ROS系统-第一讲


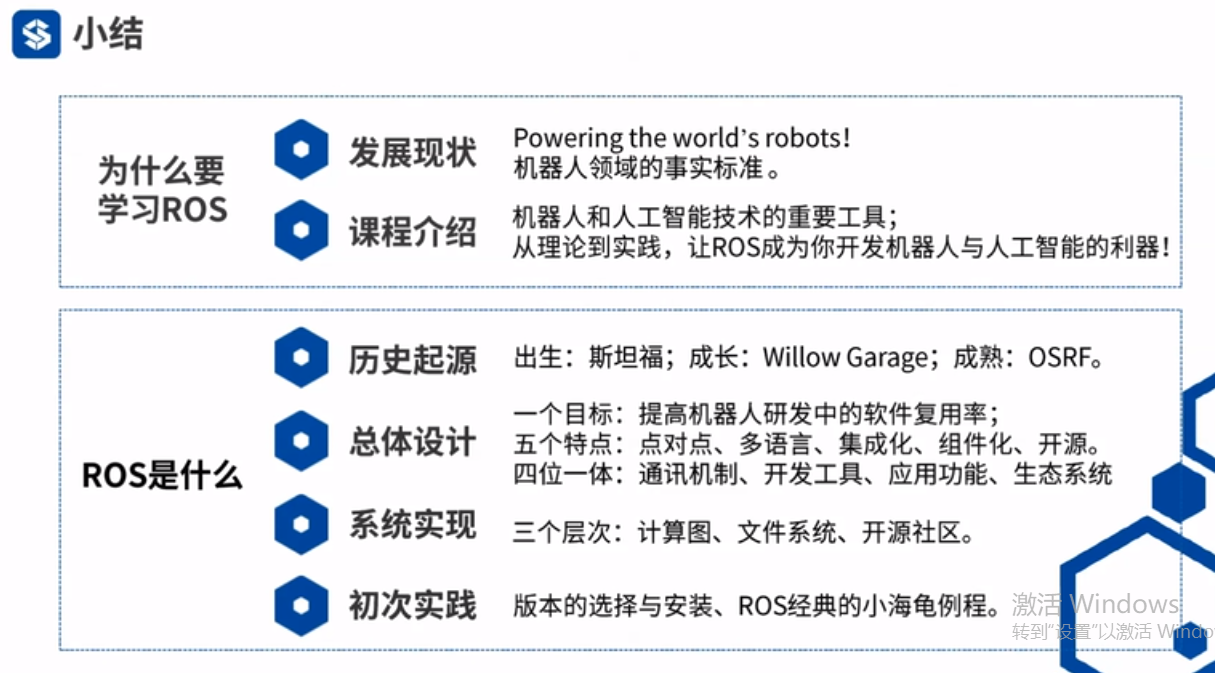
ROS是什么
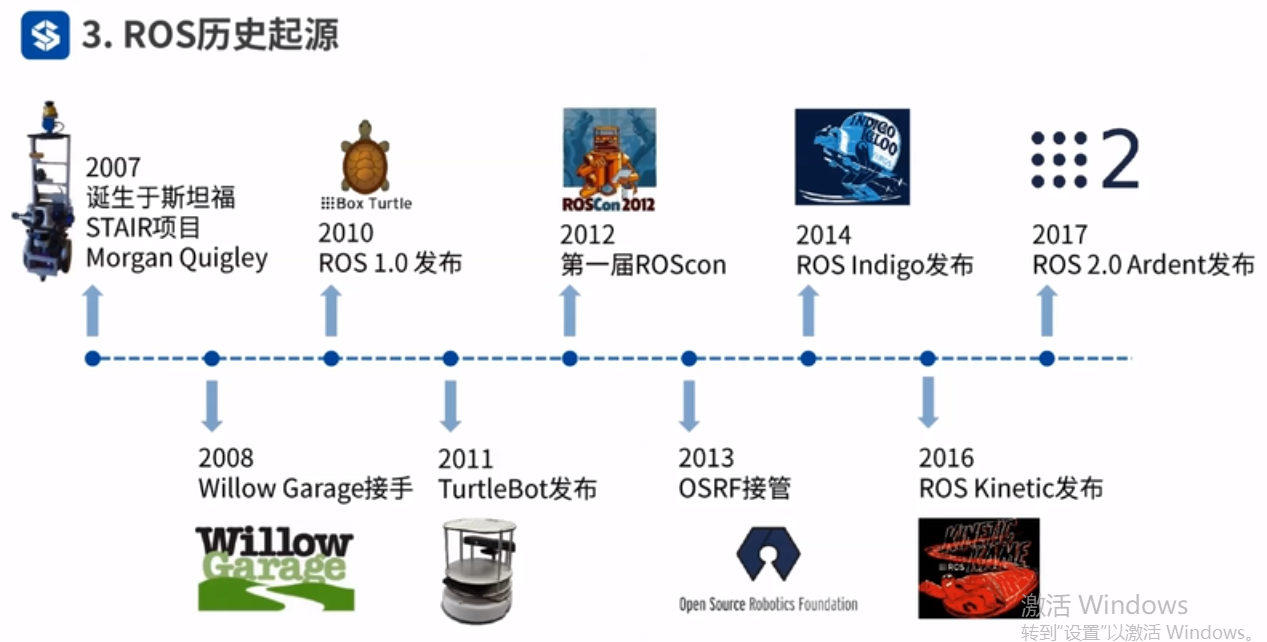
ROS历史起源
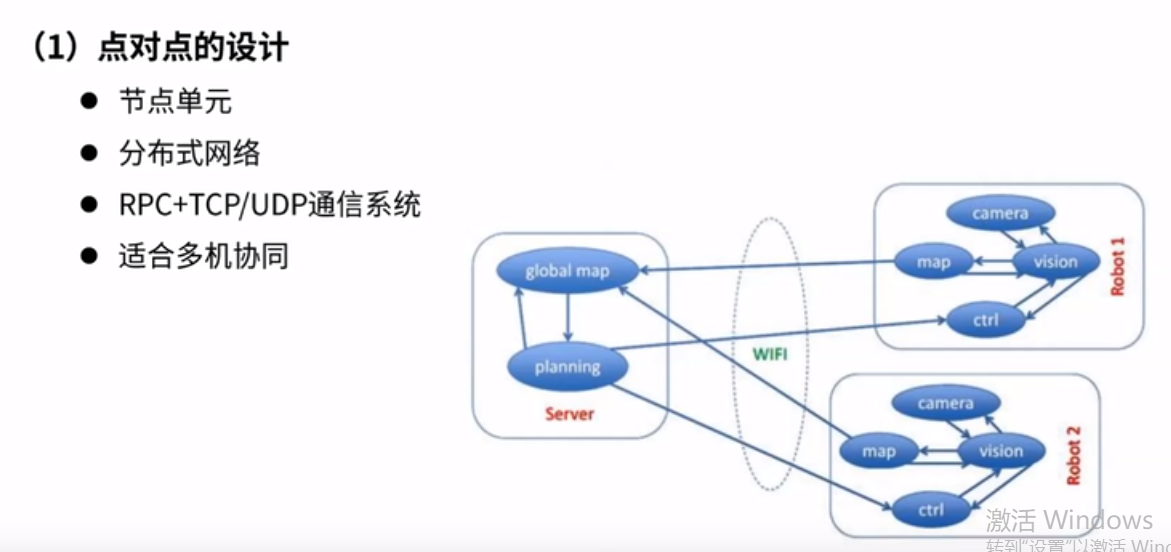
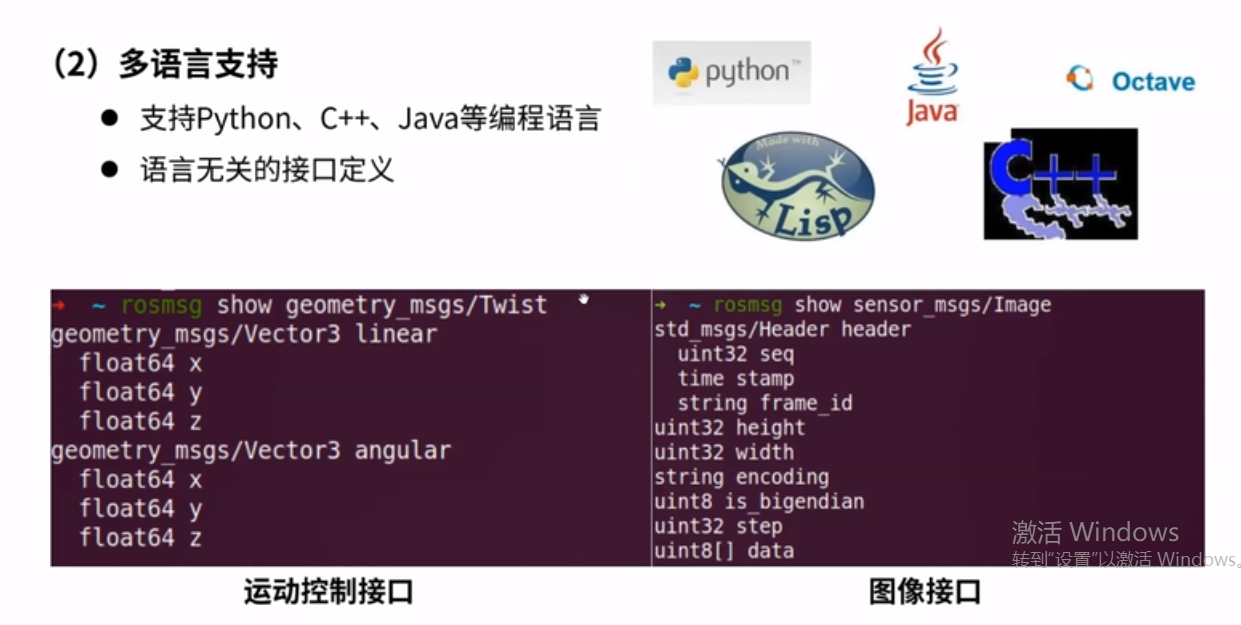
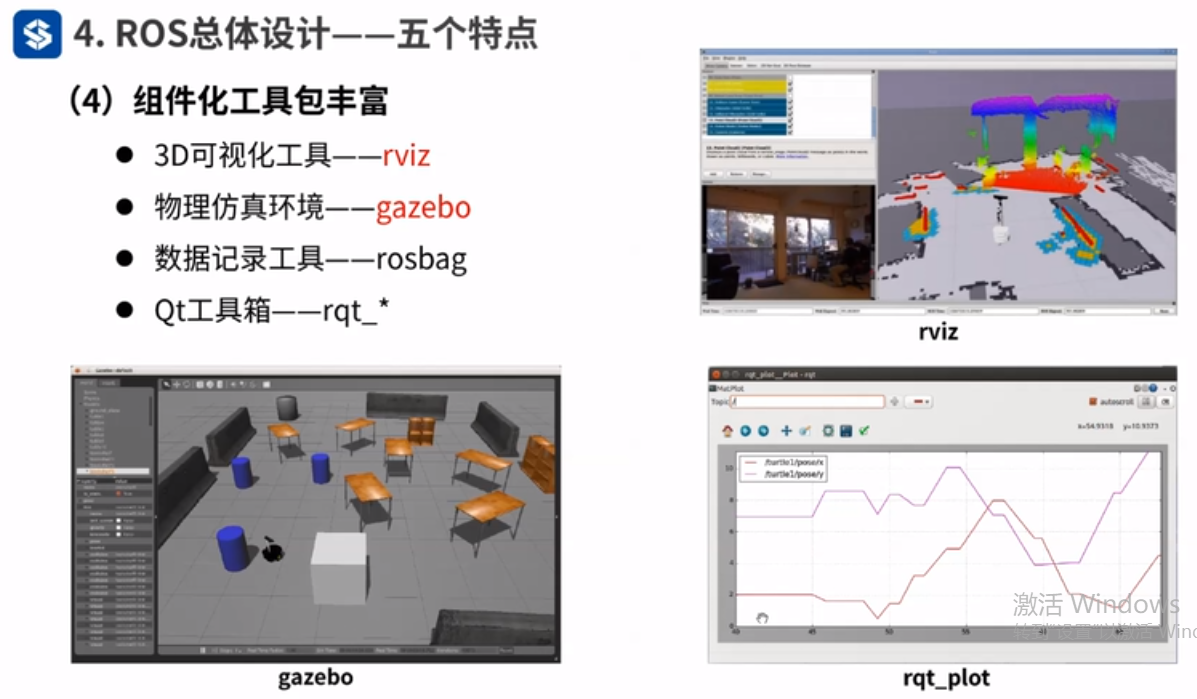
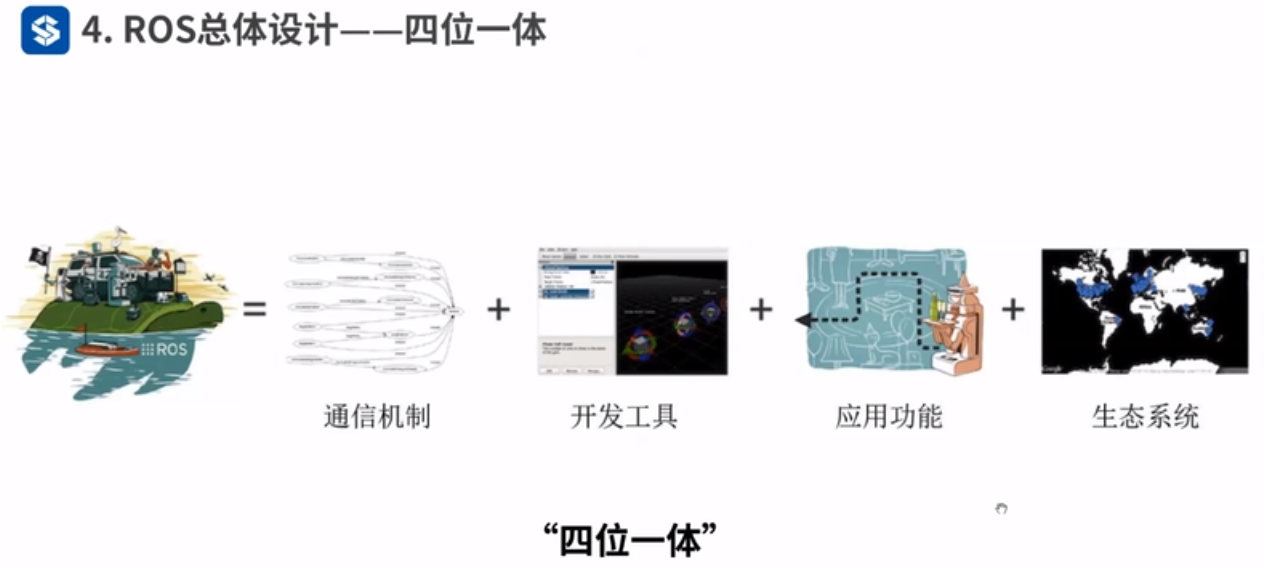
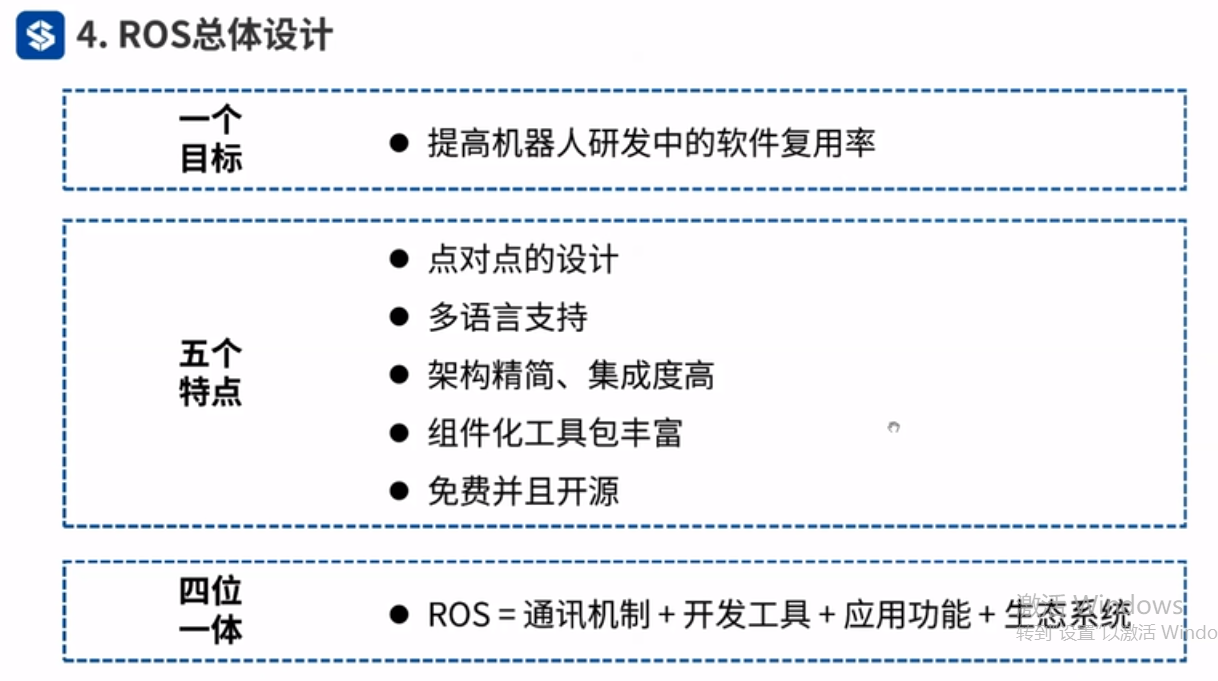
ROS总体设计


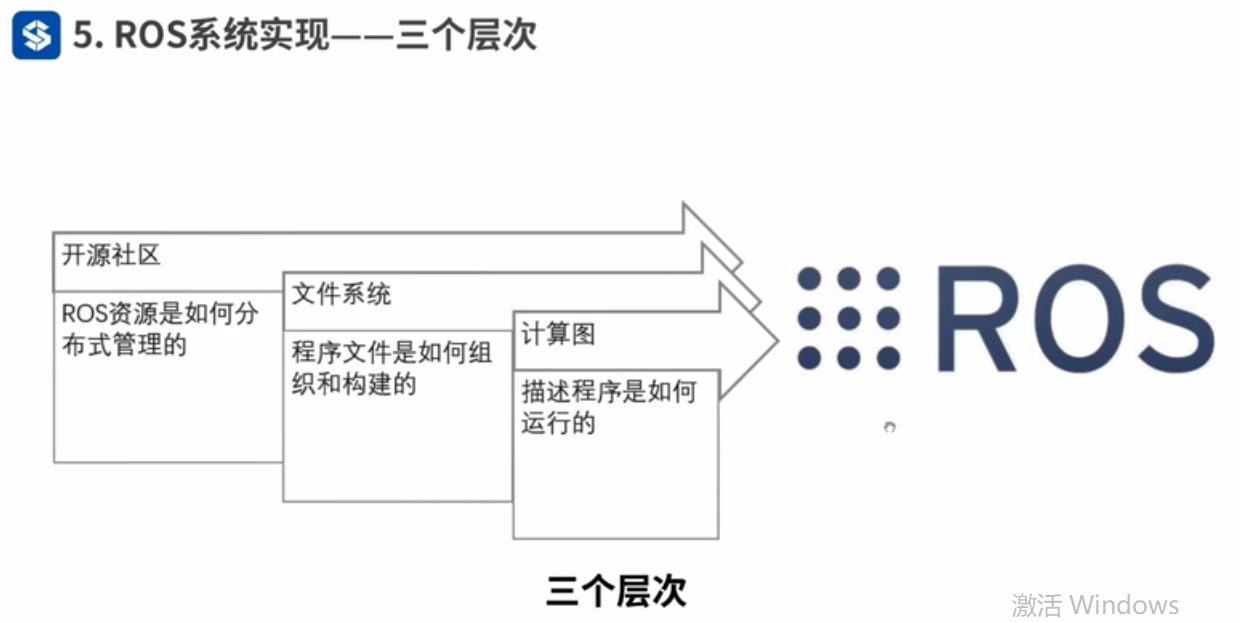
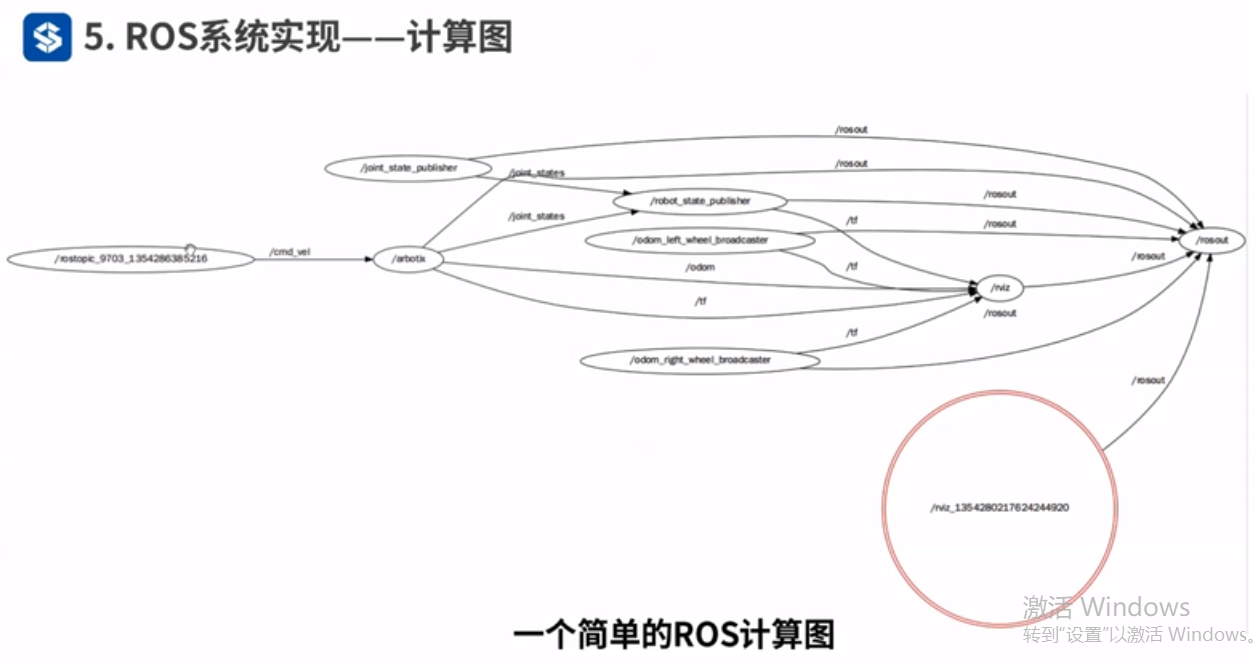
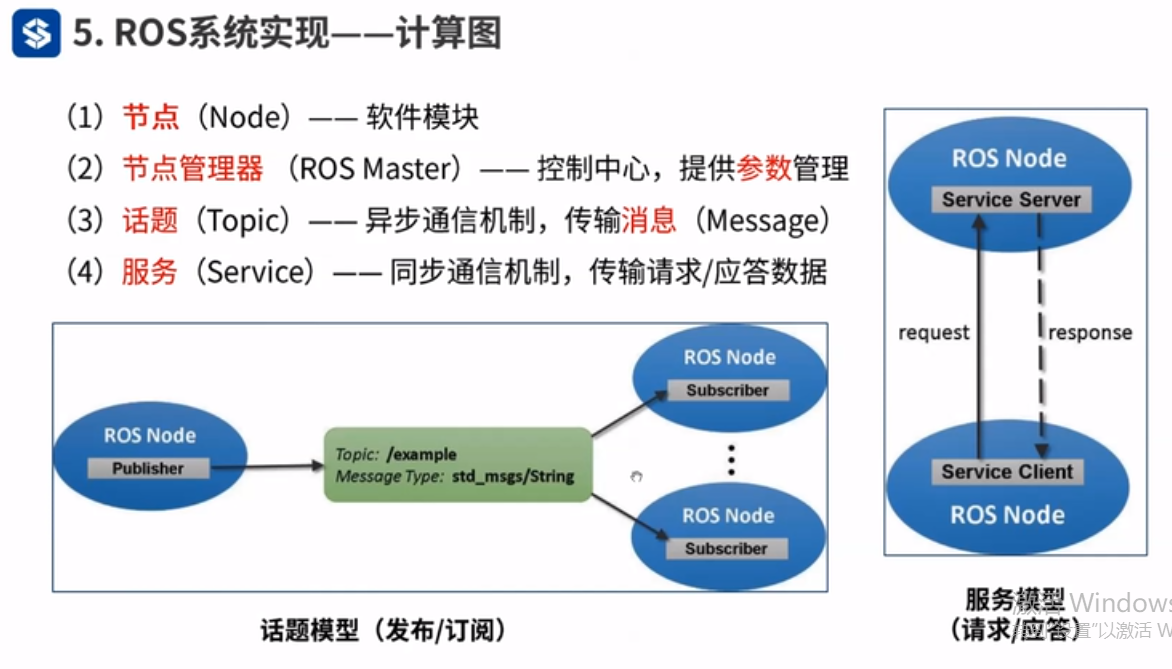
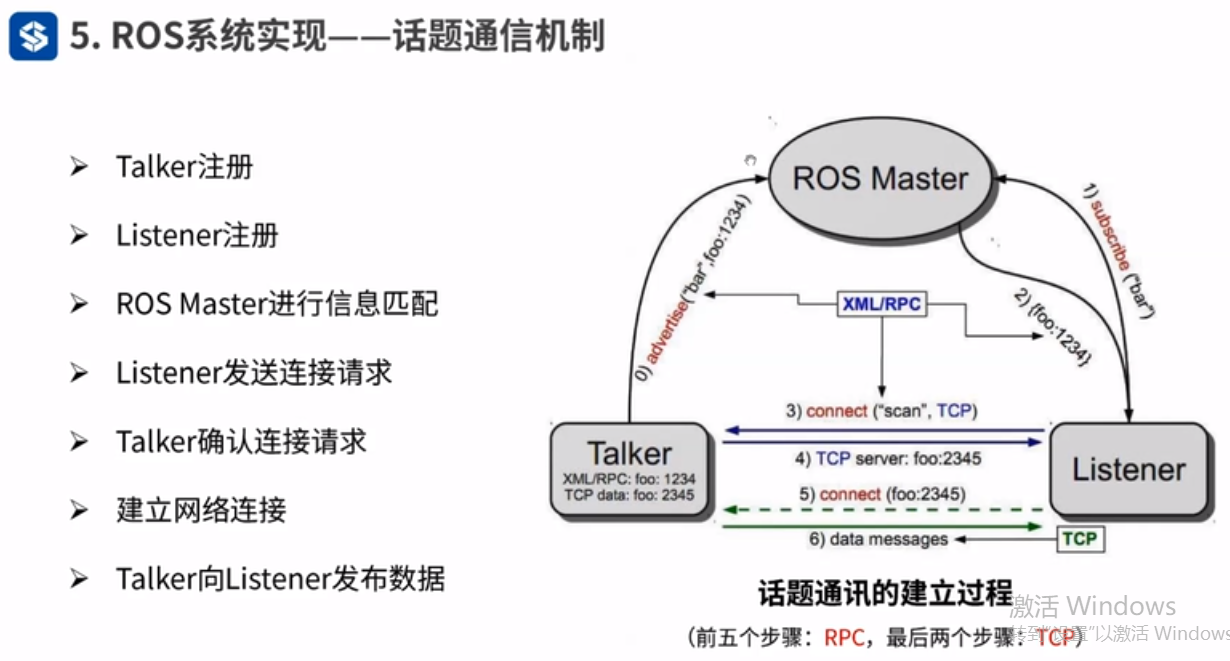
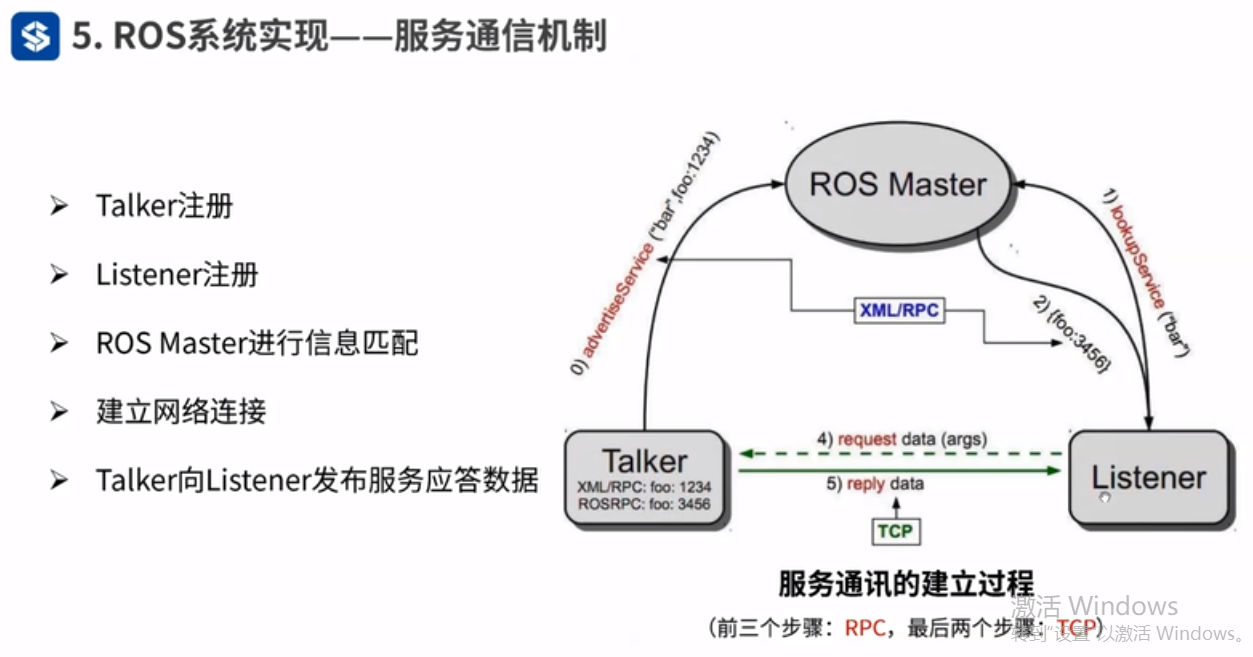
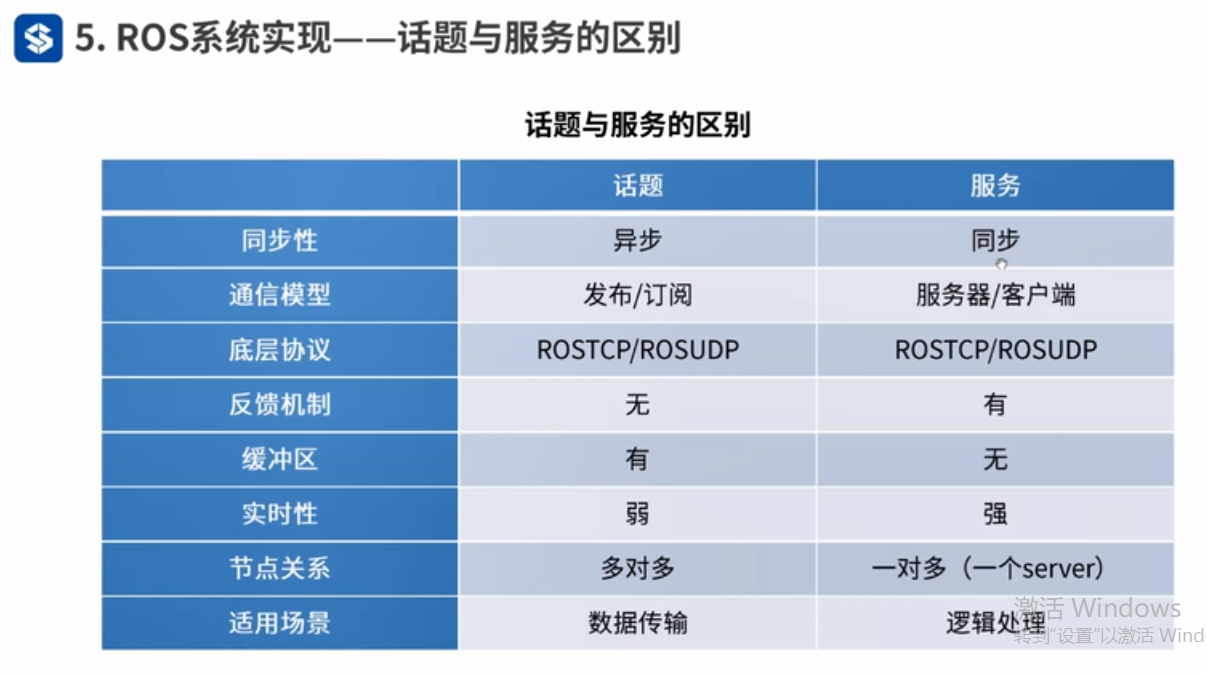
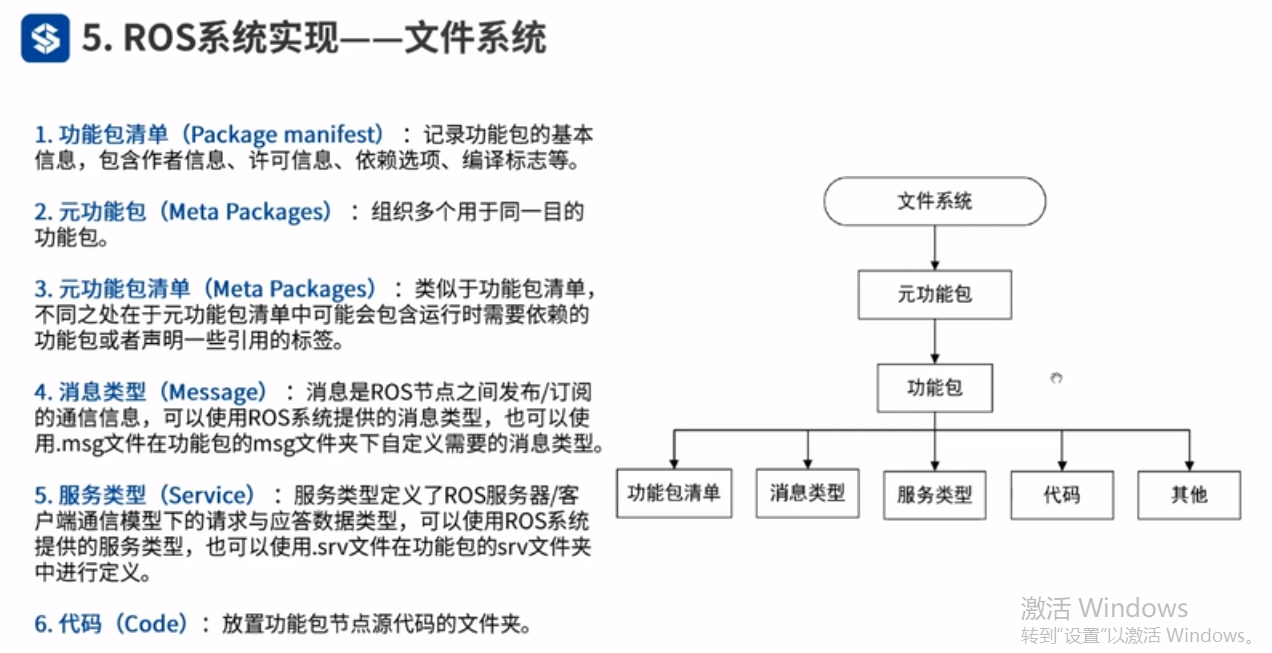
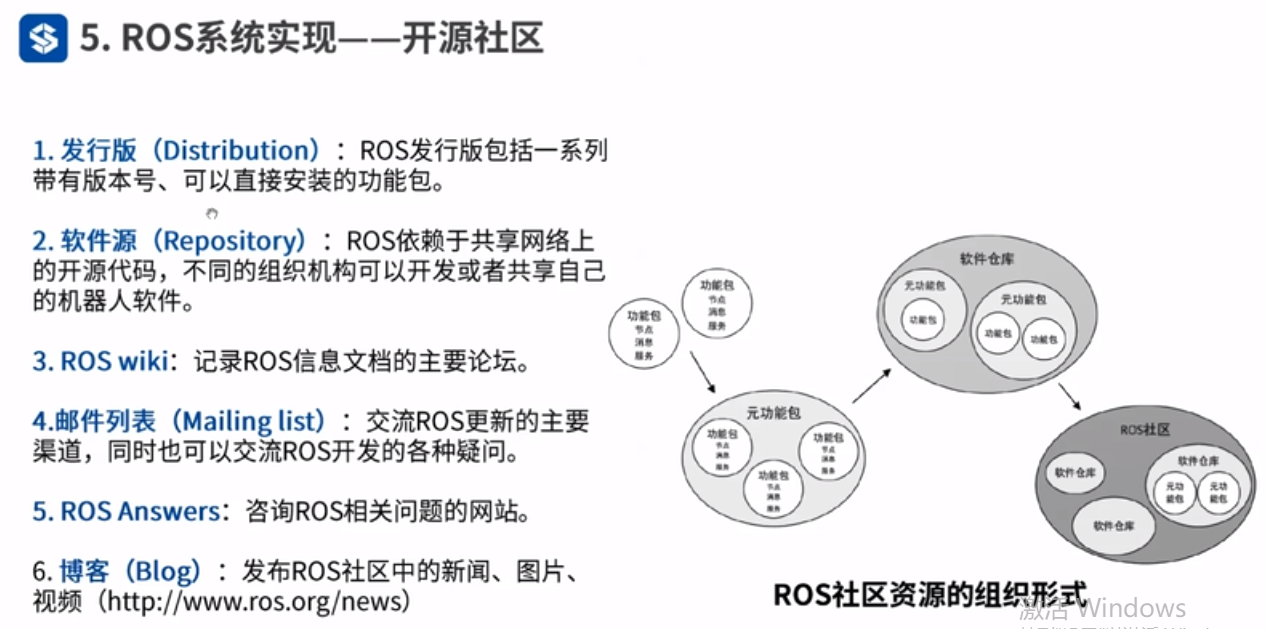
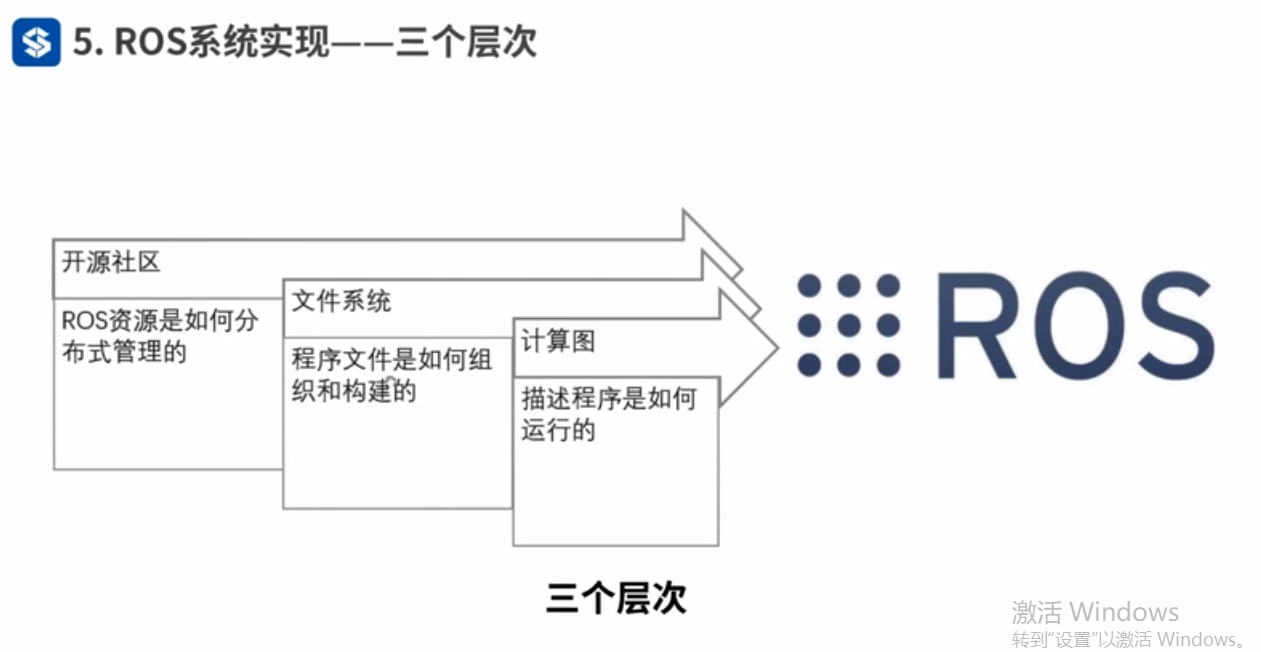
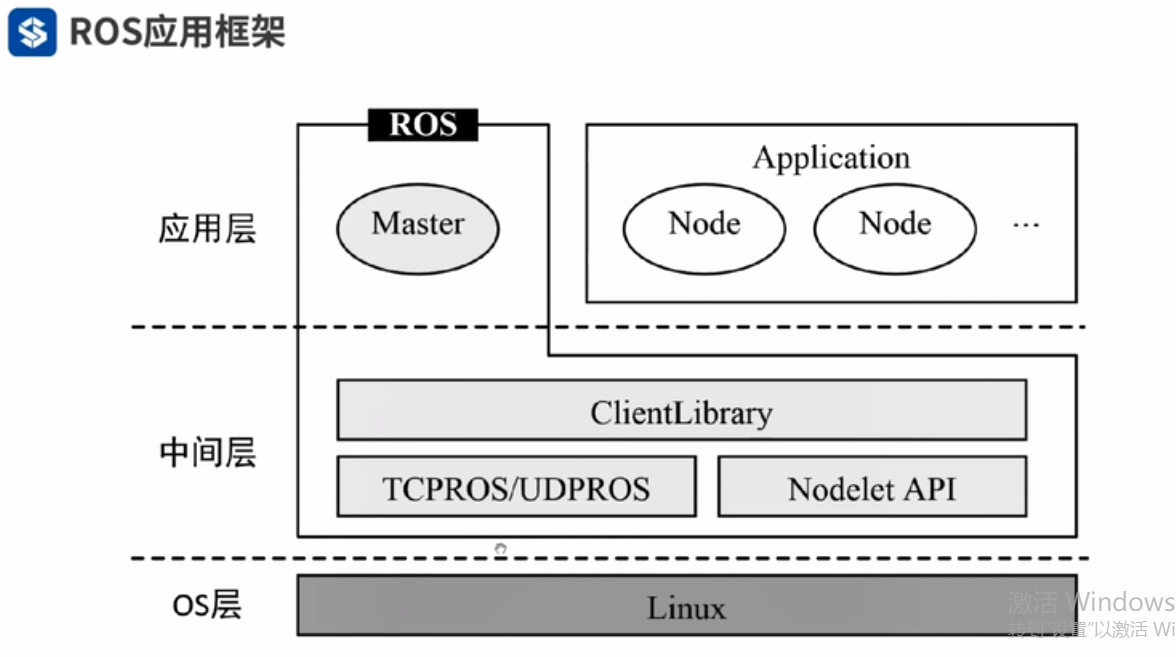
系统实现

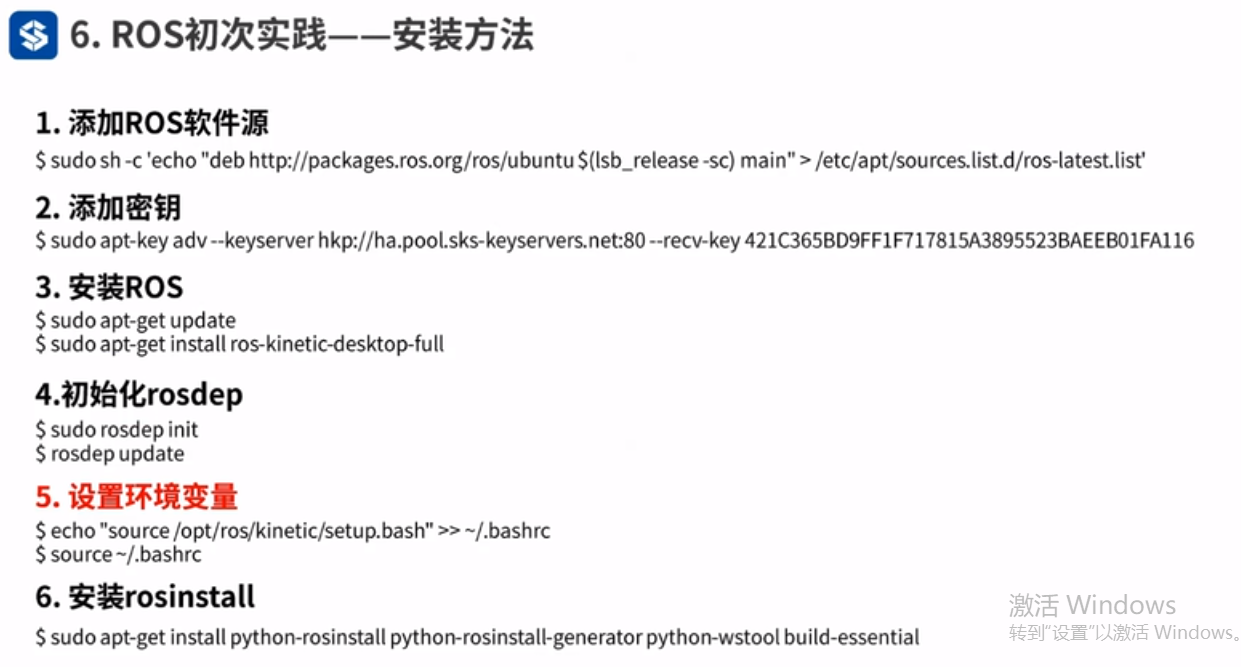
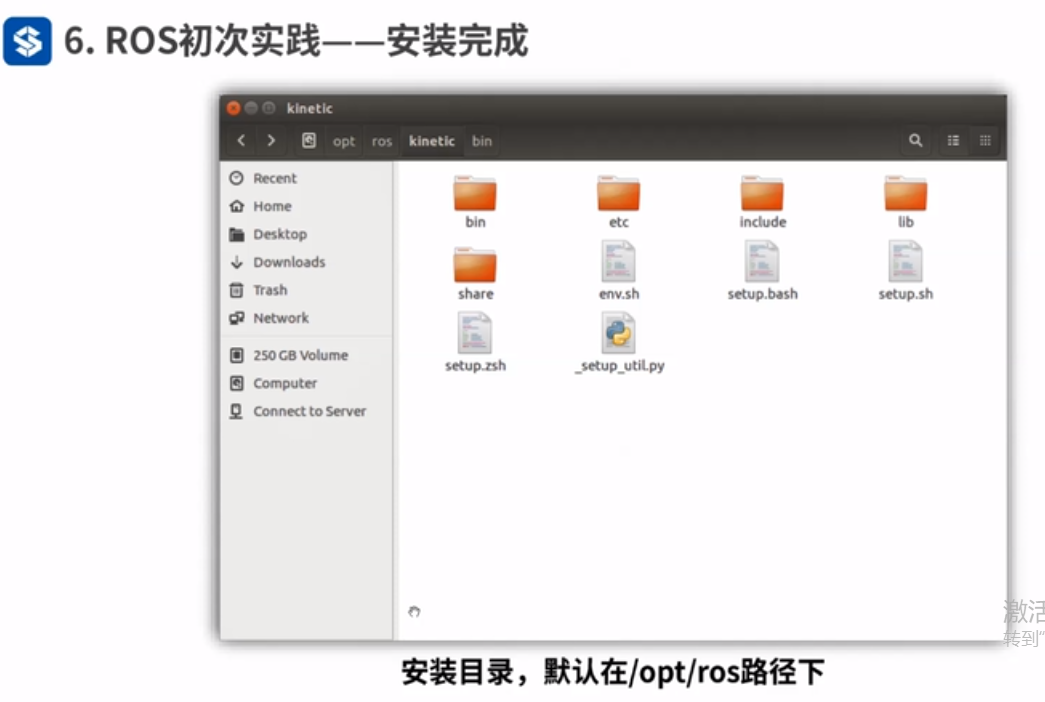
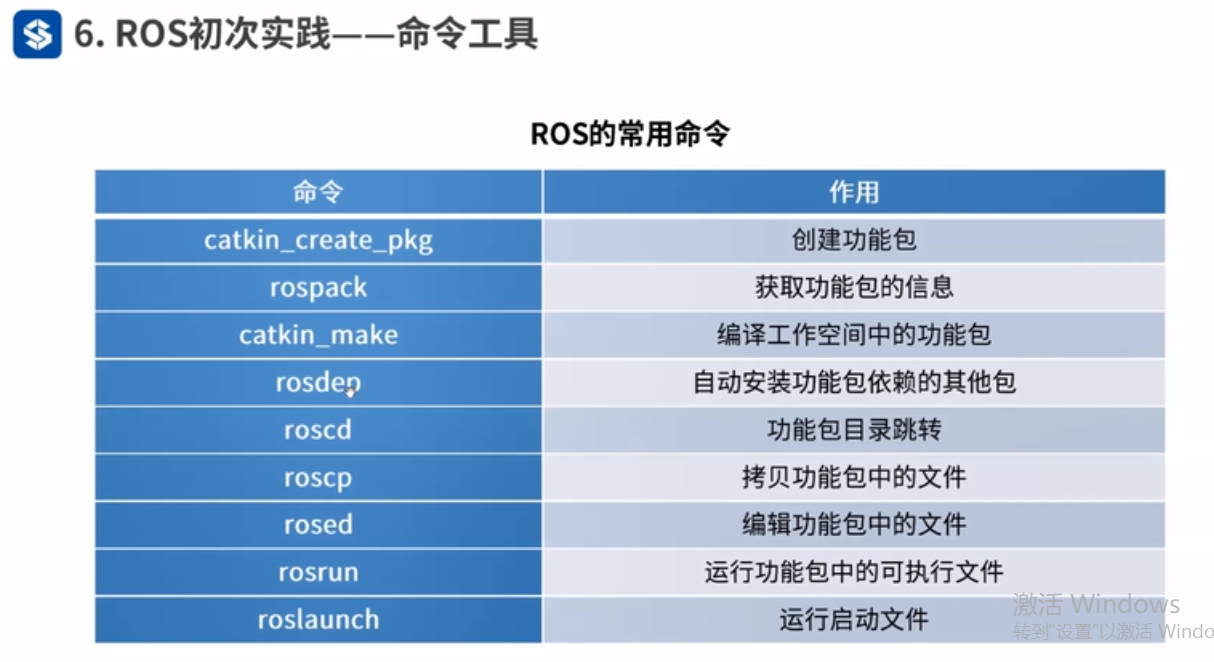
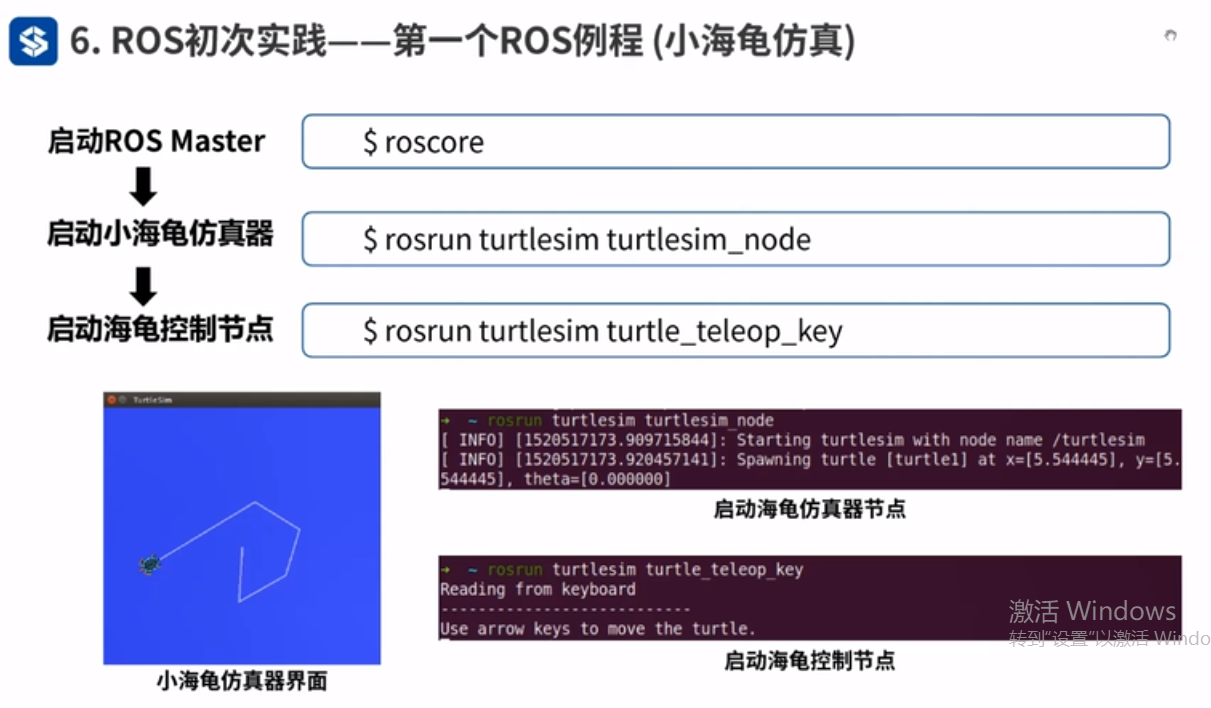
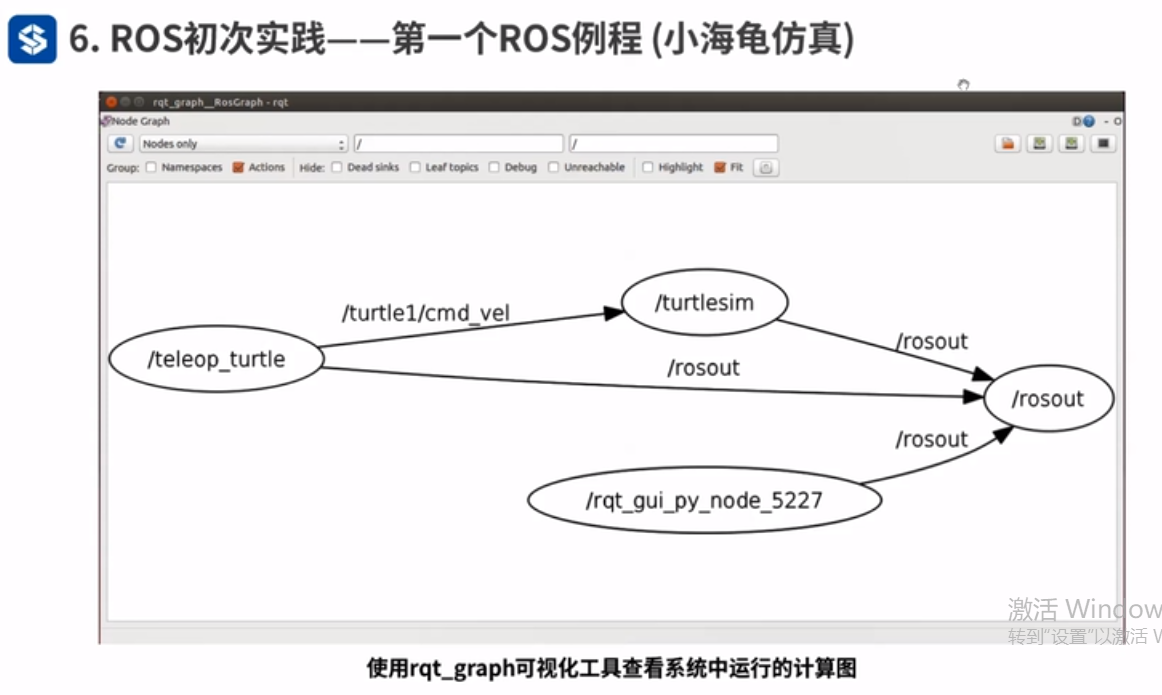
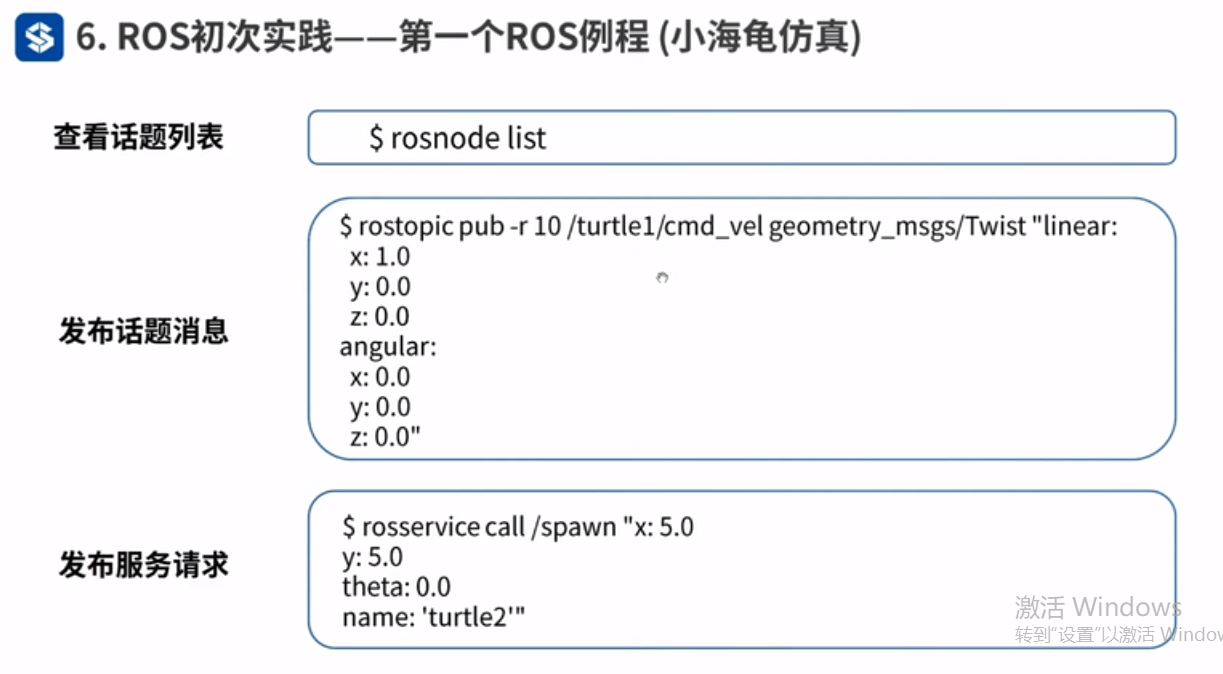
初次实践


ROS系统-第一讲的更多相关文章
- ros系统21讲—前六讲
课程介绍(第一讲) linux介绍安装(第二讲) linux的基础操作(第三讲) ROS中语言c++与python介绍(第四讲) 安装ROS系统(第五讲) 第一个: sudo sh -c echo d ...
- S2SH商用后台权限系统第一讲
各位博友: 您好!从今天开始我们做一套商用的权限系统.功能包含用户管理.角色管理.模块管理.权限管理.大家知道每个商用系统肯定会拥有一套后台系统,我们所讲的权限系统是整个系统核心部分.本套系统技术有s ...
- ROS机器人程序设计(原书第2版)补充资料 (壹) 第一章 ROS系统入门
ROS机器人程序设计(原书第2版)补充资料 (壹) 第一章 ROS系统入门 书中,大部分出现hydro的地方,直接替换为indigo或jade或kinetic,即可在对应版本中使用. 第一章主要包括R ...
- 32位汇编第一讲x86和8086的区别,以及OllyDbg调试器的使用
32位汇编第一讲x86和8086的区别,以及OllyDbg调试器的使用 一丶32位(x86也称为80386)与8086(16位)汇编的区别 1.寄存器的改变 AX 变为 EAX 可以这样想,16位通 ...
- 异常处理第一讲(SEH),筛选器异常,以及__asm的扩展,寄存器注入简介
异常处理第一讲(SSH),筛选器异常,以及__asm的扩展 博客园IBinary原创 博客连接:http://www.cnblogs.com/iBinary/ 转载请注明出处,谢谢 一丶__Asm的 ...
- PE文件格式详解,第一讲,DOS头文件格式
PE文件格式详解,第一讲,DOS头文件格式 今天讲解PE文件格式的DOS头文件格式 首先我们要理解,什么是文件格式,我们常说的EXE可执行程序,就是一个文件格式,那么我们要了解它里面到底存了什么内容 ...
- 脱壳第一讲,手工脱壳ASPack2.12的壳.ESP定律
脱壳第一讲,手工脱壳ASPack2.12的壳.ESP定律 一丶什么是ESP定律 首先我们要明白什么是壳.壳的作用就是加密PE的. 而ESP定律就是壳在加密之前,肯定会保存所有寄存器环境,而出来的时候, ...
- ROS系统MoveIt玩转双臂机器人系列(一)
一.ROS系统的MoveIt模块简介 机器人操作系统ROS目前最受关注的两个模块是导航(Navigation)和机械臂控制(MoveIt!),其中,机械臂控制模块(后面简称MoveIt)可以让用户快速 ...
- ROS机器人程序设计(原书第2版)补充资料 (贰) 第二章 ROS系统架构及概念
ROS机器人程序设计(原书第2版)补充资料 (贰) 第二章 ROS系统架构及概念 书中,大部分出现hydro的地方,直接替换为indigo或jade或kinetic,即可在对应版本中使用. 由于工作事 ...
随机推荐
- GAN实战笔记——第六章渐进式增长生成对抗网络(PGGAN)
渐进式增长生成对抗网络(PGGAN) 使用 TensorFlow和 TensorFlow Hub( TFHUB)构建渐进式增长生成对抗网络( Progressive GAN, PGGAN或 PROGA ...
- selenium+python自动化101-使用execute_script() 方法获取 JavaScript 返回值
前言 之前经常使用 execute_script() 方法执行 JavaScript 的来解决页面上一些 selenium 无法操作的元素,但是一直无法获取执行的返回值. 最近翻文档,发现 execu ...
- 什么是NFT?
我有一个年轻朋友,最近买了一个数字艺术品,9百多入手,几周后卖掉,赚了7万多,他告诉我这个东西叫NFT. 2021年twitter创始人杰克.多西将自己发布的第一条twitter通过NFT以250万美 ...
- C#中?和:?和??代表什么
?代表可空类型修饰符 引用类型可以使用空引用表示一个不存在的值,而值类型通常不能表示为空.为了使值类型也可为空,就可以使用可空类型?:带便三元表达式 int a=b>c?b:c 如果 ...
- python面试_总结03_列表练习题
1.列表练习题 完成下列列表相关的编程题,先运行下列的test函数,在完成每道题之后,都可以通过调用test函数检测所写函数对错. def test(got, expected): if got == ...
- 矩池云上安装ikatago及远程链接教程
https://github.com/kinfkong/ikatago-resources/tree/master/dockerfiles 从作者的库中可以看到,该程序支持cuda9.2.cuda10 ...
- 解决 MySQL 的 Table is marked as crashed and should be repaired 问题
解决方法: 找到mysql的安装目录的bin/myisamchk工具,在命令行中输入: myisamchk -c -r ../data/mysql/user.MYI 然后myisamchk 工具会帮助 ...
- CSAPP-Lab05 Cache Lab 深入解析
本文首发于我的知乎专栏:https://zhuanlan.zhihu.com/p/484657229 实验概览 Cache Lab 分为两部分,编写一个高速缓存模拟器以及要求优化矩阵转置的核心函数,以 ...
- java案例—遍历字符串
/*案例:遍历并打印字符串 需求:键盘录入一个字符串,使用程序在控制台遍历该字符串 分析:1.使用Scanner类获取输入的字符串 2.使用public char charAt(int index)方 ...
- 给windows右键添加快捷启动程序
给windows右键添加快捷启动程序 修改点击空白处的右键 运行--redegit 打开注册表 展开第一个H..C..R 找到 Direcory,展开 找到Background 展开 右键shell, ...