SIFT算法大综合
SIFT算法原理+参看资料+问题issue
参考书籍——《图像局部不变性特征与描述》王永明、王贵锦著
SIFT特征点提取——详见博客:https://blog.csdn.net/lingyunxianhe/article/details/79063547
SIFT算法总结:用于图像搜索——详见博客:https://www.cnblogs.com/wishchin/p/9200312.html
问题描述及解决
1.什么叫“为了满足尺度变化的连续性”S=3?
理解:假设s=3,也就是每个塔里有3层,则k=21/s=21/3,那么按照上图可得Gauss Space和DoG space 分别有3个(s个)和2个(s-1个)分量,在DoG space中,1st-octave两项分别是σ,kσ; 2nd-octave两项分别是2σ,2kσ;由于无法比较极值,我们必须在高斯空间继续添加高斯模糊项,使得形成σ,kσ,k2σ,k3σ,k4σ这样就可以选择DoG space中的中间三项kσ,k2σ,k3σ(只有左右都有才能有极值),那么下一octave中(由上一层降采样获得)所得三项即为2kσ,2k2σ,2k3σ,其首项2kσ=24/3。刚好与上一octave末项k3σ=23/3尺度变化连续起来,所以每次要在Gaussian space添加3项,每组(塔)共S+3层图像,相应的DoG金字塔有S+2层图像。
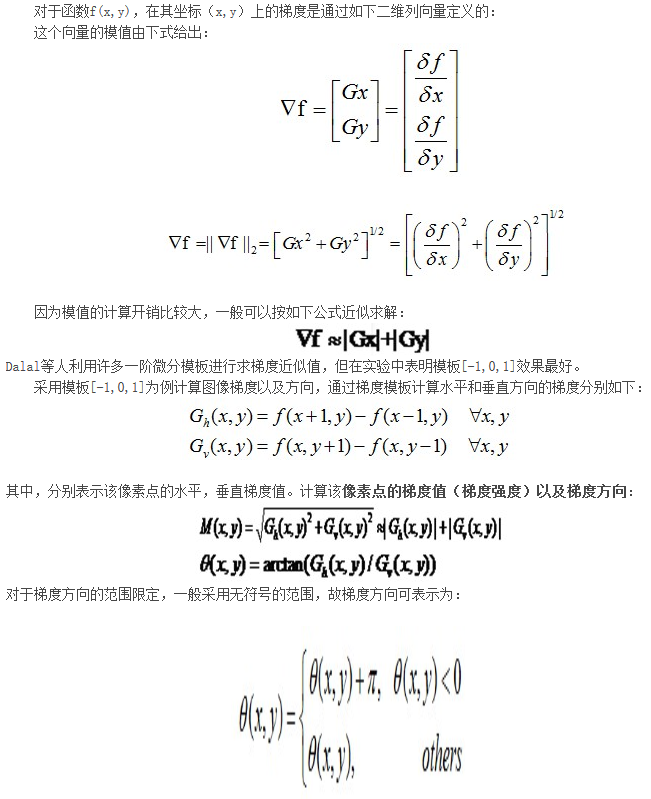
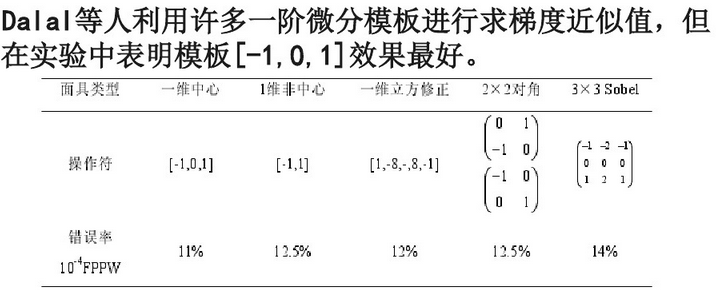
2. 梯度问题
问题描述:梯度的计算为什么用(x+1,y)(x-1,y)(x,y+1)(x,y-1)四个坐标?
理解:
3.问题描述:P130页描述-求主方向的梯度直方图中梯度方向的范围是0到360度,直方图每10度一个柱共36个柱,而P131梯度直方图中只有8个柱,而P133梯度直方图有7个柱?
理解:计算得到梯度方向后,就要使用直方图统计特征点邻域内像素对应的梯度方向和幅值。梯度方向的直方图的横轴是梯度方向的角度(梯度方向的范围是0到360度,直方图每36度一个柱共10个柱,或者没45度一个柱共8个柱),纵轴是梯度方向对应梯度幅值的累加,在直方图的峰值就是特征点的主方向。在Lowe的论文还提到了使用高斯函数对直方图进行平滑以增强特征点近的邻域点对关键点方向的作用,并减少突变的影响。为了得到更精确的方向,通常还可以对离散的梯度直方图进行插值拟合。具体而言,关键点的方向可以由和主峰值最近的三个柱值通过抛物线插值得到。在梯度直方图中,当存在一个相当于主峰值80%能量的柱值时,则可以将这个方向认为是该特征点辅助方向。所以,一个特征点可能检测到多个方向(也可以理解为,一个特征点可能产生多个坐标、尺度相同,但是方向不同的特征点)。Lowe在论文中指出15%的关键点具有多方向,而且这些点对匹配的稳定性很关键。
注意区别种子点(子区域)的梯度直方图哦!P134:与求主方向不同,此时每个种子区域的梯度直方图在0-360之间划分为8个方向区间,每个区间为45度,即每个种子点有8个方向的梯度强度信息。
在实际的计算过程中,为了增强匹配的稳健性,Lowe建议对每个关键点使用4×4共16个种子点来描述,这样一个关键点就可以产生128维的SIFT特征向量。
SIFT算法大综合的更多相关文章
- OpenCV计算机视觉学习(13)——图像特征点检测(Harris角点检测,sift算法)
如果需要处理的原图及代码,请移步小编的GitHub地址 传送门:请点击我 如果点击有误:https://github.com/LeBron-Jian/ComputerVisionPractice 前言 ...
- SIFT算法详解(转)
http://blog.csdn.net/zddblog/article/details/7521424 目录(?)[-] 尺度不变特征变换匹配算法详解 Scale Invariant Feature ...
- 【转】 SIFT算法详解
尺度不变特征变换匹配算法详解Scale Invariant Feature Transform(SIFT)Just For Fun zdd zddmail@gmail.com 对于初学者,从Davi ...
- SIFT算法的应用--目标识别之Bag-of-words模型
原文:http://blog.csdn.net/v_JULY_v/article/details/6555899 SIFT算法的应用 -目标识别之用Bag-of-words模型表示一幅图像 作者:wa ...
- 《sift算法详解》阅读笔记
原博客来自:http://blog.csdn.net/zddblog/article/details/7521424 定义: 尺度不变特征转化是一种计算机视觉算法,用于侦测和描述物体的局部性特征,在空 ...
- SIFT算法:特征描述子
SIFT算法:DoG尺度空间生产 SIFT算法:KeyPoint找寻.定位与优化 SIFT算法:确定特征点方向 SIFT算法:特征描述子 目录: 1.确定描述子采样区域 2.生成描述子 2.1 旋 ...
- SIFT算法:确定特征点方向
SIFT算法:DoG尺度空间生产 SIFT算法:KeyPoint找寻.定位与优化 SIFT算法:确定特征点方向 SIFT算法:特征描述子 目录: 1.计算邻域梯度方向和幅值 2.计算梯度方向直方图 ...
- SIFT算法:KeyPoint找寻、定位与优化
SIFT算法:DoG尺度空间生产 SIFT算法:KeyPoint找寻.定位与优化 SIFT算法:确定特征点方向 SIFT算法:特征描述子 目录: 1.找寻 2.定位 3.优化 1 KeyPoint ...
- SIFT算法:DoG尺度空间生产
SIFT算法:DoG尺度空间生产 SIFT算法:KeyPoint找寻.定位与优化 SIFT算法:确定特征点方向 SIFT算法:特征描述子 目录: 1.高斯尺度空间(GSS - Gauss Scal ...
随机推荐
- JetBrains 产品线破解方法
参考: 1.https://www.jianshu.com/p/f404994e2843 2.https://xclient.info/s/intellij-idea.html#versions 3. ...
- js中this的绑定规则及优先级
一. this绑定规则 函数调用位置决定了this的绑定对象,必须找到正确的调用位置判断需要应用下面四条规则中的哪一条. 1.1 默认绑定 看下面代码: function foo() { cons ...
- React-Native:解决真机调试时候Could not get BatchedBridge, make sure your bundle is packaged properly
问题一:用真机通过USB连接电脑调试的时候报如下错:Could not get BatchedBridge, make sure your bundle is packaged properly,如图 ...
- angualrjs添加ngTouch
angularjs没有touch时间需要添加directive 插件代码如下 "use strict"; angular.module("ngTouch", [ ...
- spring boot 2 统一异常处理
spring mvc 针对controller层异常统一处理非常简单,使用 @RestControllerAdvice 或 @RestControllerAdvice 注解就可以轻@RestContr ...
- Codeforces Round #436 B. Polycarp and Letters
题意:给你一串长度为n的字符,由大小写字母组成,求连续的小写子串中不同字母个数的最大值. Input 11aaaaBaabAbA Output 2 Input 12zACaAbbaazzC Outpu ...
- json,json对象以及js对象字面量的区别
从定义看: json:一种数据交换格式 json对象:js的一个内置对象,拥有JSON.stringify()和JSON.parse()两个方法 js对象字面量:封闭在花括号对({})中的一个对象的零 ...
- QUARTZ系列之二-监听器
Listener 1.是什么: perform actions based on events occurring within the scheduler. 2.分类:a.TriggerListen ...
- day49 定位布局和过渡动画
复习 1.盒子在父级水平居中 margin: 0 auto; 2.文本样式操作 color: red; text-align: center; font: 900 30px/200px "S ...
- PostgreSQL 锁等待诊断详解
摘要PostgreSQL和大多数传统RDBMS一样,都设计了大量的锁来保证并发操作的数据一致性. 同时PG在设计锁等待时,以队列方式存储等待锁. 参考 ProcSleep()@src/backend/ ...