CC2530串口通信
任何USART双向通信至少需要两个脚:接收数据输入(RX)和发送数据输出(TX)。
RX:接收数据串行输入。通过采样技术来区别数据和噪音,从而恢复数据。
TX :发送数据输出。当发送器被禁止时,输出引脚恢复到它的I/O端口配置。当发送器被激活,并且不发送数据时,TX引脚处于高电平。在单线和智能卡模式里,此I/O 口被同时用于数据的发送和接收。
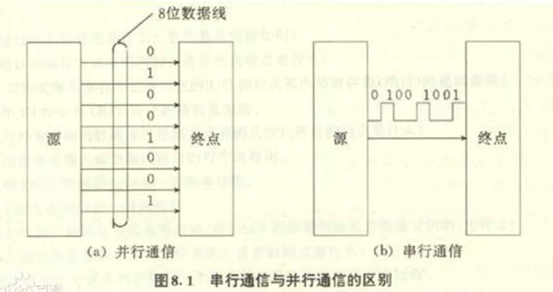
并行通信与串行通信
微控制器与外设之间的数据通信,根据连线结构和传送方式的不同,可以分为两种:并行通信和串行通信。
并行通信:指数据的各位同时发送或接收,每个数据位使用单独的一条导线。传输速度快、效率高,但需要的数据线较多,成本高。
串行通信:指数据一位接一位地顺序发送或接收。需要的数据线少,成本低,但传输速度慢,效率低。
CC2530的串口通信模块
CC2530有两个串行通信接口USART0和USART1,它们能够分别运行于异步UART模式或者同步SPI模式。
两个USART接口具有相同的功能,通过PERCFG寄存器可以设置两个USART接口对应外部I/O引脚的映射关系:
位置1:RX0 --- P0_2 TX0 --- P0_3 RX1 --- P0_5 TX1 --- P0_4
位置2:RX0 --- P1_4 TX0 --- P1_5 RX1 --- P1_7 TX1 --- P1_6
PERCFG寄存器:

UART口与计算机的COM口连接
认识两种电平:TTL电平和RS232电平。
TTL电平: 逻辑0----小于0.8V 逻辑1----大于2.4V。
RS232电平: 逻辑0----5~15V 逻辑1---- -5~-15V。
计算机的串行通信接口是RS-232的标准接口,而CC2530单片机的UART接口则是TTL电平,两者的电气规范不一致,所以要完成两者之间的数据通信,就需要借助接口芯片在两者之间进行电平转换,常用的有MAX232芯片。

TIP:DB9接口中,公头和母头的排列顺序是不同的。
需要用到的寄存器:
端口相关的配置
PERCFG:设置两个USART接口对应外部I/O引脚的映射关系:
P0SEL: 设置成外设功能(1为外设)

波特率相关的配置
CC2530的波特率由BAUD_E和BAUD_M共同决定:

给出了32MHz系统时钟下各常用波特率的参数值,由计算公式亦不难得出16MHz系统时钟下对应的参数值。
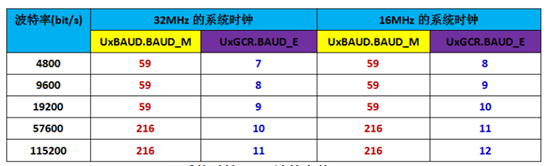
U0BAUD = 59; //32MHz的系统时钟产生9600BPS的波特率
U0GCR = 8; //16MHz---9; 32MHz---8

串口属性相关的配置:
U0UCR:USART 0 UART控制
U0SCR:USART 0 控制与状态


串口中断相关的配置
UTX0IF = 0; //清除TX发送中断标志
URX0IF = 0; //清除RX接收中断标志
URX0IE = 1; //使能URAT0的接收中断
EA = 1; //使能总中断
题目:上位机通过串口控制LED灯的开关
CC2530的串口0与上位机连接,在16HMz的内部系统时钟下产生9600BPS的波特率,禁止流控,无奇偶校验,采用8位数据,1位停止位,LSB先发送。上位机发送一一个字节控制目标板上的LED5和LED6的开关,具体要求如下:
(1)0xA1--LED5点亮;返回字符串“The LED5 is Open!" (LED6用0xB1)
(2)0xA2--LED5熄灭;返回字符串“The LED5 is Closed!" (LED6用0xB2)
(3) 串口0数据的接收数据采用中断方式,发送数据采用查询方式。
思路:
【1】计算波特率
【2】串口0的初始化函数
选择外设的引脚映射位置,并将对应的引脚设置为外设功能 ,然后对波特率、控制寄存器和中断的相关控制位进行设置。
【3】数据接收中断服务函数
USART0发送完成的中断向量是:0x3B ,也可以使用宏定义:URX0_VEXTOR 。在该中断服务函数中,要手工清除接收中断标志位URX0IF。
当数据接收完毕后,通过将一个自定义的变量Flag设置为1,告诉主函数,已经成 功接收到所需要的数据,主函数可以对其进行解析和执行指令。
【4】发送字节及发送字符串函数
当USART 的发送/接收数据缓冲寄存器UxDBUF被写入数据时,该字节就会发送到TXD引脚,开始数据的传输。由于UxDBUF是双缓冲的,所以在发送开始后会立即触发TX完成中断标志UTX0IF,并且数据缓冲器被卸载,也就是说,当字节正在发送时,新 的字节能够装入数据缓冲器UxDBUF。
在单字节的发送函数中,把要发送的数据写入UxDBUF后,查询TX完成标志UTX0IF,当该标志被置1时,表示数据发送完成,然后清除该标志。
代码:
#include "ioCC2530.h"
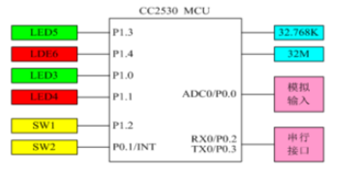
#define LED5 P1_3
#define LED6 P1_4
unsigned char dataRecv;
unsigned char Flag = ;
/*===================UR0初始化函数====================*/
void Init_Uart0()
{
PERCFG = 0x00; //串口0的引脚映射到位置1,即P0_2和P0_3 0100 0000 0位默认1的位置
P0SEL = 0x0C; //将P0_2和P0_3端口设置成外设功能 0000 1100 1为外设功能
U0BAUD = ; //16MHz的系统时钟产生9600BPS的波特率
U0GCR = ;
U0UCR |= 0x80; //禁止流控,8位数据,清除缓冲器
U0CSR |= 0xC0; //选择UART模式,使能接收器
UTX0IF = ; //清除TX发送中断标志
URX0IF = ; //清除RX接收中断标志
URX0IE = ; //使能URAT0的接收中断
EA = ; //使能总中断
}
/*================UR0接收中断服务函数================*/
#pragma vector = URX0_VECTOR
__interrupt void UR0_RecvInt()
{
URX0IF = ; //清除RX接收中断标志
dataRecv = U0DBUF; //将数据从接收缓冲区读出
Flag = ; //设置接收指令标志
}
/*=================UR0发送单字节函数=================*/
void UR0SendByte(unsigned char dat)
{
U0DBUF = dat; //将要发送的1字节数据写入U0DBUF
while(!UTX0IF); //等待TX中断标志,即数据发送完成
UTX0IF = ; //清除TX中断标志,准备下一次发送
}
/*=================UR0发送字符串函数===============*/
void UR0SendString(unsigned char *str)
{
while(*str != '\0') //发送一个字符串
{
UR0SendByte(*str++); //逐个发送字符串中的字节
}
}
/*================执行上位机的指令=================*/
void ExecuteTheOrder()
{
Flag = ; //清除接收指令标志
switch(dataRecv)
{
case 0xa1:
LED5 = ;
UR0SendString("The LED5 is Open!\r\n");
break;
case 0xa2:
LED5 = ;
UR0SendString("The LED5 is Closed!\r\n");
break;
case 0xb1:
LED6 = ;
UR0SendString("The LED6 is Open!\r\n");
break;
case 0xb2:
LED6 = ;
UR0SendString("The LED6 is Closed!\r\n");
break;
}
}
/*=================端口初始化函数====================*/
void Init_Port()
{
P1SEL &= ~0x18; //将P1_3和P1_4设置为通用I/O端口功能
P1DIR |= 0x18; //将P1_3和P1_4的端口设置为输出
LED5 = ; //关闭LED5灯
LED6 = ; //关闭LED6灯
}
/*===================主函数=========================*/
void main()
{
Init_Port(); //初始化端口
Init_Uart0(); //初始化串口0
//先发送一个字符串,测试串口0数据传输是否正确
UR0SendString("I am OK!\r\n");
while()
{
if(Flag == ) //查询是否收到上位机指令
{
ExecuteTheOrder(); //解析并执行指令
}
}
}
CC2530串口通信的更多相关文章
- cc2530串口通信流程
//串口发送接收流程 main: //主函数 ->osal_init_system(); //操作系统初始化 ->osalInitTasks(); //任务初始化 -->ZDApp_ ...
- ZStack串口通信
要使用ZStack就不得不先了解ZStack的OSAL工作原理 http://blog.csdn.net/qinpeng_zbdx/article/details/20990797 http://we ...
- .NET 串口通信
这段时间做了一个和硬件设备通信的小项目,涉及到扫描头.输送线.称重机.贴标机等硬件.和各设备之间通信使用的是串口或网络(Socket)的方式.扫描头和贴标机使用的网络通信,输送线和称重机使用的是串口通 ...
- BluetoothChat用于蓝牙串口通信的修改方法
本人最近在研究嵌入式的串口通信,任务是要写一个手机端的遥控器用来遥控双轮平衡小车.界面只用了一个小时就写好了,重要的问题是如何与板子所带的SPP-CA蓝牙模块进行通信. SPP-CA模块自带代码,在这 ...
- Win10 IoT C#开发 4 - UART 串口通信
Windows 10 IoT Core 是微软针对物联网市场的一个重要产品,既可以开发设备UI与用户交互式操作,又可以控制GPIO等接口,使得原来嵌入式繁琐的开发变得简单.通过Remote Debug ...
- 使用Java实现简单串口通信
最近一门课要求编写一个上位机串口通信工具,我基于Java编写了一个带有图形界面的简单串口通信工具,下面详述一下过程,供大家参考 ^_^ 一: 首先,你需要下载一个额外的支持Java串口通信操作的jar ...
- Java 串口通信
在Windows系统下,用Java开发串口通信相关的程序时,需要用到几个文件. (1)win32com.dll 要放在jdk\jre\bin目录下. (2)comm.jar 和javax.comm.p ...
- .NET 串口通信中断接收,包含0X1A(作为EOF)
.NET串口通信中将`0X1A`当做EOF处理,.NET接收到EOF会触发一次接收中断,此时事件形参`SerialDataReceivedEventArgs`值为枚举 `Eof`,其他为`Chars` ...
- STC12C5A60S2 双串口通信
STC12C5A60S2单片机是一款功能比较强大的单片机,它拥有两个全双工串行通信接口,串口1的功能及操作与传统51单片机串行口相同:特殊的是STC12C5A60S2单片机内部有一个独立波特率发生器, ...
随机推荐
- Opencv for android 模板匹配
因为有这方面的需要所以,对模板查找搜寻了相关资料,只是对于算法的东西很难看得动,特别是opencv涉及的很多的数学方法. 所以只为了实现这个功能,因为需求比较简单,在网上也搜寻到了相关代码,就直接拿来 ...
- 小程序—银行、券商们下一代APP的进阶方向
传统金融机构们的App——尤其以手机银行.手机证券为最,发展到今天,已经产生一系列的问题:从用户角度看,体验普遍不好.高度同质化:从业务运营角度看,几乎没有什么“运营”的抓手:从IT角度看,投入产出比 ...
- 遇到自己喜欢的视频无法下载,python帮你解决
问题描述 python是一种非常好用的爬虫工具.对于大多数的爬虫小白来说,python是更加简洁,高效的代码.今天就用实际案例讲解如何爬取动态的网站视频. 环境配置:python3:爬虫库reques ...
- Eugene and an array CodeForces - 1333C (思维)
题目大意:求好数组的个数,所谓好数组 1好数组是原数组的一段连续的子数组,2 好数组不包含元素和为0的子数组. 题解:唉,这个题目把我给些懵了....我一开始的想法求后缀和,保存位置,然后枚举前缀和, ...
- 成员指针与mem_fn
本文是<functional>系列的第4篇. 成员指针是一个非常具有C++特色的功能.更低级的语言(如C)没有类,也就没有成员的概念:更高级的语言(如Java)没有指针,即使有也不会有成员 ...
- C++调用TensorFlow
在使用C++调用TensorFlow接口时出现的问题,网上没有资料,问了老师才知道的. Exception ignored in: <module 'threading' from 'E:\\t ...
- Android App安全渗透测试(一)
一. 实验环境搭建 1. 安装JDK 2. 安装Android Studio 3. 模拟器或真机 我的是夜神模拟器和nexus 工具 Apktool ...
- Spiking-YOLO : 前沿性研究,脉冲神经网络在目标检测的首次尝试 | AAAI 2020
论文提出Spiking-YOLO,是脉冲神经网络在目标检测领域的首次成功尝试,实现了与卷积神经网络相当的性能,而能源消耗极低.论文内容新颖,比较前沿,推荐给大家阅读 来源:晓飞的算法工程笔记 公众 ...
- windows下部署.netcore+docker系列三 (unbuntu 18.4 下安装ftp)
// 先更新下系统sudo apt-get update//安装ftpsudo apt-get install vsftpd// 启动 服务sudo service vsftpd start//ftp ...
- tp5--路由的使用方法(深入)
懒得写注释,直接上代码 配置文件Route: <?php use think\Route; //tp5路由测试 //动态注册 //Route::rule('路由表达式','路由地址','请求类型 ...