MM32F0140 GPIO驱动LED灯(MM32F0140 GPIO)
目录:
1.MM32F0140简介
2.MM32F0140系统时钟配置
3.MM32F0140的GPIO外设配置及其初始化
4.使用官网的Systick定时器做延时
5.MM32F0140 GPIO驱动LED灯
提要:
本实例学习MM32F0140的GPIO外设的配置,配置PA11、PB3、PB4、PB5为推挽输出模式驱动LED1~LED4灯翻转,每隔1s时间(使用官网的Systick延时)翻转1次LED灯的状态。
内容:
1、MM32F0140简介:
(1)MM32F0140微控制器是基于Arm Cortex-M0内核,最高工作频率可达72MHz;
(2)供电电压支持:2.0V - 5.5V;
(3)多达64KB的Flash,8KB的SRAM;
(4)1个I2C;
(5)3个UART;
(6)1个12位共13通道的ADC;
(7)2个I2C或I2S;
(8)1个16位高级定时,1个16位和1个32位的通用定时器,3个16位的基本定时器;
(9)1个FlexCAN接口;
(10)1个IWDG和1个WWDG看门狗。
2.MM32F0140系统时钟配置:
如下图1所示,1.MM32F0140可以使用外部HSE 8M时钟倍频到72M作为系统时钟,2.也可使用内部HSI 8M时钟倍频到72M作为系统时钟,二者选择其1,选择打开对应的时钟宏即可,本实例选择2开启HSI 8M倍频到72M时钟作为MM32F0140的系统时钟。
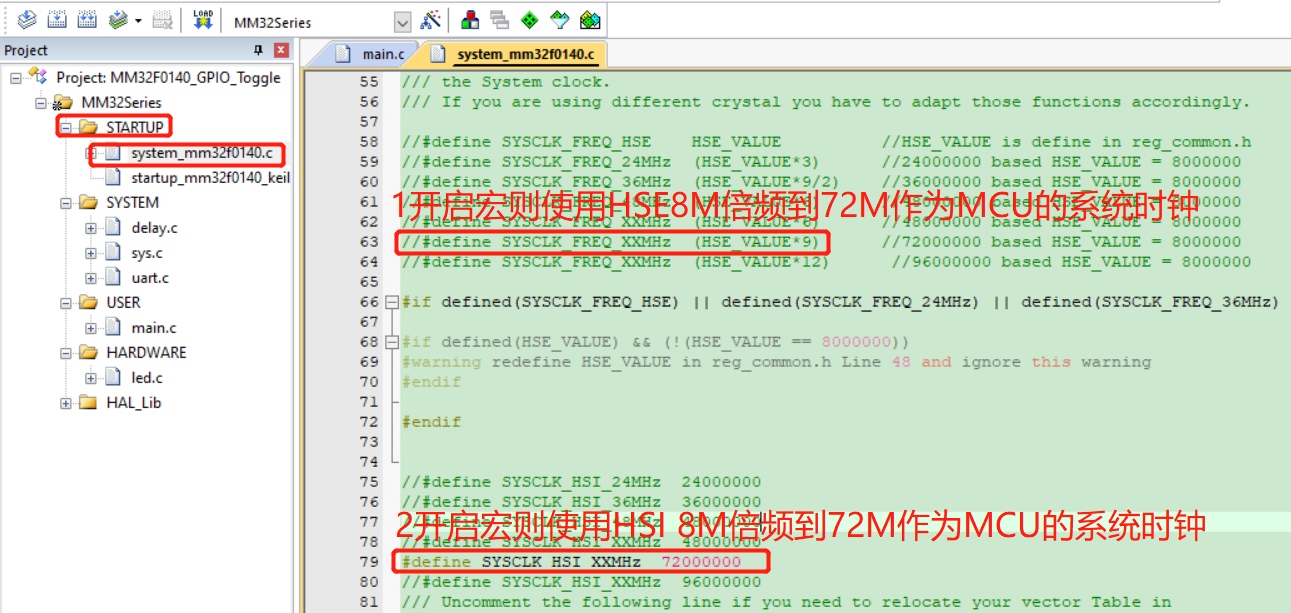
图1
3.MM32F0140的GPIO外设配置及其初始化:
MM32F0140每个外设都有其对应的时钟,在使用外设前应先配置使能其外设时钟,本实例使用GPIOA和GPIOB外设的PA11、PB3、PB4、PB5驱动LED灯每隔1s翻转1次做LED灯的1s闪烁实验
具体配置步骤,及其初始化如下:
(1)使能GPIOA和GPIOB的外设时钟;
(2)配置IO的管脚;
(3)配置GPIO的输出速度;
(4)配置IO管脚的工作模式;
(5)根据GPIOA、GPIOB配置的参数整体初始化GPIOA和GPIOB各管脚的成员参数。
使用宏定义定义GPIOA的PA11,GPIOB的PB3、PB4、PB5驱动LED1~LED4代码如下,使用宏定义方便代码维护,需要更换GPIO端口或管脚时只需在宏定义中修改对应的端口GPIOx和GPIO_Pin_x即可;
#define LED1_PORT GPIOA
#define LED1_PIN GPIO_Pin_11
#define LED2_PORT GPIOB
#define LED2_PIN GPIO_Pin_3
#define LED3_PORT GPIOB
#define LED3_PIN GPIO_Pin_4
#define LED4_PORT GPIOB
#define LED4_PIN GPIO_Pin_5 #define LED1_ON() GPIO_ResetBits(LED1_PORT,LED1_PIN)
#define LED1_OFF() GPIO_SetBits(LED1_PORT,LED1_PIN)
#define LED1_TOGGLE() (GPIO_ReadOutputDataBit(LED1_PORT,LED1_PIN))?(GPIO_ResetBits(LED1_PORT,LED1_PIN)):(GPIO_SetBits(LED1_PORT,LED1_PIN)) #define LED2_ON() GPIO_ResetBits(LED2_PORT,LED2_PIN)
#define LED2_OFF() GPIO_SetBits(LED2_PORT,LED2_PIN)
#define LED2_TOGGLE() (GPIO_ReadOutputDataBit(LED2_PORT,LED2_PIN))?(GPIO_ResetBits(LED2_PORT,LED2_PIN)):(GPIO_SetBits(LED2_PORT,LED2_PIN)) #define LED3_ON() GPIO_ResetBits(LED3_PORT,LED3_PIN)
#define LED3_OFF() GPIO_SetBits(LED3_PORT,LED3_PIN)
#define LED3_TOGGLE() (GPIO_ReadOutputDataBit(LED3_PORT,LED3_PIN))?(GPIO_ResetBits(LED3_PORT,LED3_PIN)):(GPIO_SetBits(LED3_PORT,LED3_PIN)) #define LED4_ON() GPIO_ResetBits(LED4_PORT,LED4_PIN)
#define LED4_OFF() GPIO_SetBits(LED4_PORT,LED4_PIN)
#define LED4_TOGGLE() (GPIO_ReadOutputDataBit(LED4_PORT,LED4_PIN))?(GPIO_ResetBits(LED4_PORT,LED4_PIN)):(GPIO_SetBits(LED4_PORT,LED4_PIN))
MM32F0140 GPIOA和GPIOB的外设配置及其IO的初始化,即PA11、PB3、PB4、PB5驱动LED1~LED4的初始化配置步骤如下代码所示:
void Bsp_LED_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
//Enable GPIOA Clock
RCC_AHBPeriphClockCmd(RCC_AHBENR_GPIOA, ENABLE);
//Enable GPIOB Clock
RCC_AHBPeriphClockCmd(RCC_AHBENR_GPIOB, ENABLE); //Init struct member with its default value.
GPIO_StructInit(&GPIO_InitStruct);
//PA11:LED1
GPIO_InitStruct.GPIO_Pin = LED1_PIN;
//GPIO Speed
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
//Push-pull output
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;
//Initializes the gpio peripheral according to the specified parameters in the init struct.
GPIO_Init(LED1_PORT, &GPIO_InitStruct); //PB3:LED2,PB4:LED3,PB5:LED4
GPIO_InitStruct.GPIO_Pin = LED2_PIN | LED3_PIN | LED4_PIN;
//GPIO Speed
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
//Push-pull output
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;
//Initializes the gpio peripheral according to the specified parameters in the init struct.
GPIO_Init(LED2_PORT, &GPIO_InitStruct); LED1_OFF();
LED2_OFF();
LED3_OFF();
LED4_OFF(); LED1_ON();
LED2_ON();
LED3_ON();
LED4_ON();
}
4.使用官网的Systick定时器做延时:
在main函数中调用Systick定时器初始化函数,作为LED1~LED4翻转闪烁延时,只需调用DELAY_Init();即可。
5.MM32F0140 GPIO驱动LED灯:
如下代码所示,在main函数中调用Systick定时器初始化函数DELAY_Init和LED初始化函数Bsp_LED_Init,在while(1)主循环中调用之前宏定义的LED1_TOGGLE ~ LED4_TOGGLE翻转功能,
然后调用DELAY_Ms(1000);即1s延时函数,则实现PA11、PB3、PB4、PB5每隔1s驱动翻转1次LED1~LED4灯的状态,实现LED1~LED4灯的闪烁。
int main(void)
{
//Systick Init
DELAY_Init();
//LED GPIO Init
Bsp_LED_Init(); while(1)
{
//LED1~LED4 Toggle
LED1_TOGGLE();
LED2_TOGGLE();
LED3_TOGGLE();
LED4_TOGGLE();
DELAY_Ms(1000);
}
}
总结:
本实例学习MM32F0140的GPIO外设的配置,配置PA11、PB3、PB4、PB5为推挽输出模式驱动LED1~LED4灯翻转,每隔1s时间(使用官网的Systick延时)翻转1次LED灯的状态。
注意事项:
(1)配置系统时钟为HSI 8M倍频到72M或使用HSE 8M倍频到72M时钟(开启对应的时钟宏即可,其它时钟频率也可添加自定义时钟宏)
(2)使用外设时比如GPIOA和GPIOB外设,需使能GPIOA和GPIOB的外设时钟。
MM32F0140 GPIO驱动LED灯(MM32F0140 GPIO)的更多相关文章
- MM32F0020 GPIO驱动LED灯(MM32F0020 GPIO Toggle)
目录: 1.MM32F0020简介 2.MM32F0020系统时钟配置 3.MM32F0020的GPIO外设配置及其初始化 4.使用官网的Systick定时器做延时 5.MM32F0020 GPIO驱 ...
- stm32开发笔记(三):stm32系列的GPIO基本功能之输出驱动LED灯、输入按键KEY以及Demo
前言 stm32系列是最常用的单片机之一,不同的版本对应除了引脚.外设.频率.容量等'不同之外,其开发的方法是一样的. 本章讲解使用GPIO引脚功能驱动LED灯和接收Key按钮输入. STM ...
- 灵动微电子ARM Cortex M0 MM32F0010 GPIO 的配置驱动LED灯
灵动微电子ARM Cortex M0 MM32F0010 GPIO的配置 目录: 1.前言 2.学习方法简要说明 3.要点提示 4.注意事项 5.MM32F0010系统时钟的配置 6.MM32F001 ...
- 树莓派 使用python来操作GPIO 控制LED灯
一.创建python驱动和控制GPIO 先新建一个文件夹用于放置脚本 mkdir python_gpio 进入文件夹内新建一个gpio_blink.py的脚本 cd python_gpio touch ...
- CC2530学习路线-基础实验-GPIO 控制LED灯亮灭(1)
目录 1.前期预备知识 1.1 新大陆ZigBee模块LED灯电路 1.2 CC2530相关寄存器 1.3 寄存器操作技巧 1.4 CPU空转延时 1.4 操作流程图 2.程序代码 The End 1 ...
- TMS320VC5509总线驱动LED灯
1. 重新建立的工程,需要添加宏定义才行 CHIP_5509 2. 驱动LED用的是74LVC573锁存器,LE高电平时,Q1=D0,LE低电平时,Q1=之前的状态,下面是数据总线 看下地址总线 看下 ...
- STM32之使用库函数驱动LED灯
一.熟悉GPIO结构体 以下这个结构体是我从官方手册中获取的: typedef struct { u16 GPIO_Pin; GPIOSpeed_TypeDef GPIO_Speed; GPIOMod ...
- 小结-stm32 驱动LED灯
使用位带操作,位带操作就是把每个比特膨胀成一个32位的字,当访问这些字的时候就访问这些比特位. http://www.cnblogs.com/xiaobo-Linux/ 然后,端口使能: //³õʼ ...
- 第7章 使用寄存器点亮LED灯
第7章 使用寄存器点亮LED灯 全套200集视频教程和1000页PDF教程请到秉火论坛下载:www.firebbs.cn 野火视频教程优酷观看网址:http://i.youku.com/fir ...
随机推荐
- 实用的linux 命令
1. 查看当前文件夹下文件或文件夹所占磁盘的大小 du -sh *|sort -rh 2. 查找某个进程号,脚本或程序所在目录的方法 ll /proc/进程id 3. awk 的用法 (1)累加: a ...
- Gulp自动化任务及nvm、npm常用命令
项目环境配置 nvm: node版本管理工具,安装和环境变量 cmd常用命令: · nvm use [version]: 切换至指定版本的node · nvm install no ...
- Elasticsearch(2) 数据搜索
本文介绍如何在Elasticsearch中对数据进行搜索. 1.简述 在Elasticsearch中的搜索中,有两类搜索: queries aggregations 区别在于:query可以进行全文搜 ...
- PostgreSQL源码编译
环境:Ubuntu 16.04+PostgresQL13.2 1.指定安装路径 ./configure --prefix=/opt/postgresql 2.编译安装 sudo make sudo m ...
- python--003 数据类型
运算符 in "heilo" in "adfsdfsdfsdfsdfdsfdshellofsdfdsf" "li" in ["l ...
- Firewalld工作区
firewalld的字符界面管理工具是 firewall-cmd firewalld默认配置文件有两个:/usr/lib/firewalld/ (系统配置,尽量不要修改)和 /etc/firewal ...
- Pandas中Series与Dataframe的区别
1. Series Series通俗来讲就是一维数组,索引(index)为每个元素的下标,值(value)为下标对应的值 例如: arr = ['Tom', 'Nancy', 'Jack', 'Ton ...
- 2、前端--初见前后端交互、CSS简介、基本选择器、组合选择器、属性选择器、分组与嵌套、伪类选择器
今日内容概要 初窥后端框架 css简介 css选择器 今日内容详细 初次体验前后端交互 # 代码无需掌握 只看效果即可 """后端框架:可以简单的理解为别人写好的一个非常 ...
- 基于XC7A100T的PCIe千兆电口以太网收发卡
一.板卡概述 本板卡采用Xilinx公司的Artix7系列的XC7A100T-2FGG484 芯片作为主处理器.包含双路千兆电口网络,双组DDR,PCIeX1 V1.1接口,板卡设计满足工业级要求. ...
- [入门到吐槽系列] Webix 10分钟入门 一 管理后台制作
前言 本人是服务端程序员,同时需要兼职前端开发.常用的就是原生态的HTML.Javascript,也用过ExtJS.Layui.可是ExtJS变公司后非常难用.Layui上手还行,用过一段时间,会觉得 ...