利用 Intel Realsense做SLAM开发(一)
最近手里拿到一台Realsense D435,就是这个:
https://click.intel.com/intelr-realsensetm-depth-camera-d435.html
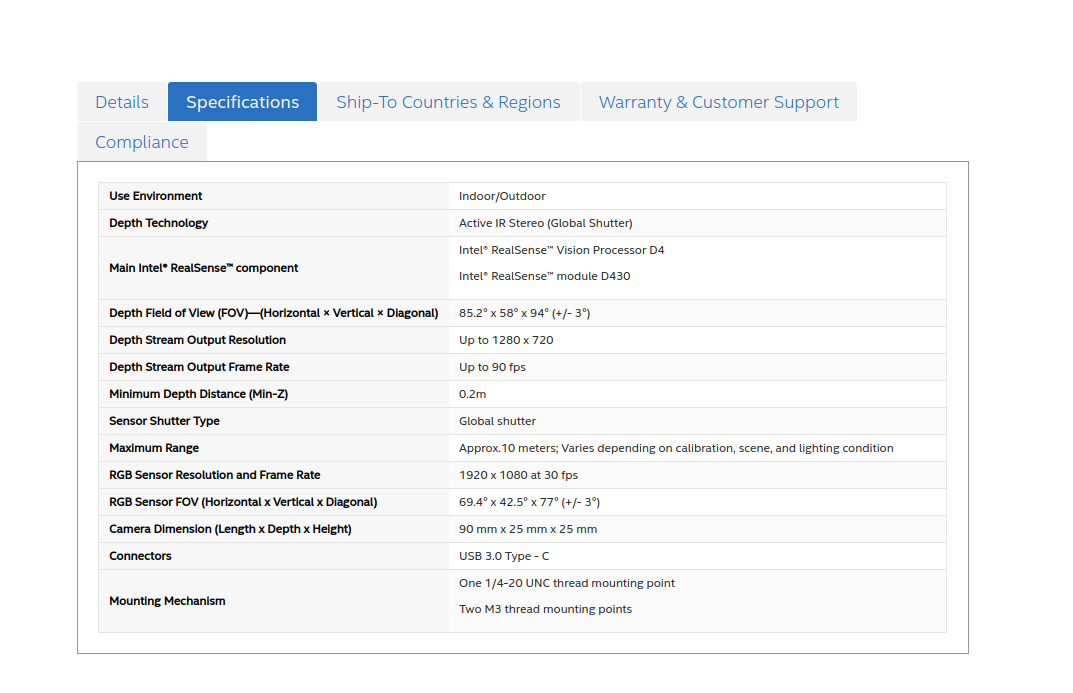
所以准备拿来做SLAM研究和开发,先上手试一试吧。先简单看一下参数,基于Active IR测深度,支持USB3.0接口:
拿到首先把配套的开发环境配好,然后跑一下demo。
软件可从官网地址下载:https://realsense.intel.com/sdk-2/
我的开发环境是Ubuntu 16.04.
安装按照:https://github.com/IntelRealSense/librealsense/blob/master/doc/distribution_linux.md
没有任何问题。
当然也可以源码编译安装:https://github.com/IntelRealSense/librealsense/blob/master/doc/installation.md
安装完成后可打开realsense-viewer,再连上D435,先把demo跑起来。这时候就出问题了,显示的是
No Frames Received!
Google之后发现不少人提了这个问题,一开始怀疑是USB接口的原因,确实,一开始接了USB2.0,之后换成USB3.0,依然不行………开始怀疑是不是该换个电脑了。
不过github上还有一种可行的解决方法,更新固件,于是抱着试一试的态度,参考:
https://www.intel.com/content/dam/support/us/en/documents/emerging-technologies/intel-realsense-technology/Linux-RealSense-D400-DFU-Guide.pdf
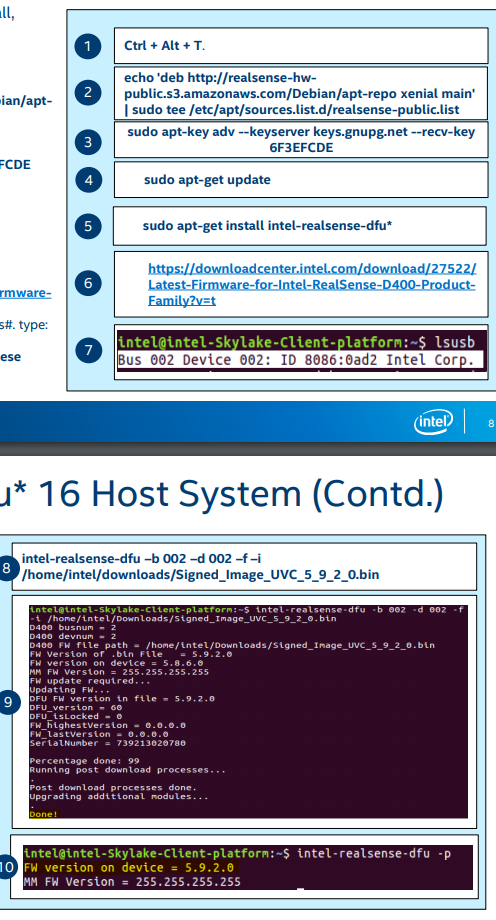
. 打开终端. 添加网址:
i. echo 'deb http://realsense-hw-public.s3.amazonaws.com/Debian/aptrepo
xenial main' | sudo tee /etc/apt/sources.list.d/realsensepublic.list
[Enter]
. 添加公钥:
i. sudo apt-key adv --keyserver keys.gnupg.net --recv-key 6F3EFCDE
[Enter]
. 更新软件源:
i. sudo apt-get update [Enter]
. 下载dfu:
i. sudo apt-get install intel-realsense-dfu* [Enter]
. 下载最新固件更新包:
i. 网址是:
https://downloadcenter.intel.com/download/27522/Latest-Firmwarefor-Intel-RealSense-D400-Product-Family?v=t
. 把你的D435插到USB3.1口(我的USB3.0也行). Check serial # and bus#. (以下步骤都是插入D435后完成的)
i. 运行lsusb [Enter]
ii. 注意“Intel Corp.” bus and device numbers; DFU tool uses these
values to identify Intel® RealSense™ D400 series camera.
Installation Steps (Contd.)
. Upgrade D400 Series Camera Firmware with Linux DFU
Tool:
i. 输入命令:这里-b和-d后面要改成你自己的bus和device编号,最后是你下载好的固件的bin文件
(This command specifies bus #, device #, -f flag to force
upgrade, and –i flag for complete system path to
downloaded FW.bin file.)
intel-realsense-dfu –b –d –f –i
/home/intel/downloads/Signed_Image_UVC_5_9_2_0.b
in [Enter]
. 这个时候更新就开始了,大概界面就是如下图的步骤9,等待完成.
. 最后检查固件版本:
i. Check firmware with command:
intel-realsense-dfu –p [Enter]
下面的图片就是ppt里的10个步骤
更新完固件之后,就可以啦!我最新的版本号是5.10
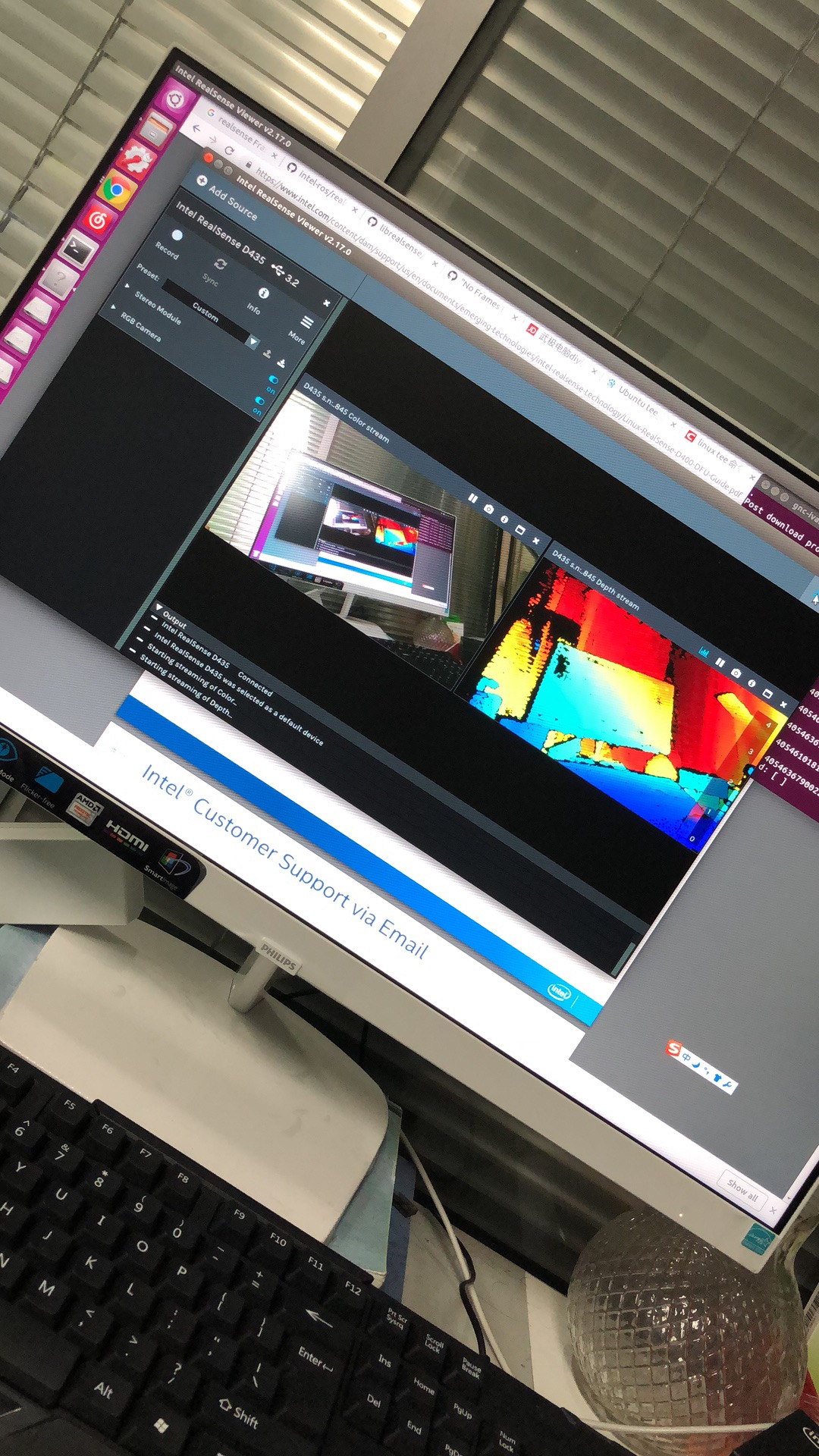
下面就可以用它跑跑其他程序试试
利用 Intel Realsense做SLAM开发(一)的更多相关文章
- 【转】Intel RealSense(实感技术)概览
Intel RealSense(实感技术)概览 1 Reply 版权声明:本文系本站作者自己翻译整理,欢迎转载,但转载请以超链接形式注明文章来源(planckscale.info).作者信息和本声明, ...
- 看京东如何把Intel RealSense技术用在物流上
提起Intel RealSense 3D 深度摄像头,总是离不开无人机.机器人等前沿硬件产品,比如 CES 2016 上让人眼前一亮的自动避障无人机Yuneec “台风 H”,Segway.Nineb ...
- Realsense Camera SDK 开发手记(一)
0x01 第一次使用SDK写代码,有很多不懂的地方,在设备来之前把文档看了一下,大概明白了点,东平西凑大概写了点,但是当把设备连接上去进行测试的时候就出现了各种问题,用RealSenseCamera进 ...
- 【转】Java做服务器开发语言
版权声明:本文为博主原创文章,未经博主允许不得转载. 随着游戏市场的兴起,特别是网页游戏.手机游戏的崛起,对游戏开发技术的需求越来越多.网络游戏开发是一个庞大的体系,总体来说是客户端与服务器端.客户端 ...
- 如何用Python做Web开发?——Django环境配置
用Python做Web开发,Django框架是个非常好的起点.如何从零开始,配置好Django开发环境呢?本文带你一步步无痛上手. 概念 最近有个词儿很流行,叫做“全栈”(full stack ...
- Visual Studio C# 利用git和github协同开发时产生冲突的解决办
Visual Studio C# 利用git和Github协同开发时产生冲突的解决办法 前言:在前两天的助教作业中,发现了自己没有办法解决在用vs开发C#的窗体项目的过程中产生的冲突问题,在查阅了资料 ...
- Windows 平台做 Python 开发的最佳组合
在 Windows 上怎样做 Python 开发?是像大神那样使用纯文本编辑器,还是用更加完善的 IDE?到底是用自带的命令行工具,还是需要装新的 Terminal?本文将带你了解如何利用微软官方维护 ...
- 大学同学做Java开发比我多5K,八年老Android只会crud该转Java吗?
最近在网上看到这样一个帖子: 做了八年Android开发,感觉这块做着也挺没意思,日常工作就是做一些架构优化,质量数据监控,改一改构建脚本,最主要的是业务负责人没有一个是做客户端的,都是后端的人. 最 ...
- git 操作 :从远程仓库gitLab上拉取指定分支到本地仓库;git如何利用分支进行多人开发 ;多人合作代码提交实践
例如:将gitLab 上的dev分支拉取到本地 git checkout -b dev origin/dev 在本地创建分支dev并切换到该分支 git pull origin dev 就可以把git ...
随机推荐
- Java 读取properties
package Db; import java.io.InputStream; import java.util.Properties; import java.io.BufferedReader; ...
- 学习一份百度的JavaScript编码规范
JavaScript编码规范 1 前言 2 代码风格 2.1 文件 2.2 结构 2.2.1 缩进 2.2.2 空格 2.2.3 换行 2.2.4 语句 2.3 命名 2.4 注释 2.4.1 单行注 ...
- 解密蓝牙mesh系列
解密蓝牙mesh系列 https://mp.weixin.qq.com/s/KdVhkgcmHIboA0xPFqFCgQ 1.NRF52832 & NRF52840 BLE mesh 协议栈 ...
- SimpleDateFormat 的 format 方法使用具体解释
Java中怎么才干把日期转换成想要的格式呢.或把字符串转换成一定格式的日期,如把数据库中的日期或时间转换成自己想要的格式,JAVA中提供了SimpleDateFormat类能够实现,下面是Simple ...
- iOS之利用腾讯Bugly程序调试,测试代码bug、卡顿等情况
1.自己先写一个 Demo 演示一下利用bugly测试崩溃的具体情况. 在ViewController里面实现崩溃代码如下: 运行后 毫无疑问程序报错了! 2.使用到第三方的框架Bugly,官方下载 ...
- ORM一对多查询
现有两张表,一张书籍表(Book),一张作者表(Author) 现在想查询出书本信息和书本的作者 book=Book.objects.get(name="python") book ...
- js基础(闭包)
1. "闭包就是跨作用域访问变量." [示例一] var name = 'wangxi' function user () { // var name = 'wangxi' fun ...
- 浅谈JS异步轮询和单线程机制
单线程特点执行异步操作 js是单线程语言,浏览器只分配给js一个主线程,用来执行任务(函数),但一次只能执行一个任务,这些任务就会排队形成一个任务队列排队等候执行.一般而已,相对耗时的操作是要通过异步 ...
- -L -Wl,-rpath-link -Wl,-rpath区别精讲
目录 前言 源码准备 源码内容 尝试编译,保证源码没有问题 编译 首先编译world.c 编译并链接hello.c 调试编译test.c 结论 转载请注明出处,谢谢 https://www.cnblo ...
- Nginx与Tomcat实现请求动态数据与请求静态资源的分离
上篇博客说明了Nginx在应用架构中的作用,以及负载均衡的思路.这篇实践一下其中的访问静态资源与访问动态资源的操作. 一.认识访问静态资源与访问动态资源的区别 静态资源:指存储在硬盘内的数据,固定的数 ...