TI 77GHZ雷达开发套件 RDP-DC100
RDP-DC100用户使用手册
目录
1. 硬件说明... 3
1.1. 官方处理板的修改... 3
1.2. 硬件连接关系... 5
2. 驱动安装... 6
3. 基于MATLAB的demo. 8
3.1. 标准帧实时采集... 8
3.2. 高级帧模式实时采集... 10
3.3. 时分MIMO模式实时采集... 12
3.4. BPM MIMO模式实时采集... 14
3.5. 离线采集模式... 16
4. 附录... 19
4.1. 数据文件格式... 19
5. 联系方式... 22
1. 硬件说明
RDP-DC100为本公司的77G雷达开发平台,该平台可与TI AWR1642开发板配套工作,实现AWR1642中频数据的高速实时采集。PC与RDP-DC100间仅通过USB3.0接口进行通信。用户可通过操作PC机端软件,实现对AWR1642的参数配置,数据采集,实时显示等工作目前可支持TI 官方版AWR1642及本公司自研AWR1642开发板。
整个系统仅使用+5V供电即可。
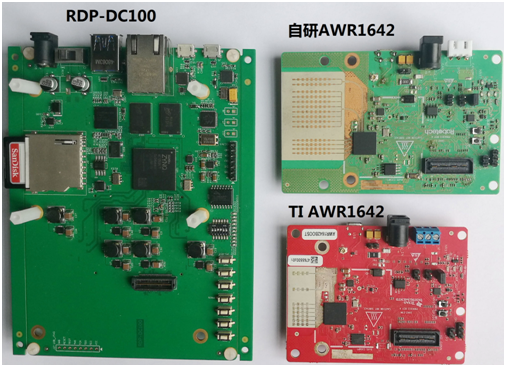
图 1 RDP-DC100开发套件硬件模块组成
表格 1 RDP-DC100特点
|
1 |
RDP-DC100与上位机之间通过USB3.0进行通信,USB3.0数据率6Gbps,能够保证AWR1642在超高数据率配置下不丢帧传输。 |
|
2 |
RDP-DC100自带16GB高速SD卡, RDP-DC100能够自动从SD卡中读取用户存入的配置文件,自行配置AWR1642并进行高速雷达数据离线采集,采集的数据文件可以很方便地通过电脑进行处理。 |
|
3 |
本公司提供完备的应用案例,用户可根据自己的应用场景,在相应案例的基础上进行修改,可极大地降低用户的开发难度。例如用户希望AWR1642使用两组工作参数(不同斜率、采样率等)交替工作,则可以在高级帧模式案例中修改,如对角度精度要求高,则可以在MIMO模式案例中修改,该模式包含8个通道数据。 |
|
4 |
本公司提供的经典案例均为基于MATLAB的,简单且容易上手,用户不需要关注具体的硬件、数据排列、程序语言等问题,可以将经历聚焦在算法研究上面,为用户算法验证工作提供极大便利。 |
|
5 |
本公司提供完备的技术支持服务和咨询服务,保证用户将RDP-DC100雷达系统完美的应用起来,。目前RDP-DC100已能够支持AWR1243的基本配置,后续将提供基于AWR1243的相关案例, |
1.1. 官方处理板的修改
1) 若采用本公司自主研发的基于TI AWR1642芯片雷达前端处理板RDP-F100(即自研AWR1642),则不需做任何修改,即可实现与RDP-DC100的协同工作。
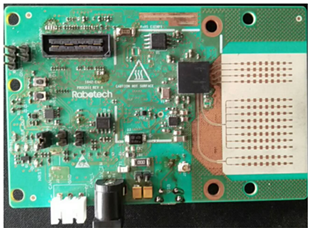
图 2本公司自研的RDP-F100前端处理板
2) 若采用TI AWR1642开发板,需做必要的修改。
- 硬件上。为了实现RDP-DC100对AWR1642进行供电、配置的功能,必须将官方AWR1642开发板中的一些电阻焊接上。具体为:
|
信号名 |
作用 |
|
|
AR_RS232RX |
将R33短接或焊接0Ω电阻 |
将串口线RX接入RDP-DC100 |
|
AR_RS232TX |
将R21短接或焊接0Ω电阻 |
将串口线TX接入RDP-DC100 |
|
5V_IN |
将R34短接或焊接0Ω电阻 |
接通RDP-DC100与开发板的电源线 |
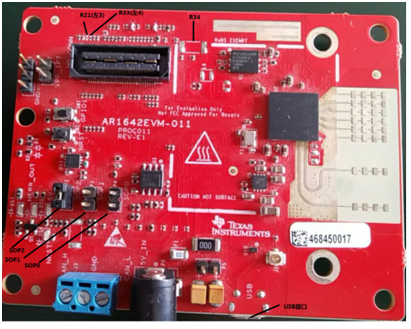
图 3 TI AWR1642开发板硬件修改示意图
- 软件上。TI AWR1642开发板必须烧录我司开发的固件程序(AWR1642Program.bin),方能采集原始数据。
更新AWR1642固件程序的步骤为::
step1:将AWR1642开发板SOP0和SOP2使用跳线帽短接,开发板进入烧录模式,SOP位置如图 3所示。
step2:将AWR1642开发板的USB接口连接到PC机,并对AWR1642开发板单独供电,USB接口位置如图 3所示。
step3:使用TI的 Uniflash工具将AWR1642Program.bin文件烧录到AWR1642芯片
step4:再将SOP0短路环去掉(AWR1642正常工作模式)。
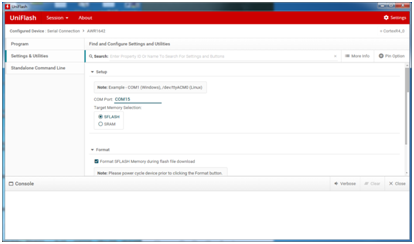
图 4 AWR1642固件更新-选择串口
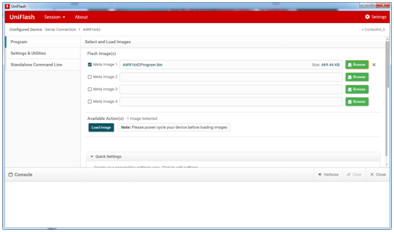
图 5 AWR1642固件更新-选择烧录文件
1.2. 硬件连接关系
如图 6所示,用螺柱将AWR1642开发板固定在RDP-DC100之上,并使用Samtec线将官方1642开发板的J1与RDP-DC100的P1接口相连接,并将RDP-DC100的USB接口连接到PC机,将RDP-DC100接通+5V电源,至此完成了该开发套件的硬件连接。
打开电源开关,当RDP-DC100的工作指示灯开始闪烁,官方1642开发板电源指示灯常亮时,表明RDP-DC100与1642开发板均正常启动。
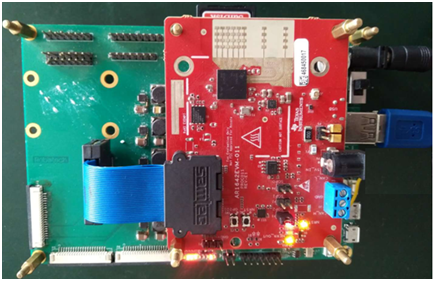
图 6 硬件连接关系
2. 驱动安装
Step1:RDP-DC100上电,USB接口连接电脑,打开电脑设备管理器。如下图 7所示:
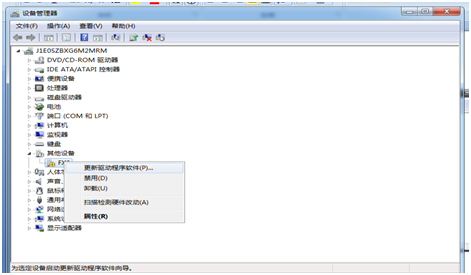
图 7 进入驱动更新界面
Step2:选择USB驱动手动安装,如上图 8所示。

图 8 选择驱动程序所在目录
Step3:等待安装,如图 9所示。
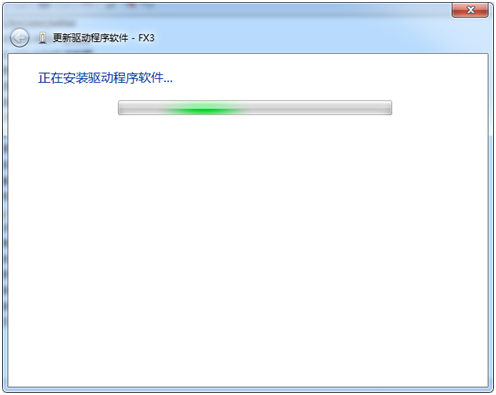
图 9 等待安装完成
Step4:如图 10所示,电脑添加光标处驱动名称。表示安装完成。
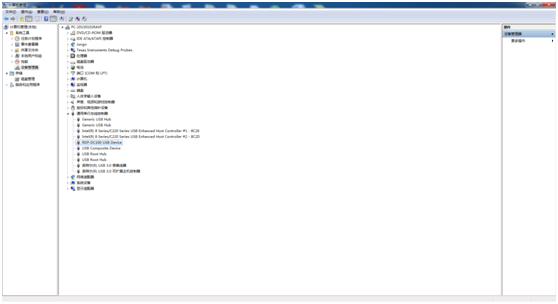
图 10 安装成功界面
3. 基于MATLAB的demo
3.1. 标准帧实时采集
该配置文件设计的标准帧共开通4个接收通道,标准帧包含128个chirp,每个chirp采集128个复数采样点,该chirp使用TX0天线进行发射。
step1:打开标准帧程序所在目录,打开标准帧程序StandardFrameDemo.m
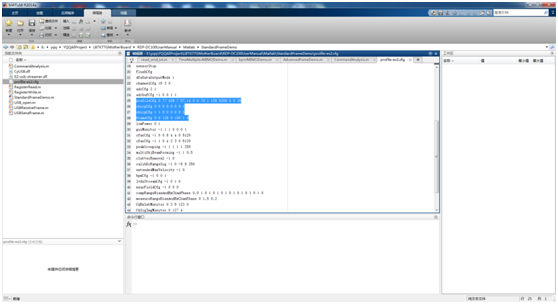
图 11 标准帧配置文件
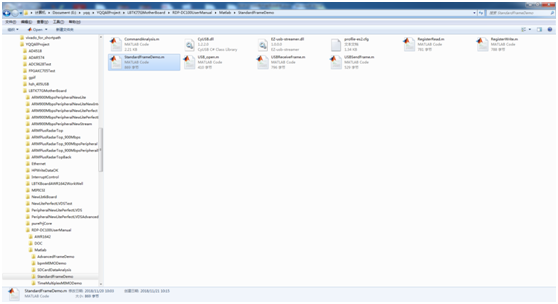
图 12 标准帧实时采集分析程序
step2:点击运行按钮,MATLAB程序会将配置文件发送到RDP-DC100,由RDP-DC100对AWR1642进行配置,配置成功后进入实时采集显示模式,示例程序显示了4个通道的时域和二维FFT结果波形。
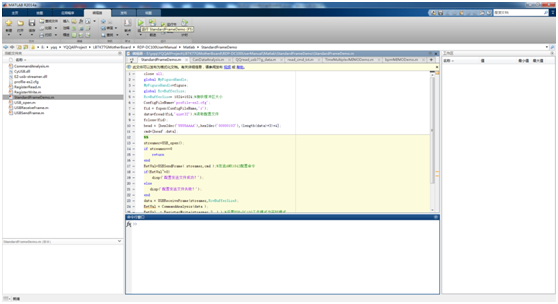
图 13 点击运行按钮
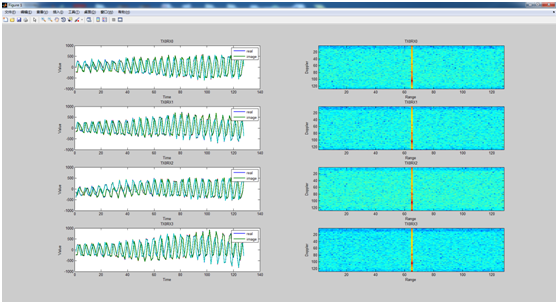
图 14 标准帧实时采集显示
3.2. 高级帧模式实时采集
该配置文件设计的高级帧共开通2个接收通道,该高级帧包含2个子帧,第一个子帧使用chirp0,chirp0使用的TX0天线,共包含128个chirp,每个chirp采集128个点。第二个子帧使用chirp1,chirp1使用的TX1天线,共64个chirp,每个chirp采集128个复数采样点.
step1:打开高级帧程序所在目录,打开高级帧程序AdvancedFameDemo.m
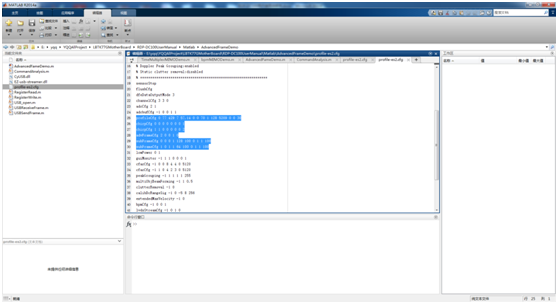
图 15 高级帧配置文件
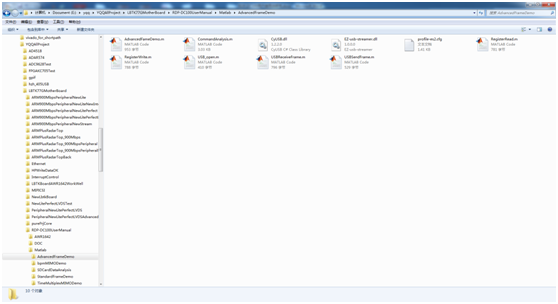
图 16 高级帧程序所在目录
step2:点击运行按钮,MATLAB程序会将配置文件发送到RDP-DC100,由RDP-DC100对AWR1642进行配置,配置成功后进入实时采集显示模式,示例程序显示了2个子帧,每个子帧2个接收通道的时域和二维FFT结果波形。
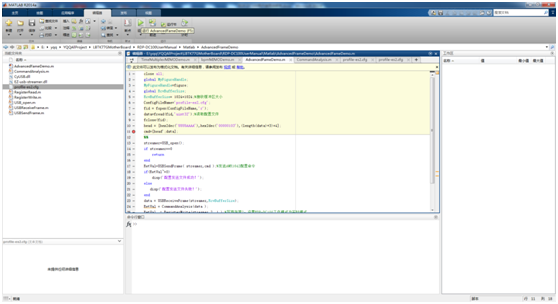
图 17 点击运行按钮
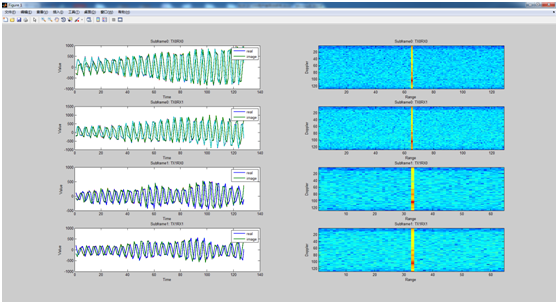
图 18高级帧程序运行结果
3.3. 时分MIMO模式实时采集
该配置文件设计的标准帧为时分MIMO模式,共开通4个接收通道,使用了chirp0和chirp1两种chirp,chirp0使用TX0发射,chirp1使用TX1发射。chirp0和chirp1交替发射。该帧包含128,每个chirp采集128个复数采样点,因此,MIMO共分为8个通道。
step1:打开时分MIMO程序所在目录,打开时分MIMO程序TimeMultiplexMIMODemo.m
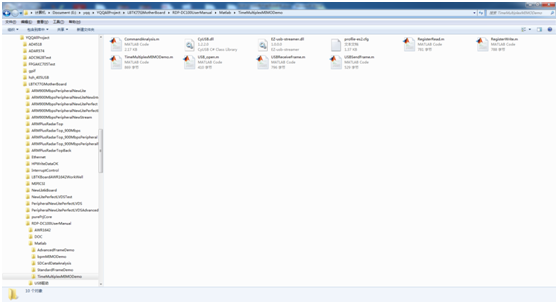
图 19时分MIMO程序所在目录
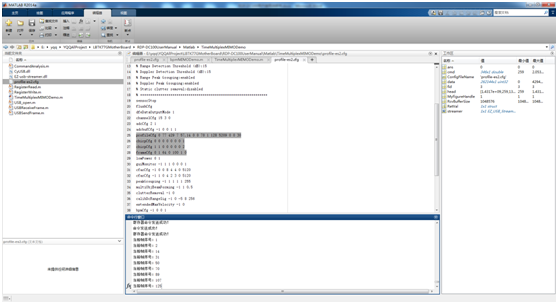
图 20 时分MIMO配置文件
step2:点击运行按钮,MATLAB程序会将配置文件发送到RDP-DC100,由RDP-DC100对AWR1642进行配置,配置成功后进入实时采集显示模式,示例程序显示了8个接收通道的时域和二维FFT结果波形。
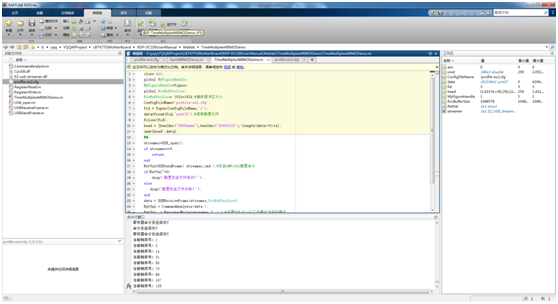
图 21点击运行按钮
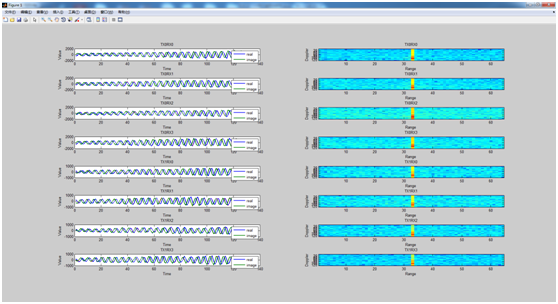
图 22时分MIMO程序运行结果
3.4. BPM MIMO模式实时采集
该配置文件设计的模式为BPM MIMO模式。共开通4个接收通道,使用Chirp0和chirp1,chirp0的TX0、TX1初始相位0°,chirp1 的TX0初始相位0°,TX1的初始相位180°。包含128个chirp,每个chirp采集128个复数采样点。因此MIMO通道共有8个。
step1:打开BPM MIMO程序所在目录,打开标准帧程序bpmMIMODemo.m
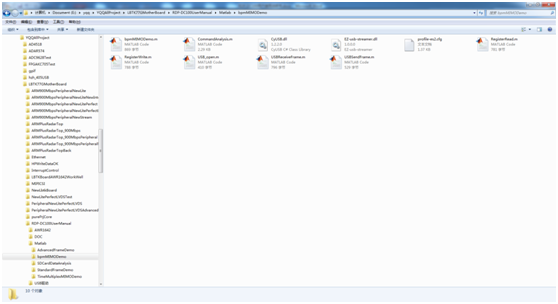
图 23打开BPM MIMO程序所在目录

图 24BPM配置文件
step2:点击运行按钮,MATLAB程序会将配置文件发送到RDP-DC100,由RDP-DC100对AWR1642进行配置,配置成功后进入实时采集显示模式,示例程序显示了8个接收通道的时域和二维FFT结果波形。
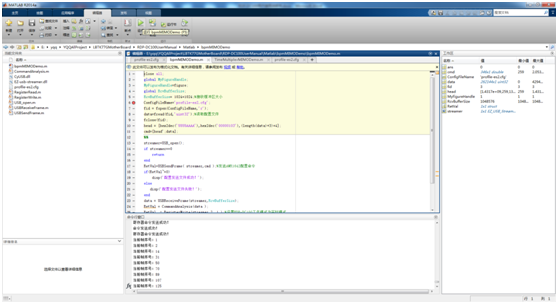
图 25点击运行按钮
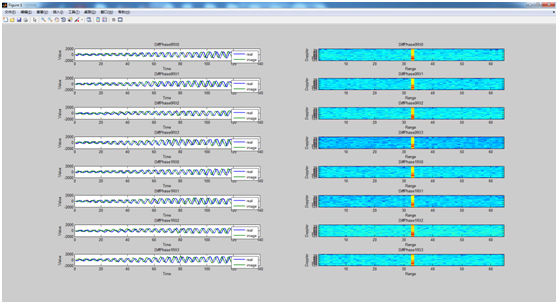
图 26BPM MIMO程序运行结果
3.5. 离线采集模式
离线采集模式的意思是:RDP-DC100使用SD卡中存储的配置文件profile.cfg配置AWR1642,并将采集的数据以文件形式存储到SD卡。RDP-DC100的SD卡容量16GB,最大实时存储速度为12MB/S。
step1:将配置文件profile.cfg拷贝到SD卡中。
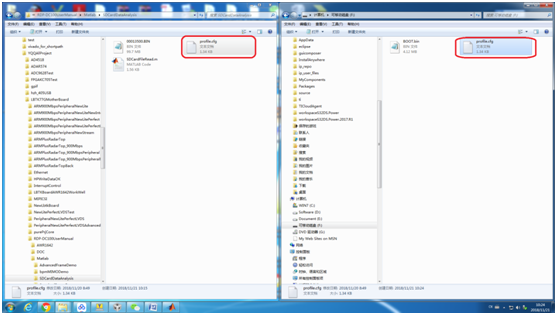
图 27 拷贝配置文件profile-es1.cfg
step2:将SD插入到RDP-DC100的SD卡槽中,待RDP-DC100上电完成,按下SW2按钮,若软件指示LED灯进入快闪形式,则代表离线采集模式启动成功,当一个文件存储满100MB,程序将自动新建文件继续存储,直到用户再次按下SW2时,RDP-DC100才会停止采集,并将当前在DDR中的缓存帧写入SD卡后,关闭文件。
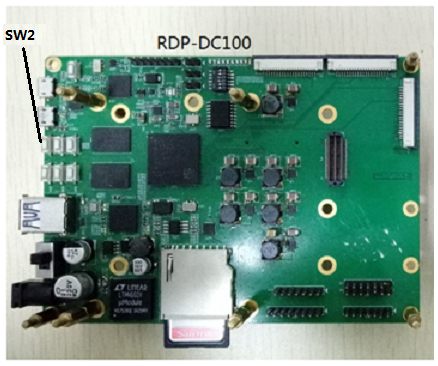
图 28 SW2位置指示
step3:再次按下SW2按钮,系统停止采集。
step:4:查看SD卡中的文件,00013500.bin即为离线采集的原始数据,用户使用SD卡的配置文件对离线采集的原始数据进行分析即可。结果如图 31所示。
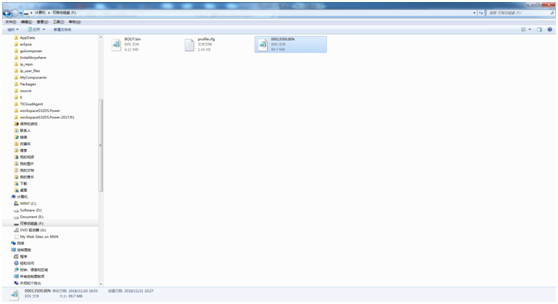
图 29 查看离线采集数据文件
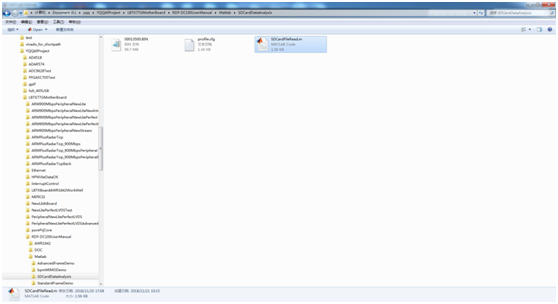
图 30离线采集数据分析程序
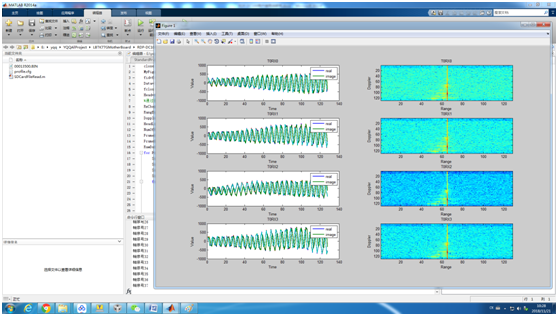
图 31离线采集数据结果显示
4. 附录
4.1. 数据文件格式
保存的数据文件由文件头和文件体组成,文件头共2048个字节,其内容是AWR1642的配置文件,文件体由采集到的AWR1642的中频ADC数据组成,ADC数据为int16数据类型。
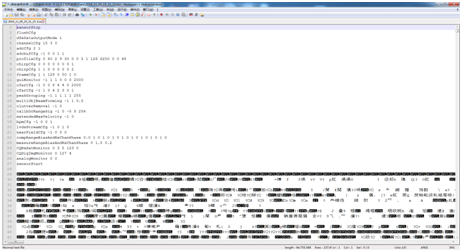
图 32 数据文件头部
采用hex显示,查找“5555AAAA”,即可定位到帧数据所在的起始位置。
文件体中的数据以帧为单位顺序排列,其中每帧数据的帧格式如下表所示,其中帧长N为包括帧起始符在内的整个帧数据的字节数。
|
帧头 |
帧起始符(4B) |
0x5555AAAA |
|
命令号(4B) |
0x000000004 |
|
|
帧字节数(4B) |
N |
|
|
帧序号(4B) |
0-2^32 |
|
|
CH0.chirp0 |
(2B) |
DATA[0].Real |
|
(2B) |
DATA[0].Img |
|
|
(2B) |
DATA[1].Real |
|
|
(2B) |
DATA[1].Img |
|
|
....... |
...... |
|
|
(2B) |
DATA[n].Real |
|
|
(2B) |
DATA[n].Img |
|
|
CH1.chirp0 |
(2B) |
DATA[0].Real |
|
(2B) |
DATA[0].Img |
|
|
(2B) |
DATA[1].Real |
|
|
(2B) |
DATA[1].Img |
|
|
....... |
... |
|
|
(2B) |
DATA[n].Real |
|
|
(2B) |
DATA[n].Img |
|
|
CH2.chirp0 |
(2B) |
DATA[0].Real |
|
(2B) |
DATA[0].Img |
|
|
(2B) |
DATA[1].Real |
|
|
(2B) |
DATA[1].Img |
|
|
....... |
... |
|
|
(2B) |
DATA[n].Real |
|
|
(2B) |
DATA[n].Img |
|
|
CH3.chirp0 |
(2B) |
DATA[0].Real |
|
(2B) |
DATA[0].Img |
|
|
(2B) |
DATA[1].Real |
|
|
(2B) |
DATA[1].Img |
|
|
....... |
... |
|
|
(2B) |
DATA[n].Real |
|
|
(2B) |
DATA[n].Img |
|
|
CH0.chirp1 |
(2B) |
DATA[0].Real |
|
(2B) |
DATA[0].Img |
|
|
(2B) |
DATA[1].Real |
|
|
(2B) |
DATA[1].Img |
|
|
....... |
... |
|
|
(2B) |
DATA[n].Real |
|
|
(2B) |
DATA[n].Img |
|
|
CH1.chirp1 |
(2B) |
DATA[0].Real |
|
(2B) |
DATA[0].Img |
|
|
(2B) |
DATA[1].Real |
|
|
(2B) |
DATA[1].Img |
|
|
....... |
... |
|
|
(2B) |
DATA[n].Real |
|
|
(2B) |
DATA[n].Img |
|
|
CH2.chirp1 |
(2B) |
DATA[0].Real |
|
(2B) |
DATA[0].Img |
|
|
(2B) |
DATA[1].Real |
|
|
(2B) |
DATA[1].Img |
|
|
....... |
... |
|
|
(2B) |
DATA[n].Real |
|
|
(2B) |
DATA[n].Img |
|
|
CH3.chirp1 |
(2B) |
DATA[0].Real |
|
(2B) |
DATA[0].Img |
|
|
(2B) |
DATA[1].Real |
|
|
(2B) |
DATA[1].Img |
|
|
....... |
... |
|
|
(2B) |
DATA[n].Real |
|
|
(2B) |
DATA[n].Img |
|
|
...... |
...... |
..... |
|
CH0.chirpx |
(2B) |
DATA[0].Real |
|
(2B) |
DATA[0].Img |
|
|
(2B) |
DATA[1].Real |
|
|
(2B) |
DATA[1].Img |
|
|
....... |
... |
|
|
(2B) |
DATA[n].Real |
|
|
(2B) |
DATA[n].Img |
|
|
CH1.chirpx |
(2B) |
DATA[0].Real |
|
(2B) |
DATA[0].Img |
|
|
(2B) |
DATA[1].Real |
|
|
(2B) |
DATA[1].Img |
|
|
....... |
... |
|
|
(2B) |
DATA[n].Real |
|
|
(2B) |
DATA[n].Img |
|
|
CH2.chirpx |
(2B) |
DATA[0].Real |
|
(2B) |
DATA[0].Img |
|
|
(2B) |
DATA[1].Real |
|
|
(2B) |
DATA[1].Img |
|
|
....... |
... |
|
|
(2B) |
DATA[n].Real |
|
|
(2B) |
DATA[n].Img |
|
|
CH3.chirpx |
(2B) |
DATA[0].Real |
|
(2B) |
DATA[0].Img |
|
|
(2B) |
DATA[1].Real |
|
|
(2B) |
DATA[1].Img |
|
|
....... |
... |
|
|
(2B) |
DATA[n].Real |
|
|
(2B) |
DATA[n].Img |
5. 联系方式
公司名称:湖南雷行智达科技有限公司
联系人:邱先生,手机:13875948373,微信:qzk44397201,QQ:44397201;
尹先生,手机:15581648519,微信:同手机号,QQ:2944503003。
TI 77GHZ雷达开发套件 RDP-DC100的更多相关文章
- 【DSP开发】【计算机视觉】TI 视觉软件开发套件ADAS
关键字:TI 视觉软件开发套件 ADAS 日前,德州仪器 (TI) 宣布推出其视觉软件开发套件(SDK),从而为开发人员提供了一款灵活的框架.一组丰富齐全的硬件设备驱动程序和一套适用的开发工具,可 ...
- 开源物联网框架ServerSuperIO 3.0正式发布(C#),跨平台:Win&Win10 Iot&Ubuntu&Ubuntu Mate,一套设备驱动跨平台挂载,附:开发套件和教程。
3.0版本主要更新内容: 1.增加跨平台能力:Win&Win10 Iot&Ubuntu&Ubuntu Mate 2.统一设备驱动接口:可以一套设备驱动,跨平台挂载运行,降低人力 ...
- 全球首个全流程跨平台界面开发套件,PowerUI分析
一. 首个全流程跨平台界面开发套件,PowerUI正式发布 UIPower在DirectUI的基础上,自主研发全球首个全流程跨平台界面开发套件PowerUI(PUI)正式发布,PowerU ...
- uTenux\AT91SAM3S4C开发套件———硬件电路介绍
无论写什么嵌入式软件,我们都应该首先对硬件有所了解,这样更有助于我们写出高效精简的程序代码.本次活动我们使用的硬件平台是有悠龙公司提供的uTenux\AT91SAM3S4C开发套件,在悠龙公司的主页可 ...
- 旨在脱离后端环境的前端开发套件 - IDT Server篇
IDT,一个基于Nodejs的,旨在脱离后端环境的前端开发套件,目的就是能让前端开发完全脱离后端的环境,无论后端是什么模板引擎(主流),都能应付自如. IDT主要包括两大部分:Server + Bui ...
- 旨在脱离后端环境的前端开发套件 - IDT之Server篇
IDT,一个基于Nodejs的,旨在脱离后端环境的前端开发套件,目的就是能让前端开发完全脱离后端的环境,无论后端是什么模板引擎(主流),都能应付自如. IDT主要包括两大部分:Server + Bui ...
- TI Davinci DM6446开发攻略——开发环境搭建
TI DAVINCI DM6446的开发环境搭建不像三星S3C2410,S3C2440,ATMEL的AT91SAM9260之类的单核ARM那么简单,因为DM6446还有DSP端的开发环境,以及双核之间 ...
- 如此繁荣的移动webapp开发市场:总结当下的一些移动web开发套件
写在前面: 因为移动市场的盛行带动了移动社交.移动购物.手游.智能化硬件等多个新兴领域.智能终端硬件水平越来越高,运行其上的web浏览器能力也越来越强,加上HTML5\JS\CSS的蓬勃发展,Web已 ...
- 基于 Intraweb 和 JQuery 的开发套件
基于 Intraweb 和 JQuery 的开发套件 http://www.cgdevtools.com/ 开发速度无敌,界面也非常美. 我的web短板终于解决了.....!!!!..!!! 做一个小 ...
随机推荐
- Python爬虫(一):基本概念
网络爬虫的定义 网络爬虫(Web Spider.又被称为网页蜘蛛.网络机器人,又称为网页追逐者),是一种依照一定的规则,自己主动的抓取万维网信息的程序或者脚本.另外一些不常使用的名字 ...
- 服务器端将复合json对象传回前端
前端接收后端传过来的JSON对象,对前端来说,传过来的确实就是JSON对象:但后端,类型则灵活得多,可以是IList<>等类型,当然也可以是newtonsoft的JObject类型.反正在 ...
- node.js 在函数内获取当前函数
js 如何在函数体内部知道 自己在哪个函数内运行呢? 打比方: function a() { // 我想在这里知道我的函数名a和函数function a () {...} } 使用Error的调用栈可 ...
- Oracle 11g密码过期问题及解决方案
问题: 在自用的一个系统里,连接的是本地自建的一个数据库.用sqldeveloper登录数据库.提示如下图: 提示:密码过期 解决方案: 密码过期一般存在两种可能: 由于Oracle中默认在defau ...
- 洛谷 P1181,1182 数列分段Section
数列分段Section I 题目描述 对于给定的一个长度为N的正整数数列A[i],现要将其分成连续的若干段,并且每段和不超过M(可以等于M),问最少能将其分成多少段使得满足要求. 输入输出格式 输入格 ...
- robo 3t 在 ubuntu下安装
如果您尝试安装最新版本robomobo调用可以现在robo3t.或者你尝试在Ubuntu 16.04上安装,按照下面的步骤和你的robomongo安装 下载最新的robomongo tar文件 wge ...
- 卸载CentOS7-x64自带的OpenJDK的方法
第一步:查看并卸载CentOS自带的OpenJDK 安装好的CentOS会自带OpenJdk,用命令 java -version ,会有下面的信息: java version "1.6.0& ...
- Varnish的VCL
Varnish的子进程 VCL Varnish配置语言VCL是一种"域"专有类型的配置语言,用于描述Varnish Cache的请求处理和文档高速缓存策略. 当加载新配置时,Man ...
- bzoj 1753: [Usaco2005 qua]Who's in the Middle【排序】
--这可能是早年Pascal盛行的时候考排序的吧居然还是Glod-- #include<iostream> #include<cstdio> #include<algor ...
- [App Store Connect帮助]六、测试 Beta 版本(3.3)管理测试员:查看测试员信息
如果您使用“TestFlight Beta 版测试”,您可以查看关于测试员的信息,并衡量测试员的参与度. 必要职能:“帐户持有人”职能.“管理”职能.“App 管理”职能.“开发者”职能或“营销”职能 ...