 1.手机QQ(微信请也来一遍)扫下方二维码↓,找到<新阁教育> 2.点击“支持 ...
- 【新阁教育】基于ModbusTCP实现西门子1200PLC定位控制案例
1. 引言 今天新阁教育给大家分享一个<基于ModbusTCP实现西门子1200PLC定位控制案例>,从PLC输入输出及步进电机接线开始,到PLC运动控制程序编写,再到后续的ModbusT ...
- [自娱自乐] 4、超声波测距模块DIY笔记(四)——终结篇·基于C#上位机软件开发
前言 上一节我们已经基本上把超声波硬件的发射和接收模块全部做好了,接下来我们着手开发一个软硬结合的基于C#的平面定位软件! 目录 一.整体思路 二.效果提前展示 2-1.软件部分展示 2-2.硬件部分 ...
- 【安富莱专题教程第4期】SEGGER的J-Scope波形上位机软件,HSS模式简单易用,无需额外资源,也不需要写目标板代码
说明:1.在实际项目中,很多时候,我们需要将传感器或者ADC的数值以波形的形式显示.通常的解决办法是用串口上位机,USB接口上位机或者MDK的逻辑分析仪功能,使用这三种方式都比较繁琐.本期专题为大家讲 ...
- LabVIEW上位机与串口通信
渊源 大一的时候,学校开了门公共选修课,叫LabVIEW编程,当时的我当然还不知道LabVIEW是啥东东,但还是选了.上课的老师是机械学院的一个副教授.他给我们展示了好几个用LabVIEW做的项目.譬 ...
- (原创)使用C#开发高性能PLC上位机监控系统服务器应用程序
PLC服务器监控系统的特点: 1·使用微软C#面向对象开发语言开发应用程序.2·使用了健壮性与性能良好的SUPER SOCKET服务器通信框架,实现自定义应用层通信协议,支持多台PC客户端访问服务器, ...
- (原创)如何搭建PLC+上位机监控系统达到成本的最小化?
以西门子PLC举例; 西门子PLC有几个型号:S7-200SMART,S7-1200,S7-300,S7-400,S7-1500,价格从低到高. 1个项目中要求的IO数量:600点的DI+DO,若干个 ...
- .net全栈开发-c#面向对象与工控自动化分拣上位机
一.前言 开始做了两年web.期间也整了一段时间winform.后来做了两年工控上位机,也就是做工控这两年发现机器跟面向对象真是如此贴切,也是我从处理数据和流程的思维转变为面向对象思维的开始.这对我后 ...
随机推荐
- 深入理解String
深入理解String String是Java中的一个类,是一个引用类型,用于表示字符串.它是不可变的(immutable),即一旦创建,其值就不能被修改.任何对String对象的修改操作都会创建一个新 ...
- 【webserver 前置知识 01】Linux系统编程入门
题外话,PA里面也有很不错的Linux基础基础 传送门:https://nju-projectn.github.io/ics-pa-gitbook/ics2019/linux.html 静态库与动态库 ...
- 第123篇: JS函数属性与方法
好家伙,本篇为<JS高级程序设计>第十章"函数"学习笔记 ECMAScript 中的函数是对象,因此有属性和方法. 1.函数属性 每个函数都有两个属性:length 和 ...
- kafka节点故障恢复原理
Kafka的LEO和HW LEO LEO是Topic每一个副本的最后的偏移量offset+1 HW(高水位线) High WaterMark是所有副本中,最小的LEO Follower副本所在节点宕机 ...
- 【Azure Developer】在Azure Storage Account的两个Blob可以同步吗?可以跨订阅拷贝吗?
问题描述 不同订阅下的Azure Storage Account中Blob资源可以同步吗? 解决方案 可以.通过Azure 官方推荐的Storage Account工具来完成 Copy/Paste 操 ...
- Java -----多线程 创建线程的方式三: 实现Callable接口----JDK 5.0 新增
1 package bytezero.thread2; 2 3 import java.util.concurrent.Callable; 4 import java.util.concurrent. ...
- jquery ui autocomplete ajax返回数据自定义显示
1.body里面的内容 <input type="text" class="inputTxt" id="txtJigou" autoc ...
- Java开发者的Python快速进修指南:掌握T检验
前言 T检验是一种用于比较两个独立样本均值差异的统计方法.它通过计算T值和P值来判断样本之间是否存在显著性差异.通常情况下,我们会有两组数据,例如一组实验组和一组对照组. T检验的原假设是两组样本的均 ...
- Mysql 增删改查语言系列
Mysql 数据语言系列 目录 Mysql 数据语言系列 一.数据定义语言 DDL 1 数据库规范 2 DDL 语言使用 2 创建视图 二. 数据操纵语言 DML 1 插入语法 2 更新语法 3 删除 ...
- Zabbix6.0使用教程 (五)—zabbix从二进制包安装上篇
大家好,我是乐乐.上一期我们已经讲过从源代码安装zabbix,本期着重讲从二进制包安装zabbix. 当我们在ZABBIX官方存储库可以看到,Zabbix SIA 提供如下官方RPM和DEB包: ·R ...