时间序列分析2.X AR与MA
ARMA与ARIMA模型
对平稳时间序列和非平稳时间序列,分别假定适当的 ARMA 模型和 ARIMA 模型
对非平稳时间序列建立 ARIMA 模型,实际上是通过先用适当的变换将非平稳序列转化为平稳序列,然后再建立 ARMA 模型
差分消除趋势性和季节性
将非平稳序列化为平稳序列的常见变换
- 趋势差分以消除趋势性
- 季节差分以消除季节性
- Box-Cox 变换以使得波动稳定化
趋势差分
\(y_{t}=x_{t}-x_{t-1}=\nabla x_{t}\)
季节差分
\(y_{t}=x_{t}-x_{t-s}=\nabla_{s} x_{t}\)
s 常取12
当序列同时有趋势性与周期性时,先趋势差分,再季节差分 \(z_{t}=\nabla_{12} y_{t}=\nabla_{12} \nabla x_{t}\)
对于波动随时间变化的序列变为平稳序列
- 先做适当的 Box-Cox 变换,使得其波动稳定化,然后再进行差分运算消除趋势性和季节性
- 先取对数,再趋势差分,最后季节差分
\(w_{t}=\nabla_{12} \nabla \ln x_{t}\)
平稳过程
弱平稳过程
定义
满足:
- \(E\left(X_{t}^{2}\right)<\infty\)
- \(E\left(X_{t}\right)\) 为常数
- \(\operatorname{Cov}\left(X_{t}, X_{t-k}\right)\) 与 \(t\) 无关, \(\forall k\)
即称为弱平稳过程
性质
- \(k=0, Var(X_t)=\sigma^2, \forall t\) (波动不会随时间变化)
- \(\forall s<t,\operatorname{Cov}(X_t,X_s)=\operatorname{Cov}(X_t,X_{t-(t-s)})\) 只与 \(t-s\) 有关
- \(\operatorname{Corr}(X_t,X_s)\) 两点相关性只与间隔有关.(由此可以用昨天到今天的规律,根据今天的情况预测明天)
白噪声过程
满足:
- \(E\left(X_{t}\right)=\mu~, \forall t\)
- \(\operatorname{Var}\left(X_{t}\right)=\sigma^{2}~, \forall t\)
- \(\operatorname{Cov}\left(X_{t}, X_{s}\right)=0~, \forall t \neq s\)
- 不必相互独立
称为白噪声过程, \(Z_{t} \sim W N\left(0, \sigma_{Z}^{2}\right)\)
性质
- 满足 \(\rho_k=0,~\forall k\geq1\) ,即无序列相关性
随机漫步(RW)
随机漫步
定义
如果 \(X_{t}=X_{t-1}+Z_{t}\)
经过地推可以得到 \(X_{t}=X_{0}+Z_{1}+Z_{2}+\cdots+Z_{t}\)
性质
假设 \(X_0=0\), 对于随机漫步而言,
\[E\left(X_{t}\right)=0 ; \operatorname{Var}\left(X_{t}\right)=t \sigma_{Z}^{2}
\]与 \(t\) 有关, 故不是平稳过程
带漂移项的随机漫步
定义
如果 \(X_{t}=\mu+X_{t-1}+Z_{t}\)
经过推导可得
\[X_{t}=X_{0}+t \mu+\sum_{i=1}^{t} Z_{i}
\]
性质
假设 \(X_0=0\), 对于带漂移项的随机漫步而言,
\[E\left(X_{t}\right)=t\mu ; \operatorname{Var}\left(X_{t}\right)=t \sigma_{Z}^{2}
\]与 \(t\) 有关, 故不是平稳过程
ACF 及序列相关性的度量
ACF
延迟 k 自协方差函数
\(\gamma_{X}(k)=\operatorname{Cov}\left(X_{t}, X_{t-k}\right)\)
延迟 k 自相关函数
\[\rho(k)=\frac{\gamma_{X}(k)}{\gamma_{X}(0)}
\]\(\rho(k)\) 常记作 \(\rho_k\)
ACF性质
- \(\rho(0)=1\)
- \(\rho(-k)=\rho(k)\)
- \(|\rho(k)|\leq 1\)
样本自相关函数
间隔 k 的相关系数
\[\hat{\rho}_{k}=\frac{\hat{\gamma}_k}{\hat{\gamma}_0}= \frac{\sum_{t=1}^{T-k}\left(x_{t}-\bar{x}\right)\left(x_{t+k}-\bar{x}\right)}{\sum_{t=1}^{T}\left(x_{t}-\bar{x}\right)^{2}}
\]
自相关图
以延迟阶数 \(k\) 为横坐标, \(\hat{\rho}_k\) 为纵坐标绘图
AR自回归模型
\(p\) 阶自回归过程 \(AR(p)\)
满足 \(X_{t}=\phi_{1} X_{t-1}+\phi_{2} X_{t-2}+\cdots+\phi_{p} X_{t-p}+Z_{t}\) 的平稳的 \(\{X_t\}\) 称为
(中心化的) \(p\) 阶自回归过程, 记为 \(AR(p)\)
一般的 \(AR(p)\) 可以表示为 \(X_{t}-\mu=\phi_{1}\left(X_{t-1}-\mu\right)+\phi_{2}\left(X_{t-2}-\mu\right)+\cdots+\phi_{p}\left(X_{t-p}-\mu\right)+Z_{t}\)
其可以等价展开成 \(X_{t}=\phi_{0}+\phi_{1} X_{t-1}+\phi_{2} X_{t-2}+\cdots+\phi_{p} X_{t-p}+Z_{t}\) ,
其中 \(\phi_{0}=\mu(1-\phi_1-\cdots-\phi_p)\)
\(AR(1)\)
模型样式
\(X_t=\phi X_{t-1}+Z_t\)
性质
由于 \(\{X_t\}\) 与 \(\{X_t-\mu\}\) 有相同的方差与协方差, 故我们可以令 \(\mu=0\)
容易验证,当 \(\phi<1\) 时,
对模型重复进行迭代, 我们有
\[\begin{aligned}
X_{t} &=\phi\left(\phi X_{t-2}+Z_{t-1}\right)+Z_{t}=\phi^{2} X_{t-2}+\phi Z_{t-1}+Z_{t} \\
&=\phi^{2}\left(\phi X_{t-3}+Z_{t-2}\right)+\phi Z_{t-1}+Z_{t}=\phi^{3} X_{t-3}+\phi^{2} Z_{t-2}+\phi Z_{t-1}+Z_{t}\\
&=\cdots
\end{aligned}
\]
一直进行下去,如果 \(|\phi|<1\) 容易验证其为平稳序列, 且其ACF函数为
\[\gamma_{X}(k)=\sum_{i=0}^{\infty} \phi^{i} \phi^{i+k}= \frac{\phi^{k}}{1-\phi^{2}}
\]Xt 可以表示为当前和过去时刻扰动的收敛线性组合,即 \(MA(\infty)\) 形式,此时称 Xt 是因果过程。我们也可以得出结论: \(AR(1)\) 是因果平稳的充要条件是 \(|\phi|<1\)
期望与ACF
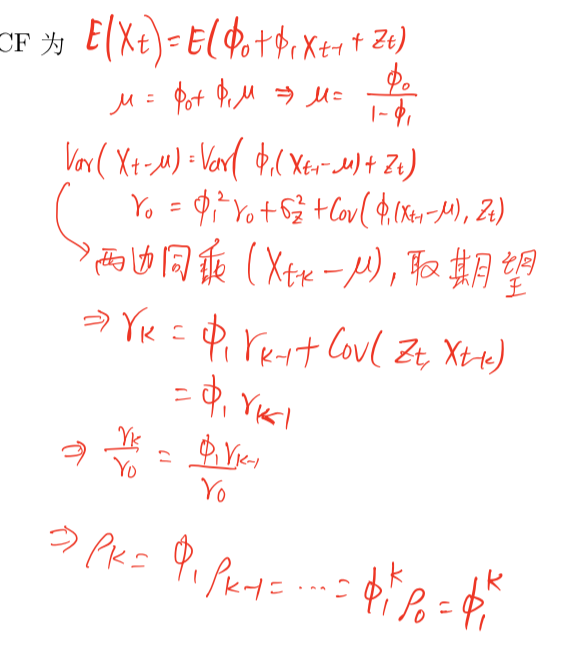
\(AR(2)\)
模型表示
\[\begin{array}{c}
X_{t}=\phi_{1} X_{t-1}+\phi_{2} X_{t-2}+Z_{t} \\
\left(1-\phi_{1} B-\phi_{2} B^{2}\right) X_{t}=Z_{t}
\end{array}\]
因果平稳条件
\[\phi(B)=1-\phi_{1} B-\phi_{2} B^{2}=\left(1-\pi_{1} B\right)\left(1-\pi_{2} B\right)
\]\(\pi_1\) , \(\pi_2\) 为 \(\phi(B)=0\) 的两个根的倒数
令 \((1-\pi_2B)X_t=Y_t\) , 有 \((1-\pi_1B)Y_t=Z_t\)
当 \(|\pi_1|<1\) , \(\{Y_t\}\) 为因果平稳过程
当 \(|\pi_2|<1\) , \(X_t\) 可表示为 $$X_{t}=\sum_{j=0}^{\infty} \pi_{2}^{j} Y_{t-j}$$
也为因果平稳过程
所以, AR(2) 为因果平稳过程的条件是 \(\phi(B)=0\) 的两个根在单位圆外, 即 \(|\pi_1|<1\) , \(|\pi_2|<1\)
ACF
\(X_{t}=\phi_{1} X_{t-1}+\phi_{2} X_{t-2}+Z_{t}\) (为方便研究, 无妨设 \(\mu=0\))
两边同时乘以 \(X_{t-k}\) 并取期望
有 \(\gamma_{k}=\phi_{1} \gamma_{k-1}+\phi_{2} \gamma_{k-2}\)
再两边同除以 \(\gamma_{0}\) , 可得到
\(\rho_{k}=\phi_{1} \rho_{k-1}+\phi_{2} \rho_{k-2}, \forall k>0\)
令 \(k=1\), 利用 \(\rho_{-1}=\rho_{1}, \rho_{0}=1\), 有
\[\rho_1=\phi_1\rho_0+\phi_2\rho_1 \Rightarrow \rho_1=\phi_1+\phi_2\rho_1 \Rightarrow \rho_1=\frac{\phi_1}{1-\phi_2}
\]
由 \(\rho_{k}=\phi_{1} \rho_{k-1}+\phi_{2} \rho_{k-2}, \forall k>0\) , 与 \(\rho_1=\frac{\phi_1}{1-\phi_2}~, \rho_{0}=1\) ,可以计算任意阶延迟的ACF
平均周期长度
\(1-\phi_{1} B-\phi_{2} B^{2}=0\) 特征方程为 \(y^{2}-\phi_{1} y-\phi_{2}=0\)
若特征方程的根为共轭复特征根
记为 \(a\pm bi\)
则平均周期长度
\[k=\frac{2 \pi}{\cos ^{-1}[a / \sqrt{a^{2}+b^{2}}]}
\]
\(AR(p)\)
AR建模
步骤
- 确保对象为平稳序列
- 定阶
- 估计参数
- 残差诊断
- 优化
- 预测
定阶
PACF定阶
定义
\(PACF=Corr(X_t,X_{t-k}|X_{t-1},X_{t-2},\cdots,X_{t-k+1})\)
通过PACF图在 \(p\) 处截尾, 选取 \(p\)
信息准则定阶
- 赤池信息准则 (AIC)
- 贝叶斯信息准则 (BIC)
MA移动平均模型
\(MA(q)\)定义
满足 \(X_{t}=\mu+Z_{t}+\theta_{1} Z_{t-1}+\theta_{2} Z_{t-2}+\cdots+\theta_{q} Z_{t-q}\) 的平稳过程
性质
平稳性
不需要系数满足额外的限制条件,\(MA\) 模型总是因果平稳的
\(E\left(X_{t}\right)=\mu ; \quad \operatorname{Var}\left(X_{t}\right)=\sigma_{Z}^{2}\left(1+\theta_{1}^{2}+\cdots+\theta_{q}^{2}\right)\)
以及 \(\operatorname{Cov}\left(X_{t}, X_{t-k}\right)\) 均与 \(t\) 无关;
ACF
\[\operatorname{Cov}(X_{t}, X_{t-k})=\left\{\begin{array}{lr}
(1+\theta_{1}^{2}+\cdots+\theta_{q}^{2}) \sigma_{Z}^{2} & k=0 \\
(\sum_{i=0}^{q-k} \theta_{i} \theta_{i+k}) \sigma_{Z}^{2} & 1 \leq k \leq q \\
0 & k>q
\end{array}\right\}\]这里记 \(\theta_{0}=1\) 。
于是, \(M A(q)\) 过程的 \(ACF\) 为
\[\rho_{k}=\frac{\gamma_{k}}{\gamma_{0}}=\left\{\begin{array}{lc}
1 & k=0 \\
\frac{\sum_{i=0}^{q-k} \theta_{i} \theta_{i+k}}{1+\theta_{1}^{2}+\cdots+\theta_{q}^{2}} & 1 \leq k \leq q \\
0 & k>q
\end{array}\right.\]
可逆性
定义
如果 \(t\) 时刻的随机扰动可以表示为当前值和历史值的一个收敛和的形式,即
\(Z_{t}=\sum_{j=0}^{\infty} \pi_{j} X_{t-j}\)
其中, \(\pi_{0}=1, \sum\left|\pi_{j}\right|<\infty\) .
形式
\[\begin{array}{c}
X_{t}=\theta(B) Z_{t} \stackrel{可逆}{==} Z_{t}=X_{t}+\pi X_{t+1}=\pi(B) X_{t} \\
\theta(B) \pi(B)=1
\end{array}\]
MA建模
定阶
通过ACF图在 \(q\) 处截尾, 选取 \(q\)
时间序列分析2.X AR与MA的更多相关文章
- SPSS时间序列分析
时间序列分析必须建立在预处理的基础上…… 今天看了一条新闻体会到了网络日志的重要性…… 指数平滑法(Exponential Smoothing,ES)是布朗(Robert G..Brown)所提出,布 ...
- 时间序列分析算法【R详解】
简介 在商业应用中,时间是最重要的因素,能够提升成功率.然而绝大多数公司很难跟上时间的脚步.但是随着技术的发展,出现了很多有效的方法,能够让我们预测未来.不要担心,本文并不会讨论时间机器,讨论的都是很 ...
- python时间序列分析
题记:毕业一年多天天coding,好久没写paper了.在这动荡的日子里,也希望写点东西让自己静一静.恰好前段时间用python做了一点时间序列方面的东西,有一丁点心得体会想和大家 ...
- 《时间序列分析——基于R》王燕,读书笔记
笔记: 一.检验: 1.平稳性检验: 图检验方法: 时序图检验:该序列有明显的趋势性或周期性,则不是平稳序列 自相关图检验:(acf函数)平稳序列具有短期相关性,即随着延迟期数k的增加 ...
- 【转】时间序列分析——基于R,王燕
<时间序列分析——基于R>王燕,读书笔记 笔记: 一.检验: 1.平稳性检验: 图检验方法: 时序图检验:该序列有明显的趋势性或周期性,则不是平稳序列 自相关图检验:(ac ...
- R时间序列分析实例
一.作业要求 自选时间序列完成时间序列的建模过程,要求序列的长度>=100. 报告要求以下几部分内容: 数据的描述:数据来源.期间.数据的定义.数据长度. 作时间序列图并进行简单评价. 进行时间 ...
- ARIMA模型---时间序列分析---温度预测
(图片来自百度) 数据 分析数据第一步还是套路------画图 数据看上去比较平整,但是由于数据太对看不出具体情况,于是将只取前300个数据再此画图 这数据看上去很不错,感觉有隐藏周期的意思 代码 # ...
- pandas小记:pandas时间序列分析和处理Timeseries
http://blog.csdn.net/pipisorry/article/details/52209377 其它时间序列处理相关的包 [P4J 0.6: Periodic light curve ...
- 基于 Keras 的 LSTM 时间序列分析——以苹果股价预测为例
简介 时间序列简单的说就是各时间点上形成的数值序列,时间序列分析就是通过观察历史数据预测未来的值.预测未来股价走势是一个再好不过的例子了.在本文中,我们将看到如何在递归神经网络的帮助下执行时间序列分析 ...
- 时间序列分析工具箱——sweep
版权声明:本文为博主原创文章,未经博主同意不得转载. https://blog.csdn.net/kMD8d5R/article/details/81977856 作者:徐瑞龙.量化分析师,R语言中文 ...
随机推荐
- [python]《Python编程快速上手:让繁琐工作自动化》学习笔记1
1. 模式匹配与正则表达式笔记(第7章)(代码下载) 正则表达式,又称规则表达式.(英语:Regular Expression,在代码中常简写为regex.regexp或RE),计算机科学的一个概念. ...
- [Leetcode]环形链表 II
题目 代码 /** * Definition for singly-linked list. * struct ListNode { * int val; * ListNode *next; * Li ...
- [cocos2d-x]关于坐标系
本文从cocos2dx官网看到,搬运过来学习一下. cocos2d-x3.X的坐标系 Cocos2d-x坐标系和OpenGL坐标系相同,都是起源于笛卡尔坐标系. 笛卡尔坐标系中定义右手系原点在左下角, ...
- prettier+ts+eslint+vscode配置代码保存自动格式化,自动remove unsed declaration,delete no-unused-imports
每天都要开心(▽)哇: 以这个项目为案例 下面是项目的基本情况 What would you like to build? › App with Quasar CLI, let's go! Proje ...
- vue/cli子组件style中如何使用全局图片路径
- 设置多个系统---vue-el-admin
1. 修改\src\settings.js const ppp= { title: 'XXXX System', titleZH: 'XXXX系統', flag: 'ppp' } const syst ...
- 浅谈Python中的with,可能有你不知道的
Python中的with,没那么简单,虽然也不难 https://docs.python.org/zh-cn/3.9/reference/compound_stmts.html#the-with-st ...
- drf-视图集、路由系统、action装饰器
1.9个视图扩展类 1.两个视图基类:APIView.GenricAPIView 2.5个视图扩展类:CreateModelMixin,UpdateModelMixin,RetrieveModelMi ...
- 剑指Offer 05. 替换空格(java解题)
目录 1. 题目 2. 解题思路(通用 3. 数据类型功能函数总结 4. java代码 1. 题目 请实现一个函数,把字符串 s 中的每个空格替换成%20. 示例 1: 输入:s = "We ...
- kali linux生成密码字典方法
kali linux生成密码字典方法 所谓的密码字典主要是配合密码破解软件所使用,密码字典里包括许多人们习惯性设置的密码.这样可以提高密码破解软件的密码破解成功率和命中率,缩短密码破解的时间.当然,如 ...