Pro Android学习笔记(一五四):传感器(4):陀螺仪、加速传感器
文章转载只能用于非商业性质,且不能带有虚拟货币、积分、注册等附加条件。转载须注明出处http://blog.csdn.net/flowingflying/以及作者@恺风Wei。
陀螺仪
陀螺仪(Gyroscope sensor)测量设备转动的角速度。最早的陀螺仪发明在中国,科学应用则在西方,陀螺仪是为士大夫坐轿子看书是免收烛光摇曳发明的,这在很久之前一部西方拍的科教片看到,具体名字忘了。Pro Android 4.0中说陀螺仪的误差会慢慢积累,因此通与加速传感器一致使用,通过Kalman
filter进行修正。我们只简单地进行陀螺仪数据的读取。小例子和之前的很相似,我们只提供不同部分的代码片段。
public class GyroscopeSensorActivity extends Activity implements SensorEventListener{
……
@Override
protected void onCreate(Bundle savedInstanceState) {
……
sensorManager = (SensorManager)getSystemService(SENSOR_SERVICE);
sensor = sensorManager.getDefaultSensor(Sensor.TYPE_GYROSCOPE);
}
…… //注册和注销传感器的监听器
@Override
public void onAccuracyChanged(Sensor sensor, int accuracy) { … }
@Override /* 对于陀螺仪,测量的是x、y、z三个轴向的角速度,分别从values[0]、values[1]、values[2]中读取,单位为弧度/秒。*/
public void onSensorChanged(SensorEvent event) {
if(event.sensor.getType() == Sensor.TYPE_GYROSCOPE)
showInfo("事件:" + " x:" + event.values[0] + " y:" + event.values[1] + " z:" + event.values[2]);
}
//在华为P6的机器上,陀螺仪非常敏感,平放在桌面,由于电脑照成的轻微震动在不断地刷屏,为了避免写UI造成的性能问题,只写Log。
private void showInfo(String info){
//tv.append("\n" + info);
Log.d("陀螺仪",info);
}
}

加速度传感器(acceleration)
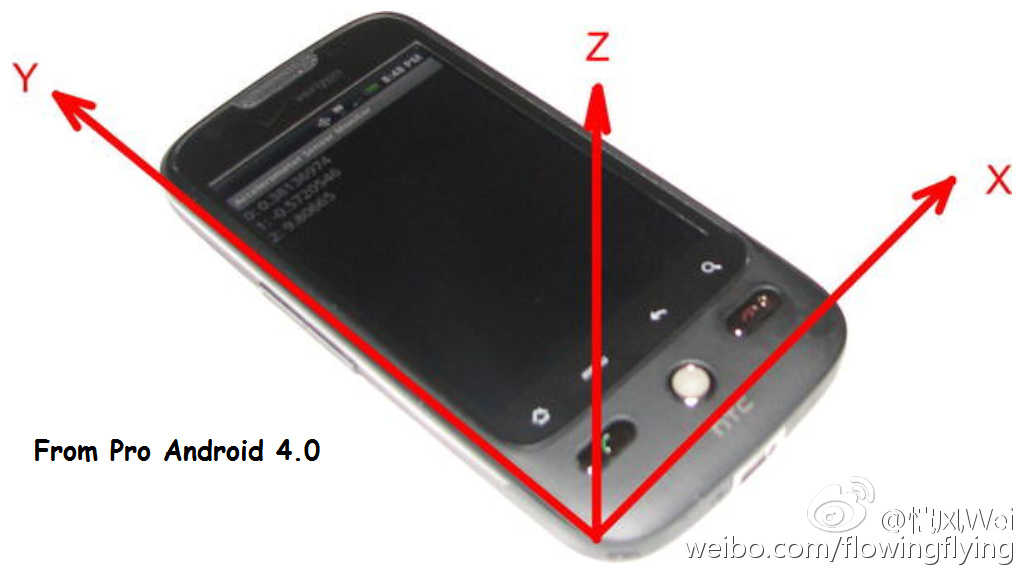
加速度测量传感器有x、y、z三轴,注意和2D屏幕的坐标,以左上角作为原点的,而且Y向下。注意区分这两个不同的坐标系。
加速传感器的单位是加速度m/s2。如果手机平放好,x,y在位置为0,而z轴方向加速度=当前z方向加速度-g。由于g(重力加速度)垂直向下,则g=-9.81m/s2,即z轴 a=0-(-9.81)=9.81m/s2。也就是自由落体是为0。x、y、z的测量的加速度分别位于value[0]、value[1]、value[2]。
相关的代码和前面大同小异,我们就不再重复,传感器类型为Sensor.TYPE_ACCELEROMETER。减去重力这很重要,当设备静止或者匀速运动时,可以获得设备的角度。

我记得至少两年前,单位请一互联网专家讲课,提到了AR(增强现实),问靠什么传感器,其答案为陀螺仪,这是不对的,陀螺仪可以测量运动过程中的角速度,但要测量手机本身的角度,这靠的是加速仪器,因为有重力方向作为校准。
Android也提供了检测手机旋转角度的API,用于UI绘制,实际靠的就是加速传感器。
WindowManager window = (WindowManager)getSystemService(WINDOW_SERVICE);
//返回值为Surface.ROTATION_0(0)、Surface.ROTATION_90(1)、Surface.ROTATION_180(2)和Surface.ROTATION_270(3),可以用来确定屏幕UI的旋转方向。注意:需要开启“自动旋转”才能有效检查,否则均为Surface.ROTATION_0(手机以竖屏为主,一般都会0,但不保证都如此)。不是所以的手机都能检测到这4个值,例如我的P6,没有Surface.ROTATION_180,即UI不支持倒过来,如果有某个数值不支持,通过getRotation()获取的数值可能并不准确,仍以P6为例,如果我们顺时针转90°,得到Surface.ROTATION_90,继续顺时针转至180°,无检测新数值,仍未Surface.ROTATION_90,再继续顺时针转90°(至270°),仍显示为Surface.ROTATION_90,而非Surface.ROTATION_270。
int rotation = window.getDefaultDisplay().getRotation(); //在Android2.2之前,为Display.getOrientation(),如果出现API和SDK 的API level相关,可通过Build.VERSION.SDK_INT获得。
我们将手机平放在桌子上,通过加速度测量仪的x、y、z轴的数值,x、y为0,z为g,可以进行判断,但是我们并不知道具体的朝向,平放是朝南还是向北,这需要地磁感应器,将在后面介绍。
下面的小例子,我们将对加速度测量仪的x,y,z数值进行修正处理,减去重力加速度,得到我们这个惯性系的加速度,并根据设备的Y轴与垂直地面方向(重力反方向)的夹角。相关的代码片段如下:
private float[] gravity = new float[3]; //重力在设备x、y、z轴上的分量
private float[] motion = new float[3]; //过滤掉重力后,加速度在x、y、z上的分量
private double ratioY;
private double angle;
private int counter = 1;
@Override
public void onSensorChanged(SensorEvent event) {
for(int i = 0 ; i < 3; i ++){
/* accelermeter是很敏感的,看之前小例子的log就知道。因为重力是恒力,我们移动设备,它的变化不会太快,不象摇晃手机这样的外力那样突然。因此通过low-pass filter对重力进行过滤。这个低通滤波器的权重,我们使用了0.1和0.9,当然也可以设置为0.2和0.8。 */
gravity[i] = (float) (0.1 * event.values[i] + 0.9 * gravity[i]);
motion[i] = event.values[i] - gravity[i];
}
//计算重力在Y轴方向的量,即G*cos(α)
ratioY = gravity[1]/SensorManager.GRAVITY_EARTH;
if(ratioY > 1.0)
ratioY = 1.0;
if(ratioY < -1.0)
ratioY = -1.0;
//获得α的值,根据z轴的方向修正其正负值。
angle = Math.toDegrees(Math.acos(ratioY));
if(gravity[2] < 0)
angle = - angle;
//避免频繁扫屏,每10次变化显示一次值
if(counter ++ % 10 == 0){
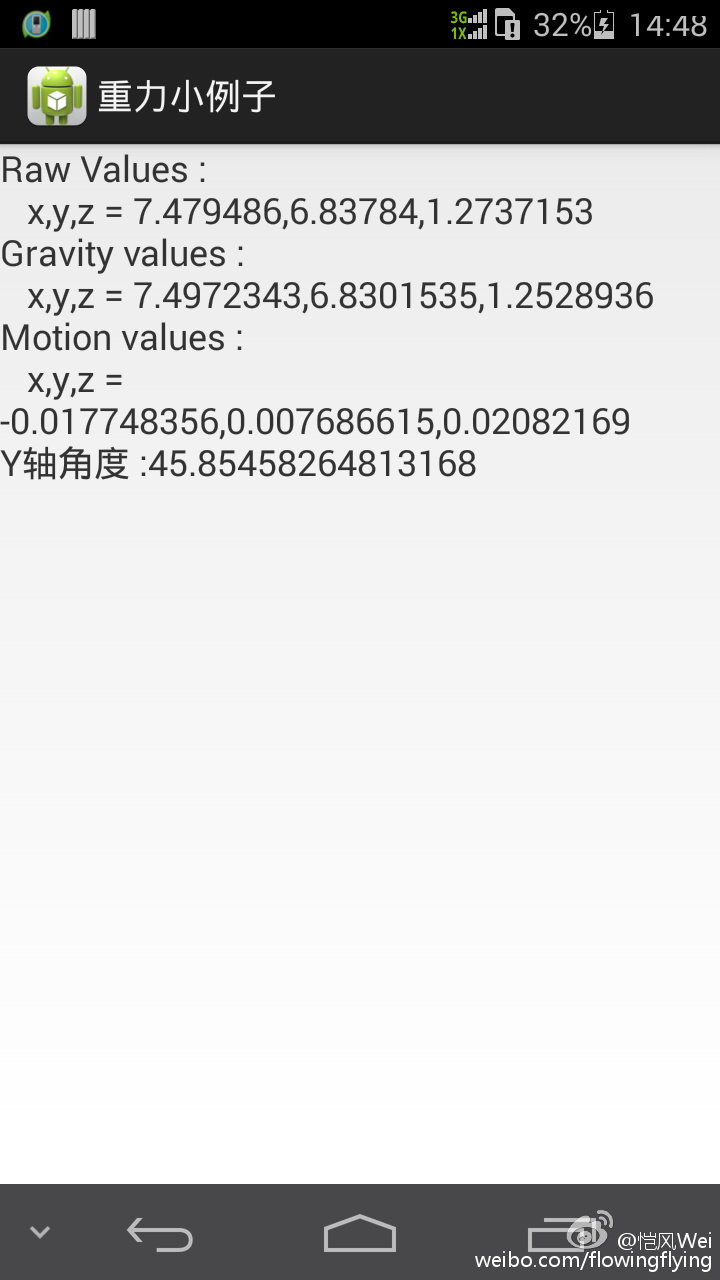
tv.setText("Raw Values : \n"
+ " x,y,z = "+ event.values[0] + "," + event.values[1] + "," + event.values[2] + "\n"
+ "Gravity values : \n"
+ " x,y,z = "+ gravity[0] + "," + gravity[1] + "," + gravity[2] + "\n"
+ "Motion values : \n"
+ " x,y,z = "+ motion[0] + "," + motion[1] + "," + motion[2] + "\n"
+ "Y轴角度 :" + angle );
tv.invalidate();
counter = 1;
}
}
……
motion[3]是过滤重力后的数值,如果各值如果非常接近0,表示设备没有被移动。
Pro Android学习笔记(一五四):传感器(4):陀螺仪、加速传感器的更多相关文章
- 【转】 Pro Android学习笔记(五四):调试和分析(2):View层次结构
目录(?)[-] 帮助性能分析 帮助精简UI设计 对于模拟器上的应用(非真实设备),可以查看Hierarchy View,如下图: 帮助性能分析 当我们选择某个view时,我们可以看到measurin ...
- 【转】 Pro Android学习笔记(七七):服务(2):Local Service
目录(?)[-] Local service代码 调用Local ServiceLocal Service client代码 AndroidManifestxml定义Serviceacitivty的l ...
- 【转】 Pro Android学习笔记(二九):用户界面和控制(17):include和merge
目录(?)[-] xml控件代码重用include xml控件代码重用merge 横屏和竖屏landsacpe portrait xml控件代码重用:include 如果我们定义一个控件,需要在不同的 ...
- 【转】Pro Android学习笔记(十二):了解Intent(下)
解析Intent,寻找匹配Activity 如果给出component名字(包名.类名)是explicit intent,否则是implicit intent.对于explicit intent,关键 ...
- Pro Android学习笔记 ActionBar(1):Home图标区
Pro Android学习笔记(四八):ActionBar(1):Home图标区 2013年03月10日 ⁄ 综合 ⁄ 共 3256字 ⁄ 字号 小 中 大 ⁄ 评论关闭 ActionBar在A ...
- 【转】 Pro Android学习笔记(八二):了解Package(1):包和进程
文章转载只能用于非商业性质,且不能带有虚拟货币.积分.注册等附加条件.转载须注明出处:http://blog.csdn.net/flowingflying/ 在之前,我们已经学习了如何签发apk,见P ...
- 【转】 Pro Android学习笔记(六七):HTTP服务(1):HTTP GET
目录(?)[-] HTTP GET小例子 简单小例子 出现异常NetworkOnMainThreadException 通过StrictMode进行处理 URL带键值对 Andriod应用可利用ser ...
- 【转】 Pro Android学习笔记(五五):调试和分析(3):adb命令、模拟器控制台和StrictMode
目录(?)[-] adb命令 模拟器Console StrictMode adb命令 我们在学习SQLite的使用,介绍过部分adb命令的使用,见Pro Android学习笔记(五):了解Conten ...
- 【转】 Pro Android学习笔记(五六):配置变化
目录(?)[-] Activity的destorycreate过程 Fragment的destorycreate过程 onSaveInstanceState saveFragmentInstanceS ...
- 【转】 Pro Android学习笔记(五二):ActionBar(5):list模式
可以在action bar中加入spinner的下来菜单,有关spinner,可以参考Pro Android学习笔记(二十):用户界面和控制(8):GridView和Spinner. list的样式和 ...
随机推荐
- 【BZOJ3218】a + b Problem 可持久化线段树优化建图
[BZOJ3218]a + b Problem 题解:思路很简单,直接最小割.S->i,容量为Bi:i->T,容量为Wi:所有符合条件的j->new,容量inf:new->i, ...
- 对于iPhone描述文件的签名认证
1.购买SSL证书验证(跟https认证一样) 2.iphone 签名.mobileconfig文件 company.mobileconfig 未签名的mobileconfig文件 server.cr ...
- LVS集群的负载调度
LVS集群的负载调度 章文嵩 (wensong@linux-vs.org) 转自LVS官方资料 2002 年 5 月 本文主要讲述了LVS集群的IP负载均衡软件IPVS在内核中实现的各种连接调度算法. ...
- go 包的问题
同一个包下的所有方法,都整合到一个里面去了,通过包名可以任意调用包下的方法. 文件夹的名字必须要和文件里面的package的名字一样,否则会报错... 导文件就是文件所在的包 导包import(),是 ...
- Vue 组件实例属性的使用
前言 因为最近面试了二.三十个人,发现大部分都还是只是停留在 Vue 文档的教程.有部分连教程这部分的文档也没看全.所以稍微写一点,让新上手的 Vuer 多了解 Vue 文档的其他更需要关注的点. 因 ...
- [HAOI2016]找相同子串
这题感觉有点坑啊. 题目还是不难想的,先对一个字符串建后缀自动机,然后拿另一个字符串在上面跑. 假设当前跑到了p点,匹配长度为len. 那么当前会对答案产生贡献的串是哪些呢? 显然当前会对p及p到根的 ...
- windows server 2008 + IIS 7.5实现多用户FTP(多账号对应不同目录
在windows server 2003 + IIS 6 的时候,就已经能实现多用户FTP的功能,不过设置有写繁琐,如果站点多的话,设置账号.权限这些东西都要搞很久.Windows server 20 ...
- codeforces 460C. Present 解题报告
题目链接:http://codeforces.com/submissions/ywindysai 题目意思:有 n 朵花,每朵花都有一定的高度(第 i 朵花对应 ai),m 天之后要把这些花送给别人. ...
- c#设置系统时间后不起作用
网上设置系统时间的代码很多,但是会出现设置后没有作用的问题 遇到以上问题可以按照如下办法解决 1.项目--属性--安全性--勾选启用ClickOne安全设置,如下图所示: 2.打开app.manife ...
- the art of seo(chapter two)
***Search Engine Basics*** *Understanding How Vertical Results Fit into the SERPs* As a direct conse ...