airTest 使用体验
airTest是国内网易自研的一套基于图像识别进行UI自动化测试的框架,目前已经可以支持andriod,ios,web端的UI测试,在google开发者大会上得到了google的高度认可。
最近在学习使用这个框架,首先来了解下他的原理
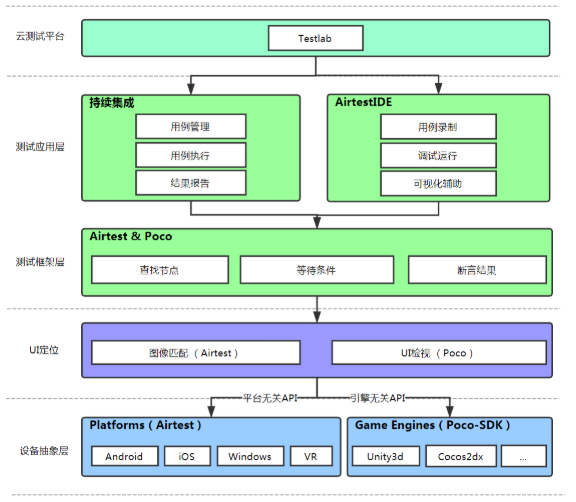
一、 airTest框架的构成
airTest ---这里指的是airTest核心源代码
airTestIDE ---集成的开发环境,可以快速开发airTest脚本 (注意它自带了python 3.X版本,不能直接使用本地的python库)
Poco ---UI 控件检索工具,支持各种客户端
二、 airTest是如何进行识别的?
众所周知,airTest的最大亮点就是通过图像识别进行UI自动化测试,那么airTest的图像识别是如何进行的呢?
1. 获取屏幕截图
2. 根据用户传递的图片与截图进行对比
传入的图像需要进行缩放变化,写用例时候的截图进行变换后转换成跑用例时候的截图,以提高匹配成功率
image = self._resize_image(image, screen, ST.RESIZE_METHOD)
3. 图像匹配,这里用的是openCV的模版匹配和特征匹配
3.1.模板匹配 cv2.mathTemplate
def find_template(im_source, im_search, threshold=0.8, rgb=False):
"""函数功能:找到最优结果."""
# 第一步:校验图像输入
check_source_larger_than_search(im_source, im_search)
# 第二步:计算模板匹配的结果矩阵res
res = _get_template_result_matrix(im_source, im_search)
# 第三步:依次获取匹配结果
min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(res)
h, w = im_search.shape[:2]
# 求取可信度:
confidence = _get_confidence_from_matrix(im_source, im_search, max_loc, max_val, w, h, rgb)
# 求取识别位置: 目标中心 + 目标区域:
middle_point, rectangle = _get_target_rectangle(max_loc, w, h)
best_match = generate_result(middle_point, rectangle, confidence)
LOGGING.debug("threshold=%s, result=%s" % (threshold, best_match))
return best_match if confidence >= threshold else None def _get_template_result_matrix(im_source, im_search):
"""求取模板匹配的结果矩阵."""
# 灰度识别: cv2.matchTemplate( )只能处理灰度图片参数
s_gray, i_gray = img_mat_rgb_2_gray(im_search), img_mat_rgb_2_gray(im_source)
return cv2.matchTemplate(i_gray, s_gray, cv2.TM_CCOEFF_NORMED)
3.2.特征匹配 cv2.FlannBasedMatcher(index_params,search_params).knnMatch(des1,des2,k=2)
def find_sift(im_source, im_search, threshold=0.8, rgb=True, good_ratio=FILTER_RATIO):
"""基于sift进行图像识别,只筛选出最优区域."""
# 第一步:检验图像是否正常:
if not check_image_valid(im_source, im_search):
return None # 第二步:获取特征点集并匹配出特征点对: 返回值 good, pypts, kp_sch, kp_src
kp_sch, kp_src, good = _get_key_points(im_source, im_search, good_ratio) # 第三步:根据匹配点对(good),提取出来识别区域:
if len(good) == 0:
# 匹配点对为0,无法提取识别区域:
return None
elif len(good) == 1:
# 匹配点对为1,可信度赋予设定值,并直接返回:
return _handle_one_good_points(kp_src, good, threshold) if ONE_POINT_CONFI >= threshold else None
elif len(good) == 2:
# 匹配点对为2,根据点对求出目标区域,据此算出可信度:
origin_result = _handle_two_good_points(im_source, im_search, kp_src, kp_sch, good)
if isinstance(origin_result, dict):
return origin_result if ONE_POINT_CONFI >= threshold else None
else:
middle_point, pypts, w_h_range = _handle_two_good_points(im_source, im_search, kp_src, kp_sch, good)
elif len(good) == 3:
# 匹配点对为3,取出点对,求出目标区域,据此算出可信度:
origin_result = _handle_three_good_points(im_source, im_search, kp_src, kp_sch, good)
if isinstance(origin_result, dict):
return origin_result if ONE_POINT_CONFI >= threshold else None
else:
middle_point, pypts, w_h_range = _handle_three_good_points(im_source, im_search, kp_src, kp_sch, good)
else:
# 匹配点对 >= 4个,使用单矩阵映射求出目标区域,据此算出可信度:
middle_point, pypts, w_h_range = _many_good_pts(im_source, im_search, kp_sch, kp_src, good) # 第四步:根据识别区域,求出结果可信度,并将结果进行返回:
# 对识别结果进行合理性校验: 小于5个像素的,或者缩放超过5倍的,一律视为不合法直接raise.
_target_error_check(w_h_range)
# 将截图和识别结果缩放到大小一致,准备计算可信度
x_min, x_max, y_min, y_max, w, h = w_h_range
target_img = im_source[y_min:y_max, x_min:x_max]
resize_img = cv2.resize(target_img, (w, h))
confidence = _cal_sift_confidence(im_search, resize_img, rgb=rgb) best_match = generate_result(middle_point, pypts, confidence)
print("[aircv][sift] threshold=%s, result=%s" % (threshold, best_match))
return best_match if confidence >= threshold else None # 如何找到特征点集
def _get_key_points(im_source, im_search, good_ratio):
"""根据传入图像,计算图像所有的特征点,并得到匹配特征点对."""
# 准备工作: 初始化sift算子
sift = _init_sift()
# 第一步:获取特征点集,并匹配出特征点对: 返回值 good, pypts, kp_sch, kp_src
kp_sch, des_sch = sift.detectAndCompute(im_search, None)
kp_src, des_src = sift.detectAndCompute(im_source, None)
# When apply knnmatch , make sure that number of features in both test and
# query image is greater than or equal to number of nearest neighbors in knn match.
if len(kp_sch) < 2 or len(kp_src) < 2:
raise NoSiftMatchPointError("Not enough feature points in input images !") # 匹配两个图片中的特征点集,k=2表示每个特征点取出2个最匹配的对应点:
matches = FLANN.knnMatch(des_sch, des_src, k=2)
good = []
# good为特征点初选结果,剔除掉前两名匹配太接近的特征点,不是独特优秀的特征点直接筛除(多目标识别情况直接不适用)
for m, n in matches:
if m.distance < good_ratio * n.distance:
good.append(m)
# good点需要去除重复的部分,(设定源图像不能有重复点)去重时将src图像中的重复点找出即可
# 去重策略:允许搜索图像对源图像的特征点映射一对多,不允许多对一重复(即不能源图像上一个点对应搜索图像的多个点)
good_diff, diff_good_point = [], [[]]
for m in good:
diff_point = [int(kp_src[m.trainIdx].pt[0]), int(kp_src[m.trainIdx].pt[1])]
if diff_point not in diff_good_point:
good_diff.append(m)
diff_good_point.append(diff_point)
good = good_diff return kp_sch, kp_src, good # sift对象
def _init_sift():
"""Make sure that there is SIFT module in OpenCV."""
if cv2.__version__.startswith("3."):
# OpenCV3.x, sift is in contrib module, you need to compile it seperately.
try:
sift = cv2.xfeatures2d.SIFT_create(edgeThreshold=10)
except:
print("to use SIFT, you should build contrib with opencv3.0")
raise NoSIFTModuleError("There is no SIFT module in your OpenCV environment !")
else:
# OpenCV2.x, just use it.
sift = cv2.SIFT(edgeThreshold=10) return sift
以上两个匹配算法,哪个优先匹配上了,就直接返回结果
三、airTest的简单脚本运行机制
3.1 打开ariTestIDE,编写一个脚本,默认命名为: untitled.air
3.2 连接你的设备
3.3 编写一个简单的脚本
3.4 运行脚本
脚本实际显示的信息如下:
touch(Template(r"tpl1551777086787.png", record_pos=(0.379, 0.922), resolution=(1080, 2160)))
wait(Template(r"tpl1551778382115.png", record_pos=(-0.003, -0.551), resolution=(1080, 2160)))
touch(Template(r"tpl1551775745377.png", record_pos=(-0.007, -0.547), resolution=(1080, 2160)))
text("cmq00002@qq.com")
其中的record_pos为 【计算坐标对应的中点偏移值相对于分辨率的百分比】;【tpl1551777086787.png】为你在编写脚本时候截图的小图片
官网: http://airtest.netease.com/
官方API文档: https://airtest.readthedocs.io/zh_CN/latest/index.html
参考:https://blog.csdn.net/tianmi1988/article/details/84798720
airTest 使用体验的更多相关文章
- 非常好用的1款UI自动化测试工具:airTest
网易团队开发的UI自动化测试神器airTest,下载地址:http://airtest.netease.com/tutorial/Tutorial.html Appium和airTest对比,我的看法 ...
- 写了10000条Airtest截图脚本总结出来的截图经验,赶紧收藏!
前言 今天想先给大家分享1个小白用户的Airtest从入门到放弃的故事: 小A是一个自动化的小白,在逛测试论坛的时候,偶然间发现了Airtest这个基于图像识别的UI自动化框架. 出于好奇,小A试用了 ...
- Android UI体验之全屏沉浸式透明状态栏效果
前言: Android 4.4之后谷歌提供了沉浸式全屏体验, 在沉浸式全屏模式下, 状态栏. 虚拟按键动态隐藏, 应用可以使用完整的屏幕空间, 按照 Google 的说法, 给用户一种 身临其境 的体 ...
- 移动端之Android开发的几种方式的初步体验
目前越来越多的移动端混合开发方式,下面列举的大多数我都略微的尝试过,就初步的认识写个简单的心得: 开发方式 开发环境 是否需要AndroidSDK 支持跨平台 开发语言&技能 MUI Win+ ...
- TODO:小程序开发过程之体验者
TODO:小程序开发过程之体验者 1. 小程序开发过程,先下载开发者并安装开发者工具,现在腾讯开放测试了,普通用户也可以登录开发者工具,如图普通用户登录为调试类型,但是只能建立无AppID的项目 如果 ...
- 微信小程序体验(2):驴妈妈景区门票即买即游
驴妈妈因为出色的运营能力,被腾讯选为首批小程序内测单位.驴妈妈的技术开发团队在很短的时间内完成了开发任务,并积极参与到张小龙团队的内测问题反馈.驴妈妈认为,移动互联网时代,微信是巨大的流量入口,也是旅 ...
- 一起学微软Power BI系列-使用技巧(3)Power BI安卓手机版安装与体验
Power BI有手机版,目前支持安卓,苹果和WP,不过没有WP手机,苹果在国内还不能用,要FQ和用就不测试了.安卓的我也也是费了九牛二虎之力才把app下载下来,把方法分享给大家. FQ太麻烦,所以建 ...
- .NET平台开源项目速览(15)文档数据库RavenDB-介绍与初体验
不知不觉,“.NET平台开源项目速览“系列文章已经15篇了,每一篇都非常受欢迎,可能技术水平不高,但足够入门了.虽然工作很忙,但还是会抽空把自己知道的,已经平时遇到的好的开源项目分享出来.今天就给大家 ...
- Xamarin+Prism开发详解四:简单Mac OS 虚拟机安装方法与Visual Studio for Mac 初体验
Mac OS 虚拟机安装方法 最近把自己的电脑升级了一下SSD固态硬盘,总算是有容量安装Mac 虚拟机了!经过心碎的安装探索,尝试了国内外的各种安装方法,最后在youtube上找到了一个好方法. 简单 ...
随机推荐
- 8、Zookeeper分布式锁
基础知识:http://www.cnblogs.com/LiZhiW/p/4931577.html 1 可重入读写锁示例代码如下(lock.acquire加几个,就必须使用几个lock.release ...
- linux日志logger命令详解
通过logger命令记录日志 logger是一个shell命令接口,可以通过该接口使用Syslog的系统日志模块,还可以从命令行直接向系统日志文件写入一行信息. ------------------- ...
- WordPress版微信小程序3.5版发布
最近花时间对WordPress版微信小程序做了一些完善和调整,修复不少程序的问题.一个程序的完善是持续和渐进的,没有最好,只有更完善.虽然会采纳一些用户的建议和意见,但我会从一个产品角度去考虑,哪些功 ...
- Linq to SQL -- Join
Join操作 适用场景:在我们表关系中有一对一关系,一对多关系,多对多关系等.对各个表之间的关系,就用这些实现对多个表的操作. 说明:在Join操作中,分别为Join(Join查询), SelectM ...
- alpha阶段发布博客
我们的Phylab网站发布了! Alpha版本功能 模块 功能 注册界面 根据邮箱,学号等信息注册新用户 登陆界面 根据账号信息登陆 用户界面 查看,修改用户信息和签名 实验报告界面 查看各个实验预习 ...
- git 推送远程仓库和删除远程仓库文件
提交到远程仓库需要现在GitHub或gitlab上创建项目,然后才能连接到远程仓库 1.连接远程仓库 # git remote add origin https://github.com/xxxxx ...
- 来源于知乎专栏:https://zhuanlan.zhihu.com/p/29619457
1. 校验数字的表达式 1 数字:^[0-9]*$ 2 n位的数字:^\d{n}$ 3 至少n位的数字:^\d{n,}$ 4 m-n位的数字:^\d{m,n}$ 5 零和非零开头的数字:^(0|[1- ...
- 【转】【测试用例设计】WEB通用测试用例
易用性 1.便于使用.理解.并能减少用户发生错误选择的可能性 2.当数据字段过多时,使用便于用户迅速吸取信息的方式表现信息,突出重点信息,标红等方式 3.显示与当前操作相关的信息,给出操作提示. 4. ...
- 导入myeclipse的java源码查看不了的问题
导入之前自己的jar包后 ,可以正常使用了,但是发现按ctrl+鼠标左键查看不了源代码.attach source 来源后,还是没有效果. 先添加所要使用的jar包, 然后再添加源文件.最后终于显示成 ...
- docx httpheader头设置
设置contentType内容类型如下: Extension MIME Type .doc application/msword .dot application/msword .docx appli ...