C语言下的Led灯
1. 设计思想
1.1 设置处理器模式
设置sp啥的汇编要先进入SVC模式,超级管理员特权模式,这样就可以访问所有寄存器了,需要用到cpsr寄存器
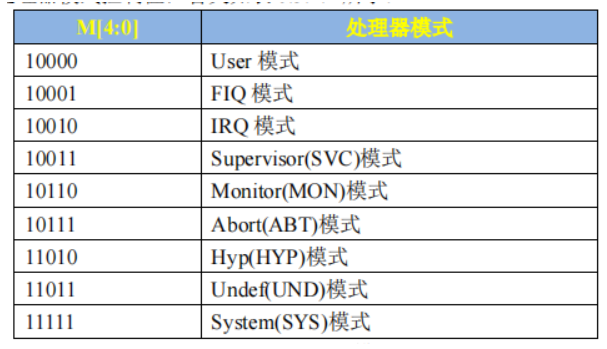
0到4位要设置svc模式10011 = 0x13, 就不能用ldr和str了因为不能操作这两个寄存器
1.2 设置sp指针
进入C语言之前要设置出栈和入栈。sp可以指向内部ram,也可以指向ddr。在6u启动的时候上一章讲的,其实ddr已经被初始化了,sp设置到哪里呢?要设置堆栈大小,0x200000 = 2M(随便设置)。
处理器栈增长方式:
对于A7而言是向下增长的,就是从高地址向低地址增长,512M DDR的地址是0x80000000-0x9FFFFFFF, 如果设置成8000000了就相当于0了!那样的话sp就是0x80200000
1.3 跳转到C语言
用b来跳转main函数
2.代码
start.s
.global _start
_start:
/* 操作cpsr寄存器使其进入到超级管理员模式 */
mrs r0, cpsr
bic r0, r0, #0x1f @位消除,将后面5位设置为0
orr r0, r0, #0x13 @按位或,上面5位设置位0之后就可以赋值进入svc啦
@ mov r0 #0x13 这种赋值语句,看起来还可以,但是前面27位都为0啦,我们只关心后面5位
msr cpsr, r0
/* 设置栈指针 */
ldr sp,=0x80200000
/* 跳转C */
b main
main.h
#ifndef __MAIN_C
#define __MAIN_C
/*
* CCM 相关寄存器地址
*/
#define CCM_CCGR0 *((volatile unsigned int *)0X020C4068)
#define CCM_CCGR1 *((volatile unsigned int *)0X020C406C)
#define CCM_CCGR2 *((volatile unsigned int *)0X020C4070)
#define CCM_CCGR3 *((volatile unsigned int *)0X020C4074)
#define CCM_CCGR4 *((volatile unsigned int *)0X020C4078)
#define CCM_CCGR5 *((volatile unsigned int *)0X020C407C)
#define CCM_CCGR6 *((volatile unsigned int *)0X020C4080)
/*
* IOMUX 相关寄存器地址
*/
#define SW_MUX_GPIO1_IO03 *((volatile unsigned int *)0X020E0068)
#define SW_PAD_GPIO1_IO03 *((volatile unsigned int *)0X020E02F4)
/*
* GPIO1 相关寄存器地址
*/
#define GPIO1_DR *((volatile unsigned int *)0X0209C000)
#define GPIO1_GDIR *((volatile unsigned int *)0X0209C004)
#define GPIO1_PSR *((volatile unsigned int *)0X0209C008)
#define GPIO1_ICR1 *((volatile unsigned int *)0X0209C00C)
#define GPIO1_ICR2 *((volatile unsigned int *)0X0209C010)
#define GPIO1_IMR *((volatile unsigned int *)0X0209C014)
#define GPIO1_ISR *((volatile unsigned int *)0X0209C018)
#define GPIO1_EDGE_SEL *((volatile unsigned int *)0X0209C01C)
#endif // !__MAIN_C
main.c
#include "main.h"
void clock_enable()
{
CCM_CCGR0 = 0xFFFFFFFF;
CCM_CCGR1 = 0xFFFFFFFF;
CCM_CCGR2 = 0xFFFFFFFF;
CCM_CCGR3 = 0xFFFFFFFF;
CCM_CCGR4 = 0xFFFFFFFF;
CCM_CCGR5 = 0xFFFFFFFF;
CCM_CCGR6 = 0xFFFFFFFF;
}
void led_init()
{
SW_MUX_GPIO1_IO03 = 0x5;
SW_PAD_GPIO1_IO03 = 0x10b0;
GPIO1_GDIR = 0x8;
GPIO1_DR = 0xfffffff7;
}
/*
* 将 GPIO1_DR 的 bit3 清零
*/
void led_on(void)
{
GPIO1_DR &= ~(1<<3);
}
/*
* @description : 关闭 LED 灯
* @param : 无
* @return : 无
*/
void led_off(void)
{
/*
* 将 GPIO1_DR 的 bit3 置 1
*/
GPIO1_DR |= (1<<3);
}
void delay_short(volatile unsigned int n)
{
while(n--);
}
void delay(volatile unsigned int n)
{
while (n--)
{
/* code */
delay_short(0x7ff);
}
}
void main()
{
clock_enable();
led_init();
while (1)
{
/* code */
led_on();
delay(500);
led_off();
delay(500);
}
}
Makefile
objs := start.o main.o # 文件定义
# $^表示所有依赖文件的集合
# $@表示所有生成目标文件
ledc.bin : $(objs)
arm-linux-gnueabihf-ld -Ttext 0x87800000 -o ledc.elf $^
arm-linux-gnueabihf-objcopy -O binary -S ledc.elf $@
arm-linux-gnueabihf-objdump -D -m arm ledc.elf > ledc.dis
# $< 表示依赖文件的第一个目标,为啥不用$^?
# 因为比如是main.o main.c,usart.c,main对应的第一个文件没错
# $^是所有的该出错啦
%.o : %.c
arm-linux-gnueabihf-gcc -Wall -nostdlib -c -o $@ $<
%.o : %.S
arm-linux-gnueabihf-gcc -Wall -nostdlib -c -o $@ $<
%.o : %.s
arm-linux-gnueabihf-gcc -Wall -nostdlib -c -o $@ $<
clean:
rm -rf *.o *.elf *.dis *.bin
链接脚本
SECTIONS
{
. = 0X87800000;
.text :
{
start.o
*(.text)
}
.rodata ALIGN(4) : {*(.rodata*)}
.data ALIGN(4) : { *(.data) }
__bss_start = .;
.bss ALIGN(4) : { *(.bss) *(COMMON) }
__bss_end = .;
}
- 其中.是一个定位计时器,默认是0,如果赋值了,就说明程序在这地方定位了。所以是87800000
- text段,调用C函数之前肯定要先汇编,所以先汇编,然后所有文件的text段都放在text段中
- 同理rodata(只读)和data段都放在相应的段里,4字节对齐。但是假如我想把它们放在别的地方 ,需要再用 .= 指定一段内存
- bss段,没有初始化的变量,初始化为0保存在bss段内,没有初始化的在COMMON
- bss_start和end直接赋值为0,就是没有被初始化的,手动清0,直接把内存赋值为0
C语言下的Led灯的更多相关文章
- 让USB键盘的LED灯听你的!(不干扰使用)
最近在研究一个课题,如何能利用键盘的led灯通道进行有效通信,那么首先要做的就是尝试能否在不影响键盘的情况下控制LED灯(num lock ,caps lock ,scroll lock)的使用. 首 ...
- C语言版——点亮LED灯,深入到栈
在上一篇进行了汇编语言的编写之后,我们采用C语言来编写程序,毕竟C语言才是我们使用最多的语言. 仅仅是点亮LED灯显然太过于简单,我们需要分析最后的反汇编,了解函数调用栈,深入C语言骨髓去分析代码,并 ...
- Linux下实现流水灯等功能的LED驱动代码及测试实例
驱动代码: #include <linux/errno.h> #include <linux/kernel.h> #include <linux/module.h> ...
- STM32 用c语言控制4个LED灯从左向右无限流动
在用c语言写LED流水灯的前提条件是配置好其他环境,这里我就不说环境了, 想让LED灯无限循环时,首先要想到的是无限循环函数,我这里利用的是for函数 无限循环. #include "stm ...
- 嵌入式Linux学习入门:控制LED灯
记录自己linux学习过程,让自己能够一直坚持下去 1.原理图分析: nLED_1, nLED_2, nLED_4, 给低电平则对应LED灯亮,高电平则对应LED灯灭, S3C2440芯片GPF4-G ...
- Beaglebone Black–GPIO 高低电平控制 LED 灯
上一篇,运用 Linux 的 sysfs,控制本机上的 LED 灯,usr0 至 usr3,这次用 GPIO 控制外部的电路,点亮 LED 灯. 这次的全部材料: BBB 一台 购买 BBB 自带的 ...
- Tiny4412之蜂鸣器驱动与led灯驱动
一:LED驱动编写 要编写LED驱动,首先的知道开发板的构造:开发板分为核心板与底板:编写驱动的第一步就是要看开发板,找到LED灯在开发板上的位置及所对应的名字:第一步就要查看核心板电路图,以及底板电 ...
- 51单片机学习笔记(郭天祥版)(1)——单片机基础和点亮LED灯
关于单片机型号的介绍: STC89C52RC40C-PDIP 0721CV4336..... STC:STC公司 89:89系列 C:COMS 52(还有51,54,55,58,516,):2表示存储 ...
- 第7章 使用寄存器点亮LED灯
第7章 使用寄存器点亮LED灯 全套200集视频教程和1000页PDF教程请到秉火论坛下载:www.firebbs.cn 野火视频教程优酷观看网址:http://i.youku.com/fir ...
随机推荐
- pytest执行时mian函数传参
在代码中执行pytest可以通过main函数 加参数来指定运行规则时,参数需要放在列表或者元祖中 # pytest.main(["--html=report.html"]) # p ...
- C11 (GNU Dialect) -std=gnu11 和 -std=c11
C11 (GNU Dialect) -std=gnu11 和 -std=c11 C11 (GNU Dialect) -std=gnu11 和 -std=c11 用于 IntelliSense 的 C ...
- 按键检测GPIO输入
1. 项目 通过按键控制开关LED灯,按下按键灯亮,再按一下灯灭. 2. 代码 mian.c #include "stm32f10x.h" //相当于51单片机中的 #includ ...
- python jinja2初见
吸取了长城杯的教训,学习python-web迫在眉睫. 正常难度的python_template_injection,由于现在没学面向对象,理解原理比较困难,所以先使用简单版复现:并附上正常版的常用p ...
- 正则表达式: NFA引擎匹配原理
NFA引擎匹配原理 1 为什么要了解引擎匹配原理 一个个音符杂乱无章的组合在一起,弹奏出的或许就是噪音,同样的音符经过作曲家的手,就可以谱出非常动听的乐曲,一个演奏者同样可以照着乐谱奏出动 ...
- filebeat收集日志到elsticsearch中并使用ingest node的pipeline处理
filebeat收集日志到elsticsearch中 一.需求 二.实现 1.filebeat.yml 配置文件的编写 2.创建自定义的索引模板 3.加密连接到es用户的密码 1.创建keystore ...
- 链表分割 牛客网 程序员面试金典 C++ Python
链表分割 牛客网 程序员面试金典 C++ Python 题目描述 编写代码,以给定值x为基准将链表分割成两部分,所有小于x的结点排在大于或等于x的结点之前 给定一个链表的头指针 ListNode* p ...
- DeWeb 与 Unigui的区别
DeWeb 与 Unigui 相同: 都是采用Delphi开发网页的平台 不同: 1 DeWeb不需要安装控件, 而Unigui需要安装自己的控件 2 DeWeb无需要学习HTML/CSS/JavaS ...
- git与pycharm的使用详解(git+gitlab+pycham)
前言 当自动化框架搭建出来后,需要多个人来使用框架,写自动化用例. 在这个阶段,我们不可能将写好的代码打包发给其他人,这样很麻烦,多人协作一点也不灵活. 这时候,就提现出了git的价值 一.下载安装 ...
- 三层组网AP上线外接DHCP
一.实验目的 在3-1的基础上增加DHCP的配置方法 二.实验仪器设备及软件 仪器设备:一台AC,四台AP,一台路由充当DHCP服务器 软件:ENSP 三.实验原理 四. 实验内容与步骤 1.三层 ...