用自己的机器人和ubuntu PC实现通信和控制--26
原创博客:转载请表明出处:http://www.cnblogs.com/zxouxuewei/
前提: 1.拥有一台能够采用手动或者自动移动的机器人移动平台。
2.在电机端需要安装高分辨率的霍尔编码器。
3.在终端控制板上有基本的电机PWM控制,PID电机补偿调速。编码器输入捕获,串口数据收发的驱动。
以下是我的机器人:

控制思路如下:
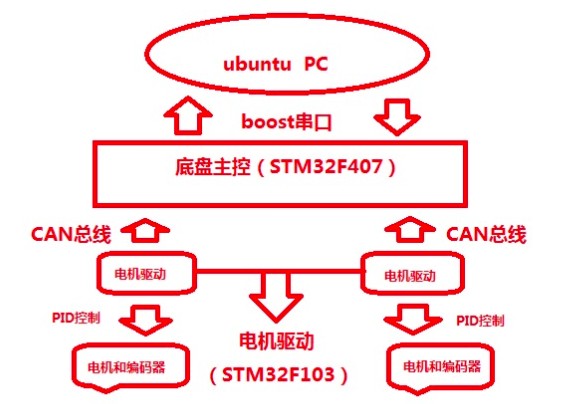
1.电机驱动板获取编码器的数据通过CAN总线透传给地盘主控。地盘主控解析编码器的数据计算出X方向上的线速度和Z轴上的角速度,通过串口上传到ubuntuPC机上。源码如下:(采用定时器方式计算速度)
struct Encoder_{
float d_left;
float d_right;int enc_left; //wheel encoder readings
int enc_right;
int left; // actual values coming back from robot
int right;
}self;
float d,th;
#define ticks_meter 123077.0 //每米编码器的值 linear = 2.6
#define base_width 0.31f; //轴距 angule = 0.316
#define robot_timer 0.53f //周期
union Max_Value
{
unsigned char buf[12];
struct _Float_{
float hander;
float _float_vx;
float _float_vth;
}Float_RAM;
}Send_Data;
extern int encoder_0;
extern int encoder_1;
void Updata_velocities_Data()
{
u8 i=0;
self.right = encoder_0;//编码器的累计量
self.left = encoder_1;
if(self.enc_left == 0)
{
self.d_left = 0;
self.d_right = 0;
}
else
{
self.d_left = (self.left - self.enc_left) / ticks_meter;
self.d_right = (self.right - self.enc_right) / ticks_meter;
}
self.enc_left = self.left;
self.enc_right = self.right;
d = ( self.d_left + self.d_right ) / 2; //distance traveled is the average of the two wheels
th = ( self.d_right - self.d_left ) / base_width; //this approximation works (in radians) for small angles
self.dx = d / robot_timer; //calculate velocities
self.dr = th / robot_timer;
Send_Data.Float_RAM.hander = 15.5;
Send_Data.Float_RAM._float_vx = self.dx;
Send_Data.Float_RAM._float_vth = self.dr;
for(i=0;i<12;i++)
sendchar_usart1(Send_Data.buf[i]);
}
2.在ubuntu PC端通过boost串口接收数据时。对串口进行读取 即可。在此节点中我们需要发布从下位机获取的速度信息,还要监听/cmd_vel话题下的移动数据,发送到下位机。代码如下:
#include <ros/ros.h>
#include <sensor_msgs/JointState.h>
#include <tf/transform_broadcaster.h>
#include <nav_msgs/Odometry.h>
#include <iostream>
#include <iomanip>
#include <boost/asio.hpp>
#include <boost/bind.hpp>
#include <math.h> using namespace std;
using namespace boost::asio; ros::Time current_time, last_time;
double x = 0.0;
double y = 0.0;
double th = 0.0;
double vx = 0.0;
double vy = 0.0;
double vth = 0.0; union _SPEED_
{
unsigned char speed_buf[16];
struct _speed_value_
{
float flag;
float left_vel;
float yspeed_vel;
float right_vel;
}Struct_Speed;
}Union_Speed; geometry_msgs::Quaternion odom_quat; void cmd_velCallback(const geometry_msgs::Twist &twist_aux)
{
geometry_msgs::Twist twist = twist_aux;
Union_Speed.Struct_Speed.flag = 15.5;
Union_Speed.Struct_Speed.left_vel = twist_aux.linear.x;
Union_Speed.Struct_Speed.yspeed_vel = 0.0;
Union_Speed.Struct_Speed.right_vel = twist_aux.angular.z;
} double dt = 0.0; union _Data_
{
unsigned char buf_rev[12];
struct _value_encoder_
{
float Flag_Float;
float VX_speed;
float VZ_speed;
}Struct_Encoder;
}Union_Data; int main(int argc, char** argv)
{
unsigned char check_buf[1];
unsigned char i;
io_service iosev;
serial_port sp(iosev, "/dev/ttyUSB0");
sp.set_option(serial_port::baud_rate(115200));
sp.set_option(serial_port::flow_control(serial_port::flow_control::none));
sp.set_option(serial_port::parity(serial_port::parity::none));
sp.set_option(serial_port::stop_bits(serial_port::stop_bits::one));
sp.set_option(serial_port::character_size(8));
ros::init(argc, argv, "base_controller");
ros::NodeHandle n;
ros::Subscriber cmd_vel_sub = n.subscribe("cmd_vel", 50, cmd_velCallback);
ros::Publisher odom_pub = n.advertise<nav_msgs::Odometry>("odom", 50);
tf::TransformBroadcaster odom_broadcaster;
while(ros::ok())
{
current_time = ros::Time::now();
ros::spinOnce();
dt = (current_time - last_time).toSec();
last_time = ros::Time::now();
current_time = ros::Time::now();
read(sp, buffer(Union_Data.buf_rev));
if(Union_Data.Struct_Encoder.Flag_Float == 15.5)
{
vx = Union_Data.Struct_Encoder.VX_speed;
vth = Union_Data.Struct_Encoder.VZ_speed;
ROS_INFO("msg_encoder.angular_z is %f",vth);
ROS_INFO("msg_encoder.linear.x is %f",vx);
}
else
{
ROS_INFO("Fucking communication fails,The fuck can i hurry up to restart!");
read(sp, buffer(check_buf));
}
write(sp, buffer(Union_Speed.speed_buf,16));
double delta_x = (vx * cos(th) - vy * sin(th)) * dt;
double delta_y = (vx * sin(th) + vy * cos(th)) * dt;
double delta_th = vth * dt;
x += delta_x;
y += delta_y;
th += delta_th;
geometry_msgs::Quaternion odom_quat = tf::createQuaternionMsgFromYaw(th);
geometry_msgs::TransformStamped odom_trans;
odom_trans.header.stamp = current_time;
odom_trans.header.frame_id = "odom";
odom_trans.child_frame_id = "base_link"; odom_trans.transform.translation.x = x;
odom_trans.transform.translation.y = y;
odom_trans.transform.translation.z = 0.0;
odom_trans.transform.rotation = odom_quat;
odom_broadcaster.sendTransform(odom_trans);
nav_msgs::Odometry odom;
odom.header.stamp = current_time;
odom.header.frame_id = "odom";
odom.pose.pose.position.x = x;
odom.pose.pose.position.y = y;
odom.pose.pose.position.z = 0.0;
odom.pose.pose.orientation = odom_quat;
odom.child_frame_id = "base_link";
odom.twist.twist.linear.x = vx;
odom.twist.twist.linear.y = vy;
odom.twist.twist.angular.z = vth;
odom_pub.publish(odom);
last_time = current_time;
}
iosev.run();
}
然后测试如下:打开你的机器人,和ubuntu PC 确保串口线链接。然后运行所需的节点:
roscore &
rosrun odom_tf_package tf_broadcaster_node
rviz
rosrun rbx1_nav timed_out_and_back.py //此节点为turtlebot的damo
在tf_broadcaster_node节点下的调试输出如下:
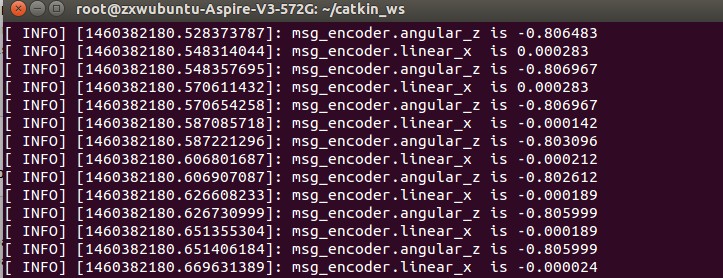
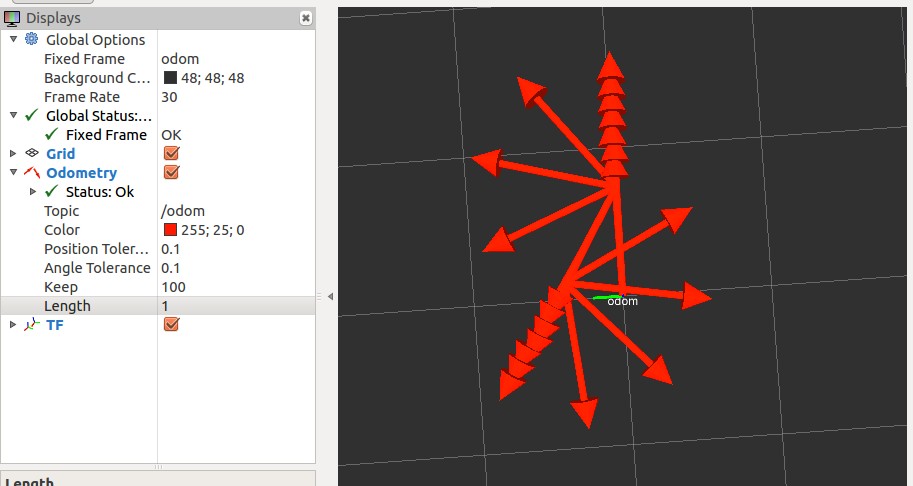
rviz视图中查看机器人入下:
用自己的机器人和ubuntu PC实现通信和控制--26的更多相关文章
- 基于FPGA的红外遥控解码与PC串口通信
基于FPGA的红外遥控解码与PC串口通信 zouxy09@qq.com http://blog.csdn.net/zouxy09 这是我的<电子设计EDA>的课程设计作业(呵呵,这个月都拿 ...
- PC蓝牙通信C#代码实现
PC蓝牙通信C#代码实现 这篇文章主要为大家详细介绍了PC蓝牙通信C#代码实现,具有一定的参考价值,感兴趣的小伙伴们可以参考一下 本文实例为大家分享了C#实现PC蓝牙通信代码,供大家参考,具体内容如下 ...
- 小黄鸡机器人和小I机器人的调用
<?php //---------------------------------聊天小机器人类---------------------------------------------- ...
- 18-09-13 机器人和服务器之间的ip配置和脚本的重启
问题9 服务器安装完毕后 怎么配置机器人客户端的配置ip
- ROS----TUT-RIM协作机器人和Actin-ROS接口
TUT-RIM: Collaborative Intelligent Heavy Machinery and Robotics http://www.ros.org/news/2017/02/tutr ...
- 30行python让图灵机器人和茉莉机器人无止尽的瞎扯蛋
首先注册申请图灵机器人的API: http://www.tuling123.com/ 查看一下API的格式,很简单: { "key": "APIKEY", &q ...
- 公司内网机器vm ubuntu proxy 设置
解决浏览器上网问题: System Setting -> Network -> Network Proxy设置公司的代理 解决apt联网问题: 在/etc/apt/apt.conf文件里加 ...
- Ubuntu 12 安装 MySQL 5.6.26 及 问题汇总
参考先前的文章:Ubuntu 14 编译安装 PHP 5.4.45 + Nginx 1.4.7 + MySQL 5.6.26 笔记 安装过程: #安装依赖库 sudo apt-get install ...
- 八、mini2440裸机程序之UART(2)UART0与PC串口通信【转】
转自:http://blog.csdn.net/shengnan_wu/article/details/8309417 版权声明:本文为博主原创文章,未经博主允许不得转载. 1.相关原理图 2.相关寄 ...
随机推荐
- 改变Chrome浏览器主程序_缓存_个人信息路径
改变Chrome浏览器缓存_个人信息路径(亲测) actionx2上传于2012-10-26|(7人评价)|3077人阅读|41次下载|文档简介|举报文档 在手机打开 改变 Chrom ...
- JQery w3school学习第一章 标签的隐藏和显示
鄙人初学JQuery,最关键的是JQuery获取标签对象的方式 这一章学习的是点击按钮让所有标签的文字以及标签栏的位置隐藏起来,因为单纯的隐藏文字,还是会有空格和空行的影响 这里最关键的代码就是 $( ...
- bzoj 2154 莫比乌斯反演求lcm的和
题目大意: 表格中每一个位置(i,j)填的值是lcm(i,j) , 求n*m的表格值有多大 论文贾志鹏线性筛中过程讲的很好 最后的逆元我利用的是欧拉定理求解的 我这个最后线性扫了一遍,勉强过了,效率不 ...
- virtualbox安装提示出现严重错误解决办法
解决办法: 在服务里面启动1. Device Install Service2. Device Setup Manager 这两个服务就好了.也有可能只需要启动第一个.
- ByteArray
ByteArray:属性endian:String == Endian.BIG_ENDIAN/Endian.LITTLE_ENDIAN.length:uint ByteArray的字节数positio ...
- .net 小技巧
简单提示效果: <input runat="server" type="text" id="SelPerson" value=&quo ...
- SharePoint开发 - 自定义导航菜单(三)附其他代码
博客地址 http://blog.csdn.net/foxdave 接上篇点击打开链接 LeftNavGroupTemplate.cs internal class LeftNavGroupTempl ...
- 自定义的BroadCastReceiver
1.MainActivity2.java中的代码,主要是使用意图发送广播 public class MainActivity2 extends Activity{ @Override protecte ...
- hdu 2042
Ps:...好简单的一道题...直接AC,就是利用递归 代码: #include "stdio.h"int find(int num,int n);int main(){ int ...
- 排版字号对应多少pt
各字号对应多少pt?初号= 42pt: 小初号= 36pt: 一号= 26pt: 二号= 22pt: 小二号= 18pt: 三号= 16pt: 四号= 14pt: 小四号= 12pt: 五号= 10. ...