stm32寄存器版学习笔记10 SPI
SPI(Serial Peripheral Interface),串行外围设备接口。SPI是一种高速的、全双工、同步的通信总线。
SPI接口一般使用4条线通信:
MISO 主设备数据输入,从设备数据输出
MOSI 主设备数据输出,从设备数据输入
SCLK 时钟信号,有主设备产生
CS 从设备片选信号,有主设备控制
SPI模块为了和外设进行数据交换,根据外设工作要求,其输出串行同步时钟极性和相位可以进行配置。SPI_CR寄存器的CPOL(时钟极性)位,控制在没有数据传输时时钟的空闲状态电平,此位对主模式和从模式下的设备都有效。CPOL=0,串行同步时钟的空闲状态为低电平;CPOL=1,串行同步时钟的空闲状态为高电平。SPI_CR寄存器的CPHA(时钟相位)位,能配置用于选择两种不同的传输协议之一进行数据传输。CPHA=0,在串行同步时钟的第一个跳变沿(上升或下降)数据被采样;CPHA=1,在串行同步时钟的第二个跳变沿(上升或下降)数据被采样。
1.SPI主模式配置步骤
①使能SPI时钟,配置PA口

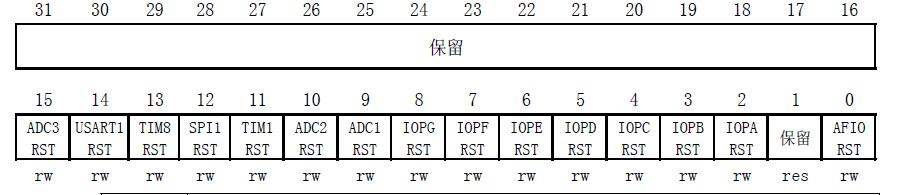
APB2外设时钟使能寄存器(RCC_APB2ENR)
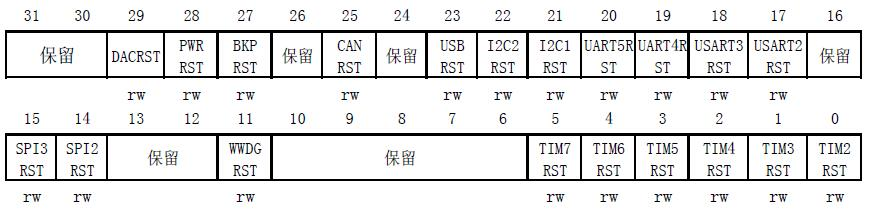
APB1外设复位寄存器 (RCC_APB1RSTR)
Eg:RCC->APB2ENR|=1<<2; //PORTA时钟使能
RCC->APB2ENR|=1<<12; //SPI1时钟使能
//这里只针对SPI口初始化
GPIOA->CRL&=0X000FFFFF;
GPIOA->CRL|=0XBBB00000;//PA5.6.7复用
GPIOA->ODR|=0X7<<5; //PA5.6.7上拉
②开全双工模式并软件管理NSS
SPI控制寄存器1(SPI_CR1)(I2S模式下不使用)

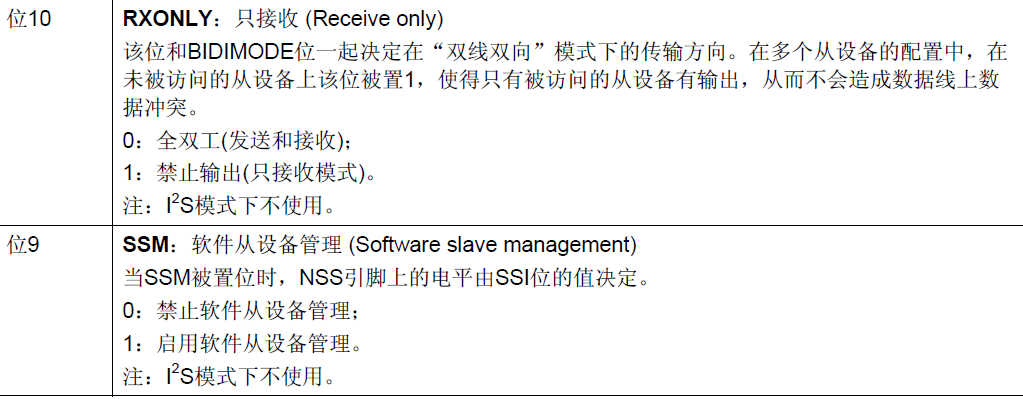

Eg:SPI1->CR1|=0<<10;//全双工模式
SPI1->CR1|=1<<9; //软件nss管理
SPI1->CR1|=1<<8;
③设置SPI为主机并设置数据帧格式
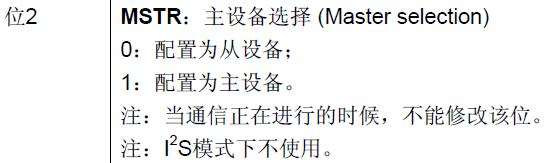
Eg:SPI1->CR1|=1<<2; //SPI主机
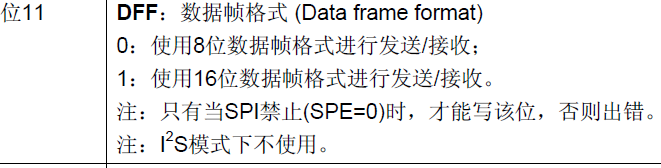
SPI1->CR1|=0<<11;//8bit数据格式
④设置时钟极性和相位极性
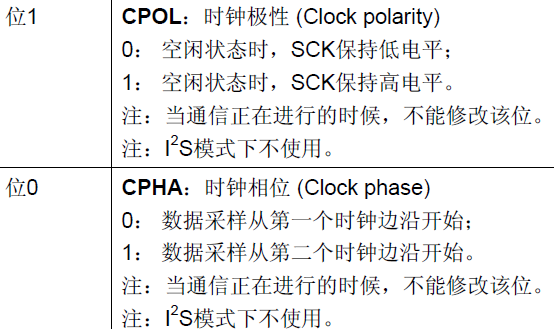
Eg:SPI1->CR1|=1<<1; //空闲模式下SCK为1 CPOL=1
SPI1->CR1|=1<<0; //数据采样从第二个时间边沿开始,CPHA=1
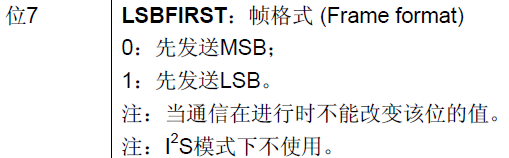
⑤传输速率和LSBFIRST帧格式设置

Eg:SPI1->CR1|=7<<3; //Fsck=Fcpu/256
SPI1->CR1|=0<<7; //MSBfirst
⑥使能SPI
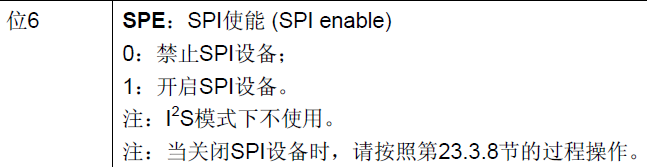
Eg:SPI1->CR1|=1<<6; //SPI设备使能
2.SPI
//SPI口初始化
//这里针是对SPI1的初始化
void SPI1_Init(void)
{
RCC->APB2ENR|=<<; //PORTA时钟使能
RCC->APB2ENR|=<<; //SPI1时钟使能 //这里只针对SPI口初始化
GPIOA->CRL&=0X000FFFFF;
GPIOA->CRL|=0XBBB00000;//PA5.6.7复用
GPIOA->ODR|=0X7<<; //PA5.6.7上拉 SPI1->CR1|=<<;//全双工模式
SPI1->CR1|=<<; //软件nss管理
SPI1->CR1|=<<; SPI1->CR1|=<<; //SPI主机
SPI1->CR1|=<<;//8bit数据格式
SPI1->CR1|=<<; //空闲模式下SCK为1 CPOL=1
SPI1->CR1|=<<; //数据采样从第二个时间边沿开始,CPHA=1
SPI1->CR1|=<<; //Fsck=Fcpu/256
SPI1->CR1|=<<; //MSBfirst
SPI1->CR1|=<<; //SPI设备使能
SPI1_ReadWriteByte(0xff);//启动传输(主要作用:维持MOSI为高)
}
//SPI1 速度设置函数
//SpeedSet:0~7
//SPI速度=fAPB2/2^(SpeedSet+1)
//APB2时钟一般为72Mhz
void SPI1_SetSpeed(u8 SpeedSet)
{
SpeedSet&=0X07; //限制范围
SPI1->CR1&=0XFFC7;
SPI1->CR1|=SpeedSet<<; //设置SPI1速度
SPI1->CR1|=<<; //SPI设备使能
}
//SPI1 读写一个字节
//TxData:要写入的字节
//返回值:读取到的字节
u8 SPI1_ReadWriteByte(u8 TxData)
{
u16 retry=;
while((SPI1->SR&<<)==)//等待发送区空
{
retry++;
if(retry>0XFFFE)return ;
}
SPI1->DR=TxData; //发送一个byte
retry=;
while((SPI1->SR&<<)==) //等待接收完一个byte
{
retry++;
if(retry>0XFFFE)return ;
}
return SPI1->DR; //返回收到的数据
}
spi.c
// SPI总线速度设置
#define SPI_SPEED_2 0
#define SPI_SPEED_4 1
#define SPI_SPEED_8 2
#define SPI_SPEED_16 3
#define SPI_SPEED_32 4
#define SPI_SPEED_64 5
#define SPI_SPEED_128 6
#define SPI_SPEED_256 7 void SPI1_Init(void); //初始化SPI口
void SPI1_SetSpeed(u8 SpeedSet); //设置SPI速度
u8 SPI1_ReadWriteByte(u8 TxData);//SPI总线读写一个字节 #endif
spi.h
stm32寄存器版学习笔记10 SPI的更多相关文章
- stm32寄存器版学习笔记07 ADC
STM32F103RCT有3个ADC,12位主逼近型模拟数字转换器,有18个通道,可测量16个外部和2个内部信号源.各通道的A/D转换可以单次.连续.扫描或间断模式执行. 1.通道选择 stm32把A ...
- stm32寄存器版学习笔记06 输入捕获(ETR脉冲计数)
STM32外部脉冲ETR引脚:TIM1-->PA12;TIMER2-->PA0:TIMER3-->PD2;TIMER4-->PE0… 1.TIM2 PA0计数 配置步骤 ①开启 ...
- stm32寄存器版学习笔记03 外部中断
stm32的每个I/O口都可以作为中断输入,要把I/O口设置为外部中断输入,必须将I/O口设置为上拉/下拉输入 或 浮空输入(但浮空的时候外部一定要带上拉或下拉电阻,否则可能导致 中断不停的触发),干 ...
- stm32寄存器版学习笔记05 PWM
STM32除TIM6和TIM7外都可以产生PWM输出.高级定时器TIM1和TIM8可以同时产生7路PWM,通用定时器可以产生4路PWM输出. 1.TIM1 CH1输出PWM配置步骤 ①开启TIM1时钟 ...
- stm32寄存器版学习笔记08 DMA
DMA(Direct Memory Access),直接存储器访问.DMA传输方式无需CPU直接控制传输,通过硬件为RAM与I/O设备开辟一条直接传送数据的通路,使CPU效率大大提高.stm32f10 ...
- stm32寄存器版学习笔记04 定时计数器中断
STM32共有8个定时计数器,其中TIME1和TIME8是高级定时器,TIME2~TIME5是通用定时器,TIME6和TIME7是基本定时器.以TIME3为例总结定时计数器的基本用法. 1.TIM3的 ...
- stm32寄存器版学习笔记02 串口通信
stm32F103RCT6提供5路串口.串口的使用,只要开启串口时钟,设置相应的I/O口的模式,然后配置下波特率.数据位长度.奇偶校验等信息,即可使用. 1.串口的配置步骤 ①串口时钟使能 APB2外 ...
- stm32寄存器版学习笔记01 GPIO口的配置(LED、按键)
STM32的I/O口可以由软件配置成如下8种模式:输入浮空.输入上拉.输入下拉.模拟输入.开漏输出.推挽输出.推挽式复用功能及开漏复用功能.每个I/O口由7个寄存器来控制:配置模式的端口配置寄存器CR ...
- stm32寄存器版学习笔记09 IIC
I²C(Inter-Integrated Circuit)总线是一种两线式串行总线,用于连接微控制器及其外设,是由数据线SDA和时钟SCL构成的串行总线,可发送和接收数据. IIC总线在传送数据过程中 ...
随机推荐
- 使用阿里云ECS安装HDFS的小问题
毕设涉及HDFS,理论看的感觉差不多了,想搭起来测试一下性能来验证以便进行开题报告,万万没想到装HDFS花费了许多天,踩了许多坑,记录一下. 背景:使用两台阿里云学生机ECS,分处不同账号不同区域,一 ...
- 【Python】 简易实现接口测试自动化
实现思路 使用excel管理用例用例信息,requests模块发送http请求,实现了记录日志,邮件发送测试报告的功能 目录结构如下: 下面直接上代码: 统筹脚本 # -*- coding:utf-8 ...
- Ubuntu下搭建Spark运行环境
安装Spark的方式 现在有两种安装方式: 安裝spark notebook:已經把spark, scala, hadoop等等包起來了,裝好就能用GUI介面操作,適合測試用. 傳統方式安裝:慢慢裝s ...
- 1-10 RHLE7 系统进程管理
1.1-Linux进程管理 程序.进程.线程 程序:一组指令的集合 QQ 进程:程序的执行就是进程.也可以把进程看成一个独立的程序,在内存中有其对应的代码空间和数据空间,一个进程所拥有的数据和代 ...
- iOS开发调试技巧总结(持续更新中)
作者:乞力马扎罗的雪 原文 对于软件开发而言,调试是必须学会的技能,重要性不言而喻.对于调试的技能,基本上是可以迁移的,也就是说你以前在其他平台上掌握的很多调试技巧,很多也是可以用在iOS开发中.不 ...
- tomcat安装图文教程
tomcat安装图文教程 运维 memory 发布于June 1, 2013 标签: Windows, Tomcat 下载Tomcat安装文件,官方下载地址是:http://tomcat.apache ...
- Ansible 开发调试 之【模块调试】
本地调试 需要安装jinja2 库 yum -y install python-jinja2 使用官方提供的测试脚本调试 git clone git://github.com/ansible/ansi ...
- 对一致性Hash算法,Java代码实现的深入研究(转)
转载:http://www.cnblogs.com/xrq730/p/5186728.html 一致性Hash算法 关于一致性Hash算法,在我之前的博文中已经有多次提到了,MemCache超详细解读 ...
- innerHTML的兼容性
问题描述: 给定一个表格,thead的内容一致,tbody的内容动态改变(内容,合并单元格等不同) 错误方案: 给tbody定义一个id,然后document.getElementById('id') ...
- firefox与ie 的javascript区别
1. Document.form.item 问题 现有问题: 现有代码中存在许多 document.formName.item("itemName") 这样的语句,不能在 ...