Python从零到壹丨详解图像平滑的两种非线性滤波方法
摘要:本文将详细讲解两种非线性滤波方法中值滤波和双边滤波。
本文分享自华为云社区《[Python从零到壹] 五十六.图像增强及运算篇之图像平滑(中值滤波、双边滤波)》,作者: eastmount 。
一.中值滤波
前面讲述的都是线性平滑滤波,它们的中间像素值都是由邻域像素值线性加权得到的,接下来将讲解一种非线性平滑滤波——中值滤波。中值滤波通过计算每一个像素点某邻域范围内所有像素点灰度值的中值,来替换该像素点的灰度值,从而让周围的像素值更接近真实情况,消除孤立的噪声。
中值滤波对脉冲噪声有良好的滤除作用,特别是在滤除噪声的同时,能够保护图像的边缘和细节,使之不被模糊处理,这些优良特性是线性滤波方法所不具有的,从而使其常常被应用于消除图像中的椒盐噪声[1-2]。
中值滤波算法的计算过程如图1所示。选择含有五个点的窗口,依次扫描该窗口中的像素,每个像素点所对应的灰度值按照升序或降序排列,然后获取最中间的值来替换该点的灰度值。
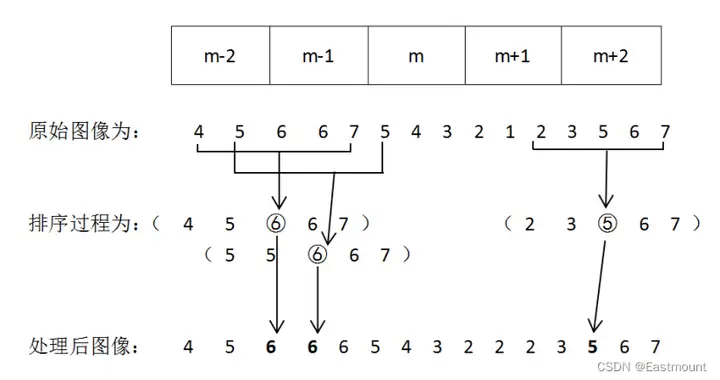
上图展示的是矩形窗口,常用的窗口还包括正方形、十字形、环形和圆形等,不同形状的窗口会带来不同的过滤效果,其中正方形和圆形窗口适合于外轮廓边缘较长的图像,十字形窗口适合于带尖角形状的图像。
OpenCV将中值滤波封装在medianBlur()函数中,其函数原型如下所示:
- dst = medianBlur(src, ksize[, dst])
– src表示待处理的输入图像
– dst表示输出图像,其大小和类型与输入图像相同
– ksize表示内核大小,其值必须是大于1的奇数,如3、5、7等
下面是调用medianBlur()函数实现中值滤波的代码。
# -*- coding: utf-8 -*-
# By:Eastmount
import cv2
import numpy as np
import matplotlib.pyplot as plt
#读取图片
img = cv2.imread('lena-zs.png')
source = cv2.cvtColor(img,cv2.COLOR_BGR2RGB)
#中值滤波
result = cv2.medianBlur(source, 3)
#用来正常显示中文标签
plt.rcParams['font.sans-serif']=['SimHei']
#显示图形
titles = ['原始图像', '中值滤波']
images = [source, result]
for i in range(2):
plt.subplot(1,2,i+1), plt.imshow(images[i], 'gray')
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
其运行结果如图2所示,它有效地过滤掉了“lena”图中的噪声,并且很好地保护了图像的边缘信息,使之不被模糊处理。

二.双边滤波
双边滤波(Bilateral filter)是由Tomasi和Manduchi在1998年发明的一种各向异性滤波,它一种非线性的图像平滑方法,结合了图像的空间邻近度和像素值相似度(即空间域和值域)的一种折中处理,从而达到保边去噪的目的。双边滤波的优势是能够做到边缘的保护,其他的均值滤波、方框滤波和高斯滤波在去除噪声的同时,都会有较明显的边缘模糊,对于图像高频细节的保护效果并不好[3]。
双边滤波比高斯滤波多了一个高斯方差sigma-d,它是基于空间分布的高斯滤波函数。所以在图像边缘附近,离的较远的像素点不会过于影响到图像边缘上的像素点,从而保证了图像边缘附近的像素值得以保存。但是双边滤波也存在一定的缺陷,由于它保存了过多的高频信息,双边滤波不能有效地过滤掉彩色图像中的高频噪声,只能够对低频信息进行较好地去噪[4]。
在双边滤波器中,输出的像素值依赖于邻域像素值的加权值组合,对输入图像进行局部加权平均得到输出图像 的像素值,其公式如下所示:
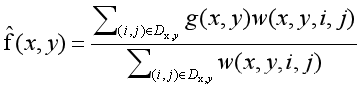
式中表示中心点(x,y)的(2N+1)×(2N+1)的领域像素,值依赖于领域像素值的加权平均。权重系数取决于空间域核(domain)和值域核(range)的乘积。空间域核的定义如公式(2)所示。
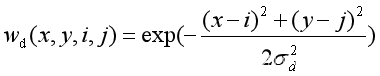
值域核的定义如公式(3)所示。
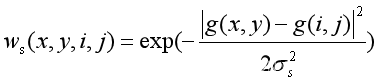
两者相乘之后,就会产生依赖于数据的双边滤波权重函数,如下所示:

从式子(4)可以看出,双边滤波器的加权系数是空间邻近度因子和像素亮度相似因子的非线性组合。前者随着像素点与中心点之间欧几里德距离的增加而减小,后者随着像素亮度之差的增大而减小[5-6]。
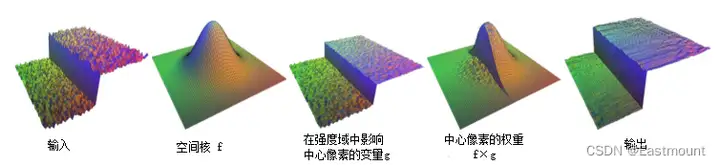
在图像变化平缓的区域,邻域内亮度值相差不大,双边滤波器转化为高斯低通滤波器;在图像变化剧烈的区域,邻域内像素亮度值相差较大,滤波器利用边缘点附近亮度值相近的像素点的亮度平均值替代原亮度值。因此,双边滤波器既平滑了图像,又保持了图像边缘,其原理图如图3所示。
OpenCV将中值滤波封装在bilateralFilter()函数中,其函数原型如下所示:
- dst = bilateralFilter(src, d, sigmaColor, sigmaSpace[, dst[, borderType]])
– src表示待处理的输入图像
– dst表示输出图像,其大小和类型与输入图像相同
– d表示在过滤期间使用的每个像素邻域的直径。如果这个值我们设其为非正数,则它会由sigmaSpace计算得出
– sigmaColor表示颜色空间的标准方差。该值越大,表明像素邻域内较远的颜色会混合在一起,从而产生更大面积的半相等颜色区域
– sigmaSpace表示坐标空间的标准方差。该值越大,表明像素的颜色足够接近,从而使得越远的像素会相互影响,更大的区域中相似的颜色获取相同的颜色,当d>0,d指定了邻域大小且与sigmaSpace无关。否则,d正比于sigmaSpace
– borderType表示边框模式,用于推断图像外部像素的某种边界模式,默认值为BORDER_DEFAULT,可省略
下面是调用bilateralFilter()函数实现双边滤波的代码,其中d为15,sigmaColor设置为150,sigmaSpace设置为150。
# -*- coding: utf-8 -*-
# By:Eastmount
import cv2
import numpy as np
import matplotlib.pyplot as plt
#读取图片
img = cv2.imread('lena-zs.png')
source = cv2.cvtColor(img,cv2.COLOR_BGR2RGB)
#双边滤波
result = cv2.bilateralFilter(source, 15, 150, 150)
#用来正常显示中文标签
plt.rcParams['font.sans-serif']=['SimHei']
#显示图形
titles = ['原始图像', '双边滤波']
images = [source, result]
for i in range(2):
plt.subplot(1,2,i+1), plt.imshow(images[i], 'gray')
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
其运行结果如图4所示:

三.总结
本文主要讲解了常用于消除噪声的图像平滑方法,常见方法包括三种线性滤波(均值滤波、方框滤波、高斯滤波)和两种非线性滤波(中值滤波、双边滤波)。这篇文章介绍了中值滤波和双边滤波,通过原理和代码进行对比,分别讲述了各种滤波方法的优缺点,有效地消除了图像的噪声,并保留图像的边缘轮廓。
Python从零到壹丨详解图像平滑的两种非线性滤波方法的更多相关文章
- Python从零到壹丨图像增强及运算:图像掩膜直方图和HS直方图
摘要:本章主要讲解图像直方图相关知识点,包括掩膜直方图和HS直方图,并通过直方图判断黑夜与白天,通过案例分享直方图的实际应用. 本文分享自华为云社区<[Python从零到壹] 五十二.图像增强及 ...
- parted分区详解 查看UUID两种方式 blkid 和 ls -l /dev/disk/by-uuid
通常我们用的比较多的一般都是fdisk工具来进行分区,但是现在由于磁盘越来越廉价,而且磁盘空间越来越大:而fdisk工具他对分区是有大小限制的,它只能划分小于2T的磁盘.但是现在的磁盘空间很多都已经是 ...
- Solr系列二:solr-部署详解(solr两种部署模式介绍、独立服务器模式详解、SolrCloud分布式集群模式详解)
一.solr两种部署模式介绍 Standalone Server 独立服务器模式:适用于数据规模不大的场景 SolrCloud 分布式集群模式:适用于数据规模大,高可靠.高可用.高并发的场景 二.独 ...
- 详解Redis中两种持久化机制RDB和AOF(面试常问,工作常用)
redis是一个内存数据库,数据保存在内存中,但是我们都知道内存的数据变化是很快的,也容易发生丢失.幸好Redis还为我们提供了持久化的机制,分别是RDB(Redis DataBase)和AOF(Ap ...
- 详解Redis中两种持久化机制RDB和AOF
redis是一个内存数据库,数据保存在内存中,但是我们都知道内存的数据变化是很快的,也容易发生丢失.幸好Redis还为我们提供了持久化的机制,分别是RDB(Redis DataBase)和AOF(Ap ...
- 从0到1学Python丨图像平滑方法的两种非线性滤波:中值滤波、双边滤波
摘要:常用于消除噪声的图像平滑方法包括三种线性滤波(均值滤波.方框滤波.高斯滤波)和两种非线性滤波(中值滤波.双边滤波),本文将详细讲解两种非线性滤波方法. 本文分享自华为云社区<[Python ...
- python数据分析数据标准化及离散化详解
python数据分析数据标准化及离散化详解 本文为大家分享了python数据分析数据标准化及离散化的具体内容,供大家参考,具体内容如下 标准化 1.离差标准化 是对原始数据的线性变换,使结果映射到[0 ...
- Python学习一:序列基础详解
作者:NiceCui 本文谢绝转载,如需转载需征得作者本人同意,谢谢. 本文链接:http://www.cnblogs.com/NiceCui/p/7858473.html 邮箱:moyi@moyib ...
- Python学习二:词典基础详解
作者:NiceCui 本文谢绝转载,如需转载需征得作者本人同意,谢谢. 本文链接:http://www.cnblogs.com/NiceCui/p/7862377.html 邮箱:moyi@moyib ...
- python 3.x 爬虫基础---Urllib详解
python 3.x 爬虫基础 python 3.x 爬虫基础---http headers详解 python 3.x 爬虫基础---Urllib详解 前言 爬虫也了解了一段时间了希望在半个月的时间内 ...
随机推荐
- Java流程控制之用户交互Scanner
Scanner对象 java.util.Scanner是Java5的新特征,可以通过Scanner类来获取用户的输入 #基本语法# Scanner s = new Scanner(System.in) ...
- lua中self的意义
原文链接 最近在用合宙的Air302开发物联网项目,因为合宙用的自家的luatOS操作系统,二次开发全都要用lua写,据说lua写起代码比C更方便,但是不会就是不会啊喂!!学不会就是不方便啊,例如这个 ...
- MySQL(1): 基本操作
MySQL 是流行的关系型数据库管理系统之一,特别是在WEB应用方面.推荐用5.6版本. My Sql客户端有很多 还有PHP MyAdmin, 是以web形式控制和操作MySQL数据库的管理工具.是 ...
- [419] C1 Harbingers Of War OpCodez
[419] C1 Harbingers Of War Client 00 SendProtocolVersion 01 MoveBackwardToLocation 02 Say 03 Request ...
- Java-【Arrays类】和【System类】
Arrays类 [基本介绍] JDK中提供了一个专门用于操作数组的工具类,即Arrays类,位于java util 中. 用前需导包:import java.util.Arrays; [常用方法] 返 ...
- GitLab版本定版
定版指令: git add -Agit commit -m ""git push origin develops:V5.2
- Console对象的实例方法
1.console.table 将数据以表格的形式显示. 这个方法需要一个必须参数 data,data 必须是一个数组或者是一个对象:还可以使用一个可选参数 columns. // Output an ...
- 【APT】Patchwork APT组织针对巴基斯坦国防官员攻击活动分析
前言 Patchwork(白象.摩诃草.APT-C-09.Dropping Elephant)是一个疑似具有印度国家背景的APT组织,该组织长期针对中国.巴基斯坦等南亚地区国家进行网络攻击窃密活动.本 ...
- C#中的范围类型(Range Type)
//语法糖Rangestatic void Main(string[] args) { var myArray = new string[] { "Item1", "It ...
- Java实现简单的大顶堆
Java实现简单的大顶堆 今天刷LeetCode的347. 前 K 个高频元素的时候使用到了优先队列,由于对大顶堆掌握不算熟练,于是写了一个简单大顶堆练手: 实现代码在最后 之前很少使用泛型来写代码, ...