深度Q网络:DQN项目实战CartPole-v0
摘要:相比于Q learning,DQN本质上是为了适应更为复杂的环境,并且经过不断的改良迭代,到了Nature DQN(即Volodymyr Mnih发表的Nature论文)这里才算是基本完善。
本文分享自华为云社区《强化学习从基础到进阶-案例与实践[4.1]:深度Q网络-DQN项目实战CartPole-v0》,作者: 汀丶 。
1、定义算法
相比于Q learning,DQN本质上是为了适应更为复杂的环境,并且经过不断的改良迭代,到了Nature DQN(即Volodymyr Mnih发表的Nature论文)这里才算是基本完善。DQN主要改动的点有三个:
- 使用深度神经网络替代原来的Q表:这个很容易理解原因
- 使用了经验回放(Replay Buffer):这个好处有很多,一个是使用一堆历史数据去训练,比之前用一次就扔掉好多了,大大提高样本效率,另外一个是面试常提到的,减少样本之间的相关性,原则上获取经验跟学习阶段是分开的,原来时序的训练数据有可能是不稳定的,打乱之后再学习有助于提高训练的稳定性,跟深度学习中划分训练测试集时打乱样本是一个道理。
- 使用了两个网络:即策略网络和目标网络,每隔若干步才把每步更新的策略网络参数复制给目标网络,这样做也是为了训练的稳定,避免Q值的估计发散。想象一下,如果当前有个transition(这个Q learning中提过的,一定要记住!!!)样本导致对Q值进行了较差的过估计,如果接下来从经验回放中提取到的样本正好连续几个都这样的,很有可能导致Q值的发散(它的青春小鸟一去不回来了)。再打个比方,我们玩RPG或者闯关类游戏,有些人为了破纪录经常Save和Load,只要我出了错,我不满意我就加载之前的存档,假设不允许加载呢,就像DQN算法一样训练过程中会退不了,这时候是不是搞两个档,一个档每帧都存一下,另外一个档打了不错的结果再存,也就是若干个间隔再存一下,到最后用间隔若干步数再存的档一般都比每帧都存的档好些呢。当然你也可以再搞更多个档,也就是DQN增加多个目标网络,但是对于DQN则没有多大必要,多几个网络效果不见得会好很多。
1.1 定义模型
import paddle
import paddle.nn as nn
import paddle.nn.functional as F
!pip uninstall -y parl
!pip install parl
import parl
from parl.algorithms import DQN
class MLP(parl.Model):
""" Linear network to solve Cartpole problem.
Args:
input_dim (int): Dimension of observation space.
output_dim (int): Dimension of action space.
"""
def __init__(self, input_dim, output_dim):
super(MLP, self).__init__()
hidden_dim1 = 256
hidden_dim2 = 256
self.fc1 = nn.Linear(input_dim, hidden_dim1)
self.fc2 = nn.Linear(hidden_dim1, hidden_dim2)
self.fc3 = nn.Linear(hidden_dim2, output_dim)
def forward(self, state):
x = F.relu(self.fc1(state))
x = F.relu(self.fc2(x))
x = self.fc3(x)
return x
1.2 定义经验回放
from collections import deque
class ReplayBuffer:
def __init__(self, capacity: int) -> None:
self.capacity = capacity
self.buffer = deque(maxlen=self.capacity)
def push(self,transitions):
'''_summary_
Args:
trainsitions (tuple): _description_
'''
self.buffer.append(transitions)
def sample(self, batch_size: int, sequential: bool = False):
if batch_size > len(self.buffer):
batch_size = len(self.buffer)
if sequential: # sequential sampling
rand = random.randint(0, len(self.buffer) - batch_size)
batch = [self.buffer[i] for i in range(rand, rand + batch_size)]
return zip(*batch)
else:
batch = random.sample(self.buffer, batch_size)
return zip(*batch)
def clear(self):
self.buffer.clear()
def __len__(self):
return len(self.buffer)
1.3 定义智能体
from random import random
import parl
import paddle
import math
import numpy as np
class DQNAgent(parl.Agent):
"""Agent of DQN.
"""
def __init__(self, algorithm, memory,cfg):
super(DQNAgent, self).__init__(algorithm)
self.n_actions = cfg['n_actions']
self.epsilon = cfg['epsilon_start']
self.sample_count = 0
self.epsilon_start = cfg['epsilon_start']
self.epsilon_end = cfg['epsilon_end']
self.epsilon_decay = cfg['epsilon_decay']
self.batch_size = cfg['batch_size']
self.global_step = 0
self.update_target_steps = 600
self.memory = memory # replay buffer
def sample_action(self, state):
self.sample_count += 1
# epsilon must decay(linear,exponential and etc.) for balancing exploration and exploitation
self.epsilon = self.epsilon_end + (self.epsilon_start - self.epsilon_end) * \
math.exp(-1. * self.sample_count / self.epsilon_decay)
if random.random() < self.epsilon:
action = np.random.randint(self.n_actions)
else:
action = self.predict_action(state)
return action
def predict_action(self, state):
state = paddle.to_tensor(state , dtype='float32')
q_values = self.alg.predict(state) # self.alg 是自带的算法
action = q_values.argmax().numpy()[0]
return action
def update(self):
"""Update model with an episode data
Args:
obs(np.float32): shape of (batch_size, obs_dim)
act(np.int32): shape of (batch_size)
reward(np.float32): shape of (batch_size)
next_obs(np.float32): shape of (batch_size, obs_dim)
terminal(np.float32): shape of (batch_size)
Returns:
loss(float)
"""
if len(self.memory) < self.batch_size: # when transitions in memory donot meet a batch, not update
return
if self.global_step % self.update_target_steps == 0:
self.alg.sync_target()
self.global_step += 1
state_batch, action_batch, reward_batch, next_state_batch, done_batch = self.memory.sample(
self.batch_size)
action_batch = np.expand_dims(action_batch, axis=-1)
reward_batch = np.expand_dims(reward_batch, axis=-1)
done_batch = np.expand_dims(done_batch, axis=-1)
state_batch = paddle.to_tensor(state_batch, dtype='float32')
action_batch = paddle.to_tensor(action_batch, dtype='int32')
reward_batch = paddle.to_tensor(reward_batch, dtype='float32')
next_state_batch = paddle.to_tensor(next_state_batch, dtype='float32')
done_batch = paddle.to_tensor(done_batch, dtype='float32')
loss = self.alg.learn(state_batch, action_batch, reward_batch, next_state_batch, done_batch)
2、定义训练
def train(cfg, env, agent):
''' 训练
'''
print(f"开始训练!")
print(f"环境:{cfg['env_name']},算法:{cfg['algo_name']},设备:{cfg['device']}")
rewards = [] # record rewards for all episodes
steps = []
for i_ep in range(cfg["train_eps"]):
ep_reward = 0 # reward per episode
ep_step = 0
state = env.reset() # reset and obtain initial state
for _ in range(cfg['ep_max_steps']):
ep_step += 1
action = agent.sample_action(state) # sample action
next_state, reward, done, _ = env.step(action) # update env and return transitions
agent.memory.push((state, action, reward,next_state, done)) # save transitions
state = next_state # update next state for env
agent.update() # update agent
ep_reward += reward #
if done:
break
steps.append(ep_step)
rewards.append(ep_reward)
if (i_ep + 1) % 10 == 0:
print(f"回合:{i_ep+1}/{cfg['train_eps']},奖励:{ep_reward:.2f},Epislon: {agent.epsilon:.3f}")
print("完成训练!")
env.close()
res_dic = {'episodes':range(len(rewards)),'rewards':rewards,'steps':steps}
return res_dic
def test(cfg, env, agent):
print("开始测试!")
print(f"环境:{cfg['env_name']},算法:{cfg['algo_name']},设备:{cfg['device']}")
rewards = [] # record rewards for all episodes
steps = []
for i_ep in range(cfg['test_eps']):
ep_reward = 0 # reward per episode
ep_step = 0
state = env.reset() # reset and obtain initial state
for _ in range(cfg['ep_max_steps']):
ep_step+=1
action = agent.predict_action(state) # predict action
next_state, reward, done, _ = env.step(action)
state = next_state
ep_reward += reward
if done:
break
steps.append(ep_step)
rewards.append(ep_reward)
print(f"回合:{i_ep+1}/{cfg['test_eps']},奖励:{ep_reward:.2f}")
print("完成测试!")
env.close()
return {'episodes':range(len(rewards)),'rewards':rewards,'steps':steps}
3、定义环境
OpenAI Gym中其实集成了很多强化学习环境,足够大家学习了,但是在做强化学习的应用中免不了要自己创建环境,比如在本项目中其实不太好找到Qlearning能学出来的环境,Qlearning实在是太弱了,需要足够简单的环境才行,因此本项目写了一个环境,大家感兴趣的话可以看一下,一般环境接口最关键的部分即使reset和step。
import gym
import paddle
import numpy as np
import random
import os
from parl.algorithms import DQN
def all_seed(env,seed = 1):
''' omnipotent seed for RL, attention the position of seed function, you'd better put it just following the env create function
Args:
env (_type_):
seed (int, optional): _description_. Defaults to 1.
'''
print(f"seed = {seed}")
env.seed(seed) # env config
np.random.seed(seed)
random.seed(seed)
paddle.seed(seed)
def env_agent_config(cfg):
''' create env and agent
'''
env = gym.make(cfg['env_name'])
if cfg['seed'] !=0: # set random seed
all_seed(env,seed=cfg["seed"])
n_states = env.observation_space.shape[0] # print(hasattr(env.observation_space, 'n'))
n_actions = env.action_space.n # action dimension
print(f"n_states: {n_states}, n_actions: {n_actions}")
cfg.update({"n_states":n_states,"n_actions":n_actions}) # update to cfg paramters
model = MLP(n_states,n_actions)
algo = DQN(model, gamma=cfg['gamma'], lr=cfg['lr'])
memory = ReplayBuffer(cfg["memory_capacity"]) # replay buffer
agent = DQNAgent(algo,memory,cfg) # create agent
return env, agent
4、设置参数
到这里所有qlearning模块就算完成了,下面需要设置一些参数,方便大家“炼丹”,其中默认的是笔者已经调好的~。另外为了定义了一个画图函数,用来描述奖励的变化。
import argparse
import seaborn as sns
import matplotlib.pyplot as plt
def get_args():
"""
"""
parser = argparse.ArgumentParser(description="hyperparameters")
parser.add_argument('--algo_name',default='DQN',type=str,help="name of algorithm")
parser.add_argument('--env_name',default='CartPole-v0',type=str,help="name of environment")
parser.add_argument('--train_eps',default=200,type=int,help="episodes of training") # 训练的回合数
parser.add_argument('--test_eps',default=20,type=int,help="episodes of testing") # 测试的回合数
parser.add_argument('--ep_max_steps',default = 100000,type=int,help="steps per episode, much larger value can simulate infinite steps")
parser.add_argument('--gamma',default=0.99,type=float,help="discounted factor") # 折扣因子
parser.add_argument('--epsilon_start',default=0.95,type=float,help="initial value of epsilon") # e-greedy策略中初始epsilon
parser.add_argument('--epsilon_end',default=0.01,type=float,help="final value of epsilon") # e-greedy策略中的终止epsilon
parser.add_argument('--epsilon_decay',default=200,type=int,help="decay rate of epsilon") # e-greedy策略中epsilon的衰减率
parser.add_argument('--memory_capacity',default=200000,type=int) # replay memory的容量
parser.add_argument('--memory_warmup_size',default=200,type=int) # replay memory的预热容量
parser.add_argument('--batch_size',default=64,type=int,help="batch size of training") # 训练时每次使用的样本数
parser.add_argument('--targe_update_fre',default=200,type=int,help="frequency of target network update") # target network更新频率
parser.add_argument('--seed',default=10,type=int,help="seed")
parser.add_argument('--lr',default=0.0001,type=float,help="learning rate")
parser.add_argument('--device',default='cpu',type=str,help="cpu or gpu")
args = parser.parse_args([])
args = {**vars(args)} # type(dict)
return args
def smooth(data, weight=0.9):
'''用于平滑曲线,类似于Tensorboard中的smooth
Args:
data (List):输入数据
weight (Float): 平滑权重,处于0-1之间,数值越高说明越平滑,一般取0.9
Returns:
smoothed (List): 平滑后的数据
'''
last = data[0] # First value in the plot (first timestep)
smoothed = list()
for point in data:
smoothed_val = last * weight + (1 - weight) * point # 计算平滑值
smoothed.append(smoothed_val)
last = smoothed_val
return smoothed
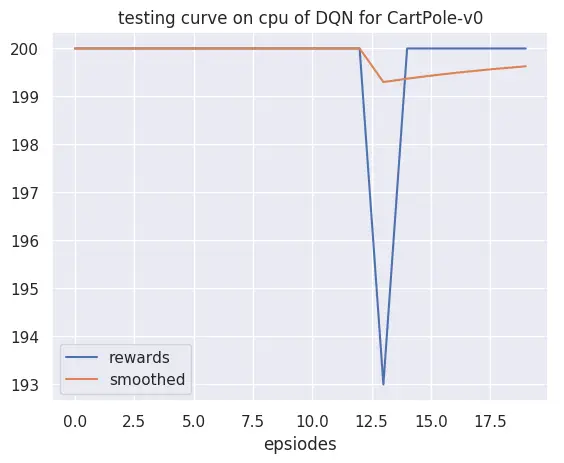
def plot_rewards(rewards,cfg,path=None,tag='train'):
sns.set()
plt.figure() # 创建一个图形实例,方便同时多画几个图
plt.title(f"{tag}ing curve on {cfg['device']} of {cfg['algo_name']} for {cfg['env_name']}")
plt.xlabel('epsiodes')
plt.plot(rewards, label='rewards')
plt.plot(smooth(rewards), label='smoothed')
plt.legend()
5、训练
# 获取参数
cfg = get_args()
# 训练
env, agent = env_agent_config(cfg)
res_dic = train(cfg, env, agent)
plot_rewards(res_dic['rewards'], cfg, tag="train")
# 测试
res_dic = test(cfg, env, agent)
plot_rewards(res_dic['rewards'], cfg, tag="test") # 画出结果
seed = 10
n_states: 4, n_actions: 2
开始训练!
环境:CartPole-v0,算法:DQN,设备:cpu
回合:10/200,奖励:10.00,Epislon: 0.062
回合:20/200,奖励:85.00,Epislon: 0.014
回合:30/200,奖励:41.00,Epislon: 0.011
回合:40/200,奖励:31.00,Epislon: 0.010
回合:50/200,奖励:22.00,Epislon: 0.010
回合:60/200,奖励:10.00,Epislon: 0.010
回合:70/200,奖励:10.00,Epislon: 0.010
回合:80/200,奖励:22.00,Epislon: 0.010
回合:90/200,奖励:30.00,Epislon: 0.010
回合:100/200,奖励:20.00,Epislon: 0.010
回合:110/200,奖励:15.00,Epislon: 0.010
回合:120/200,奖励:45.00,Epislon: 0.010
回合:130/200,奖励:73.00,Epislon: 0.010
回合:140/200,奖励:180.00,Epislon: 0.010
回合:150/200,奖励:167.00,Epislon: 0.010
回合:160/200,奖励:200.00,Epislon: 0.010
回合:170/200,奖励:165.00,Epislon: 0.010
回合:180/200,奖励:200.00,Epislon: 0.010
回合:190/200,奖励:200.00,Epislon: 0.010

深度Q网络:DQN项目实战CartPole-v0的更多相关文章
- DQN-深度Q网络
深度Q网络是用深度学习来解决强化中Q学习的问题,可以先了解一下Q学习的过程是一个怎样的过程,实际上就是不断的试错,从试错的经验之中寻找最优解 关于Q学习,我看到一个非常好的例子,另外知乎上面也有相关的 ...
- 学习推荐《精通Python网络爬虫:核心技术、框架与项目实战》中文PDF+源代码
随着大数据时代的到来,我们经常需要在海量数据的互联网环境中搜集一些特定的数据并对其进行分析,我们可以使用网络爬虫对这些特定的数据进行爬取,并对一些无关的数据进行过滤,将目标数据筛选出来.对特定的数据进 ...
- 洗礼灵魂,修炼python(73)--全栈项目实战篇(1)——【转载】前提准备之学习ubuntu
本篇是为项目实战做准备,学习Linux是必备的,不然都不好意思叫全栈对吧?下面是一位资深大神写的文章,够详细,我也不用浪费时间再写了 原文链接:Ubuntu学习——第一篇 内容: 一. Ubuntu简 ...
- PGL图学习之项目实践(UniMP算法实现论文节点分类、新冠疫苗项目实战,助力疫情)[系列九]
原项目链接:https://aistudio.baidu.com/aistudio/projectdetail/5100049?contributionType=1 1.图学习技术与应用 图是一个复杂 ...
- 【腾讯Bugly干货分享】React Native项目实战总结
本文来自于腾讯bugly开发者社区,非经作者同意,请勿转载,原文地址:http://dev.qq.com/topic/577e16a7640ad7b4682c64a7 “8小时内拼工作,8小时外拼成长 ...
- 【SSH项目实战三】脚本密钥的批量分发与执行
[SSH项目实战]脚本密钥的批量分发与执行 标签(空格分隔): Linux服务搭建-陈思齐 ---本教学笔记是本人学习和工作生涯中的摘记整理而成,此为初稿(尚有诸多不完善之处),为原创作品,允许转载, ...
- 【NFS项目实战二】NFS共享数据的时时同步推送备份
[NFS项目实战二]NFS共享数据的时时同步推送备份 标签(空格分隔): Linux服务搭建-陈思齐 ---本教学笔记是本人学习和工作生涯中的摘记整理而成,此为初稿(尚有诸多不完善之处),为原创作品, ...
- ABP大型项目实战(2) - 调试与排错 - 日志 - 查看审计日志
这是<ABP大型项目实战>系列文章的一篇. 项目发布到生产环境后难免会有错误. 那么如何进行调试和排错呢? 我看到俱乐部里有人是直接登陆生产服务器把数据库下载到开发机器进行调试排错 ...
- 强化学习系列之:Deep Q Network (DQN)
文章目录 [隐藏] 1. 强化学习和深度学习结合 2. Deep Q Network (DQN) 算法 3. 后续发展 3.1 Double DQN 3.2 Prioritized Replay 3. ...
- 【SSH项目实战】脚本密钥的批量分发与执行【转】
[TOC] 前言 <项目实战>系列为<linux实战教学笔记>第二阶段内容的同步教学配套实战练习,每个项目循序衔接最终将组成<Linux实战教学笔记>第二阶段核心教 ...
随机推荐
- 存储论——经济订货批量的R实现
存储论又称库存理论,是运筹学中发展较早的分支.早在 1915 年,哈李斯(F.Harris)针对银行货币的储备问题进行了详细的研究,建立了一个确定性的存贮费用模型,并求得了最佳批量公式.1934 年威 ...
- mysql的concat与concat_ws拼接字符串的使用
concat的使用 可以拼接多个字符 mysql> select concat(name,dept,job) from t1; +-----------------------+ | conca ...
- 【FINALE】NOIP2022 退役记 || THE END.
我的停课生活相册 - password:1007 目录 Day -4 Day -2 Day -1 Day 1 2022/11/26 NOIP 2022 OI 浅忆录 Day -4 好冷啊.有了那么点冬 ...
- LeeCode 动态规划(三)
完全背包问题 题目描述 有 n 件物品和容量为 w 的背包,给你两个数组 weights 和 values,分别表示第 i 件物品的重量和价值,每件物品可以放入多次,求解将哪些物品装入背包可使得物品价 ...
- 【c#表达式树】最完善的表达式树Expression.Dynamic的玩法
引言 在我第一次写博客的时候,写的第一篇文章,就是关于表达式树的,链接:https://www.cnblogs.com/1996-Chinese-Chen/p/14987967.html,其中,当时一 ...
- Nvidia GPU池化-远程GPU
1 背景 Nvidia GPU得益于在深度学习领域强大的计算能力,使其在数据中心常年处于绝对的统治地位.尽管借助GPU虚拟化实现多任务混布,提高了GPU的利用率,缓解了长尾效应,但是GPU利用率的绝对 ...
- Go For Web:踏入Web大门的第一步——Web 的工作方式
前言: 本文作为解决如何通过 Golang 来编写 Web 应用这个问题的前瞻,对 Golang 中的 Web 基础部分进行一个简单的介绍.目前 Go 拥有成熟的 Http 处理包,所以我们去编写一个 ...
- cocos2dx返回Android游戏黑屏解决办法
用来解决返回Android游戏加载资源时黑屏的问题.帖子过些日子估计就沉了,所以转出来,以供后面查询. 需要修改三个文件: 1) cocos2dx/platform/CCPlatformMacros. ...
- NC51101 Lost Cows
题目链接 题目 题目描述 \(N (2 \leq N \leq 8,000)\) cows have unique brands in the range 1..N. In a spectacular ...
- 2021-12-19:找到所有数组中消失的数字。 给你一个含 n 个整数的数组 nums ,其中 nums[i] 在区间 [1, n] 内。请你找出所有在 [1, n] 范围内但没有出现在 nums
2021-12-19:找到所有数组中消失的数字. 给你一个含 n 个整数的数组 nums ,其中 nums[i] 在区间 [1, n] 内.请你找出所有在 [1, n] 范围内但没有出现在 nums ...