JZ2440 裸机驱动 第5章 GPIO接口



#define GPFCON (*(volatile unsigned long *) 0x56000050)
#define GPFDAT (*(volatile unsigned long *) 0x56000054)
#define GPF4_out (1 << 4*2)
GPFCON = GPF4_out; //GPF4引脚设为输出
GPFDAT &= ~( << ); //GPF4输出低电平
GPF4 配置
.text
.global _start
_start:
LDR R0,=0x56000050 @R0设为GPFCON寄存器
MOV R1, #0x00000100 @0b
STR R1,[R0] @设置GPF4为输出口,位[:] =
LDR R0,=0x56000054 @R0设置GPFDAT寄存器
MOV R1, #0x0000000 @此值改为0x00000010( )可以让LED全熄灭
STR R1,[R0] @GPF4输出0,点亮LED
MAIN_LOOP:
B MAIN_LOOP
led_on.S
led_on.bin:led_on.S @make指令比较led_on.bin和led_on.S的时间,决定是否执行下面的命令
arm-linux-gcc -g -c -o led_on.o led_on.S @编译
arm-linux-ld -Ttext 0x0000 -g led_on.o -o led_on_elf @链接
arm-linux-objcopy -O binary -S led_on_elf led_on.bin @把ELF格式的可执行文件led_on_elf转换成二进制格式文件led_on.bin
clean:
rm -f led_on.bin led_on_elf *.o
Makefile
@************************************
@File:crt0.S
@功能:通过它转入C程序
@************************************
.text
.global _start
_start:
ldr r0, =0x56000010 @WATCHDOG寄存器地址
mov r1, #0x0
str r1, [r0] @写入0,禁止WATCHDOG ldr sp, =* @设置堆栈,注意不能大于4k,因为现在可用内存只有4kB
@NAND Flash中的代码在复位后会移到内部ram(只有4kB)
bl main
halt_loop:
b halt_loop
crt0.S
#define GPFCON (*(volatile unsigned long *) 0x56000050)
#define GPFDAT (*(volatile unsigned long *) 0x56000054)
#define GPF4_out (1 << 4*2) int main()
{
GPFCON = GPF4_out; //GPF4引脚设为输出
GPFDAT &= ~( << ); //GPF4输出低电平 return ;
}
led_on_c.c
led_on_c.bin:crt0.S led_on_c.c
arm-linux-gcc -g -c -o crt0.o crt0.S
arm-linux-gcc -g -c -o led_on_c.o led_on_c.c
arm-linux-ld -Ttext 0x0000000 -g crt0.o led_on_c.o -o led_on_c_elf
arm-linux-objcopy -O binary -S led_on_c_elf led_on_c.bin
arm-linux-objdump -D -m arm led_on_c_elf > led_on_c.dis
clean:
rm -f led_on_c.dis led_on_c.bin led_on_c_elf *.o
Makefile
#define GPFCON (*(volatile unsigned long *)0x56000050)
#define GPFDAT (*(volatile unsigned long *)0x56000054) #define GPGCON (*(volatile unsigned long *)0x56000060)
#define GPGDAT (*(volatile unsigned long *)0x56000064) /*
* LED1,LED2,LED4对应GPF4、GPF5、GPF6
*/
#define GPF4_out (1<<(4*2))
#define GPF5_out (1<<(5*2))
#define GPF6_out (1<<(6*2)) #define GPF4_msk (3<<(4*2))
#define GPF5_msk (3<<(5*2))
#define GPF6_msk (3<<(6*2)) /*
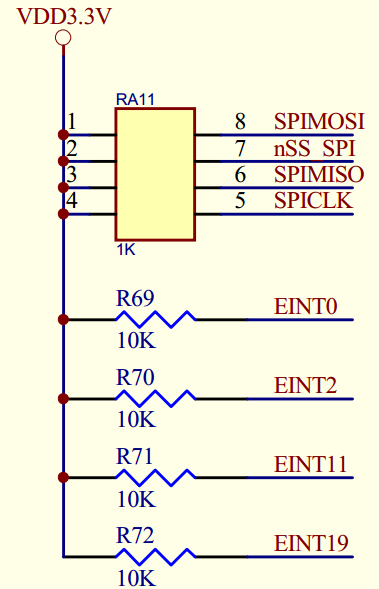
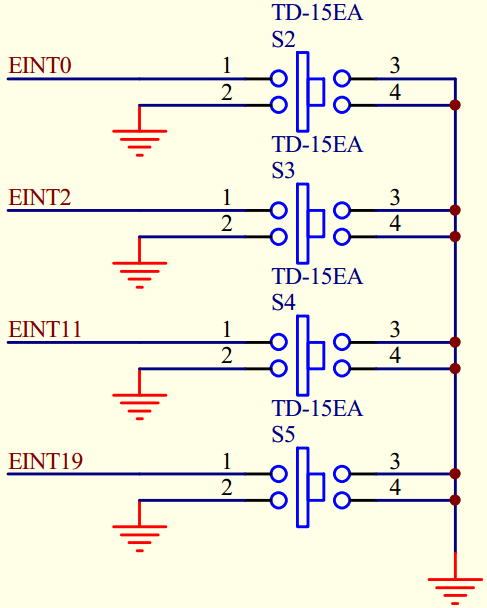
* S2,S3,S4对应GPF0、GPF2、GPG3
*/
#define GPF0_in (0<<(0*2))
#define GPF2_in (0<<(2*2))
#define GPG3_in (0<<(3*2)) #define GPF0_msk (3<<(0*2))
#define GPF2_msk (3<<(2*2))
#define GPG3_msk (3<<(3*2)) int main()
{
unsigned long dwDat;
// LED1,LED2,LED4对应的3根引脚设为输出
GPFCON &= ~(GPF4_msk | GPF5_msk | GPF6_msk);
GPFCON |= GPF4_out | GPF5_out | GPF6_out; // S2,S3对应的2根引脚设为输入
GPFCON &= ~(GPF0_msk | GPF2_msk);
GPFCON |= GPF0_in | GPF2_in; // S4对应的引脚设为输入
GPGCON &= ~GPG3_msk;
GPGCON |= GPG3_in; while(){
//若Kn为0(表示按下),则令LEDn为0(表示点亮)
dwDat = GPFDAT; // 读取GPF管脚电平状态 if (dwDat & (<<)) // S2没有按下
GPFDAT |= (<<); // LED1熄灭
else
GPFDAT &= ~(<<); // LED1点亮 if (dwDat & (<<)) // S3没有按下
GPFDAT |= (<<); // LED2熄灭
else
GPFDAT &= ~(<<); // LED2点亮 dwDat = GPGDAT; // 读取GPG管脚电平状态 if (dwDat & (<<)) // S4没有按下
GPFDAT |= (<<); // LED3熄灭
else
GPFDAT &= ~(<<); // LED3点亮
} return ;
}
key_led_on.c
JZ2440 裸机驱动 第5章 GPIO接口的更多相关文章
- JZ2440 裸机驱动 第12章 I2C接口
本章目标: 了解I2C总线协议: 掌握S3C2410/S3C2440中I2C接口的使用方法: 12.1 I2C总线协议及硬件介绍 12.1.1 I2C总线协议 1 I2C总线的概念 2 I2C总线的信 ...
- JZ2440 裸机驱动 第14章 ADC和触摸屏接口
本章目标: 了解S3C2410/S3C2440和触摸屏的结构: 了解电阻触摸屏的工作原理和等效电路图: 了解S3C2410/S3C2440触摸屏控制器的多种工作模式: ...
- JZ2440 裸机驱动 第13章 LCD控制器(1)
本章目标 了解LCD显示器的接口及时序: 掌握S3C2410/S3C2440 LCD控制器的使用方法: 了解帧缓冲区的概念,掌握如何设置帧缓冲区来显示图像: 13.1 LCD和LCD控制器 13.1 ...
- JZ2440 裸机驱动 第10章 系统时钟和定时器
本章目标 了解S3C2410/S3C2440的时钟体系结构 掌握通过设置MPLL改变系统时钟的方法 掌握在不同的频率下设置存储控制器的方法 掌握PWM定时器的用法 ...
- JZ2440 裸机驱动 第6章 存储控制器
本章目标: 了解S3C2410/S3C2440地址空间的布局 掌握如何通过总线形式访问扩展的外设,比如内存.NOR Flash.网卡等 ························ ...
- JZ2440 裸机驱动 第13章 LCD控制器(2)
13.2 TFT LCD显示实例 13.2.1 程序设计 本实例的目的是从串口输出一个菜单,从中选择各种方法进行测试,比如画线. 画圆.显示单色.使用调色板等. 13.2.2代码详解 ...
- JZ2440 裸机驱动 第9章 中断体系结构
本章目标: 了解ARM体系CPU的7种工作模式 了解S3C2410/S3C2440中断体系结构 掌握S3C2410/S3C2440的中断服务程序的编写方法 9.1 S3C241 ...
- JZ2440 裸机驱动 第8章 NAND Flash控制器
本章目标 了解NAND Flash 芯片的接口 掌握通过NAND Flash控制器访问NAND Flash的方法 8.1 NAND Flash介绍和NAND Flash控制器使用 NAND ...
- JZ2440 裸机驱动 第7章 内存管理单元MMU
本章目标: 了解虚拟地址和物理地址的关系: 掌握如何通过设置MMU来控制虚拟地址到物理地址的转化: 了解MMU的内存访问权限机制: 了解TLB.Cache.Write ...
随机推荐
- STM32端口输入输出模式配置
STM32的IO口模式配置 根据数据手册提供的信息,stm32的io口一共有八种模式,他们分别是: 四种输入模式 上拉输入:通过内部的上拉电阻将一个不确定的信号通过一个电阻拉到高电平. 下拉输入:把电 ...
- HDU 4725 The Shortest Path in Nya Graph(最短路建边)题解
题意:给你n个点,m条无向边,每个点都属于一个层,相邻层的任意点都能花费C到另一层任意点,问你1到n最小路径 思路:没理解题意,以为每一层一个点,题目给的是第i个点的层数编号.这道题的难点在于建边,如 ...
- Maven编译的时候加载本地路径jar
大家都知道Maven的依赖是通过pom文件管理的,只要配置了<dependency>,Maven就会从本地仓库 -> 远程仓库 -> 中央仓库获取依赖的jar. 但是如果仓库中 ...
- Gym 101334E Exploring Pyramids(dp+乘法原理)
http://codeforces.com/gym/101334 题意: 给出一棵多叉树,每个结点的任意两个子节点都有左右之分.从根结点开始,每次尽量往左走,走不通了就回溯,把遇到的字母顺次记录下来, ...
- 51Nod 1686 第K大区间(离散化+尺取法)
http://www.51nod.com/onlineJudge/questionCode.html#!problemId=1686 题意: 思路: 第K大值,所以可以考虑二分法,然后用尺取法去扫描, ...
- UVa 11538 象棋中的皇后
https://vjudge.net/problem/UVA-11538 题意: n×m的棋盘,有多少种方法放置两个相互攻击的皇后? 思路: 这两个皇后互相攻击的方式只有3种,在同一行,在同一列,或在 ...
- 依据分辨率区分手机、平板、pc
/*手机*/ @media screen and (max-width:600px){ #header,#content,#footer{width:400px;} .right,.center{ma ...
- windows下利用批处理命令生成maven项目(java、javaWeb)
觉得用IDE生成maven项目会卡住,很慢.就用cmd写了个cmd批处理命令来生成maven项目.效果如下 生成项目导入idea后结构如下 批处理命令代码如下 @echo off ::echo 请选择 ...
- Spring Boot安装
Spring引导依赖项groupId使用org.springframework.boot. 通常Maven POM文件将继承自spring-boot-starter-parent项目,并将依赖性声明为 ...
- EPANET头文件解读系列4——EPANET2.H
该头文件的功能与系列3中的TOOLKIT.H类似,而且内容也几乎一致,所以也就不再详细介绍.