颜色追踪块CamShift---33
原创博客:转载请标明出处:http://www.cnblogs.com/zxouxuewei/
颜色追踪块CamShift滤波器。
首先确保你的kinect驱动或者uvc相机驱动能正常启动:(如果你使用的是kinect,请运行openni驱动)
roslaunch openni_launch openni.launch
如果你没有安装kinect深度相机驱动,请看我前面的博文。
然后运行下面的launch文件:
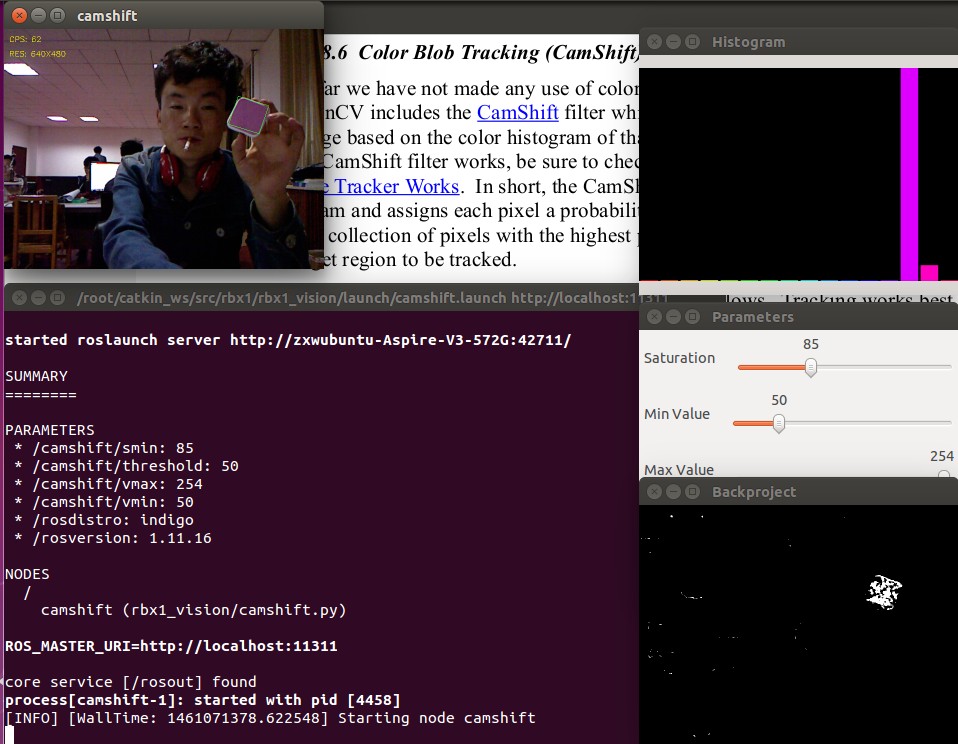
roslaunch rbx1_vision camshift.launch
当视频出现时,通过鼠标画矩形将图像中的某个对象框住。这个矩形表示所选的区域,试着移动所选的区域。
以下是我的实验结果:

看看代码:启动文件为:camshift.launch。
#!/usr/bin/env python """ camshift_node.py - Version 1.1 2013-12-20
Modification of the ROS OpenCV Camshift example using cv_bridge and publishing the ROI
coordinates to the /roi topic.
""" import rospy
import cv2
from cv2 import cv as cv
from rbx1_vision.ros2opencv2 import ROS2OpenCV2
from std_msgs.msg import String
from sensor_msgs.msg import Image
import numpy as np class CamShiftNode(ROS2OpenCV2):
def __init__(self, node_name):
ROS2OpenCV2.__init__(self, node_name) self.node_name = node_name # The minimum saturation of the tracked color in HSV space,
# as well as the min and max value (the V in HSV) and a
# threshold on the backprojection probability image.
self.smin = rospy.get_param("~smin", )
self.vmin = rospy.get_param("~vmin", )
self.vmax = rospy.get_param("~vmax", )
self.threshold = rospy.get_param("~threshold", ) # Create a number of windows for displaying the histogram,
# parameters controls, and backprojection image
cv.NamedWindow("Histogram", cv.CV_WINDOW_NORMAL)
cv.MoveWindow("Histogram", , )
cv.NamedWindow("Parameters", )
cv.MoveWindow("Parameters", , )
cv.NamedWindow("Backproject", )
cv.MoveWindow("Backproject", , ) # Create the slider controls for saturation, value and threshold
cv.CreateTrackbar("Saturation", "Parameters", self.smin, , self.set_smin)
cv.CreateTrackbar("Min Value", "Parameters", self.vmin, , self.set_vmin)
cv.CreateTrackbar("Max Value", "Parameters", self.vmax, , self.set_vmax)
cv.CreateTrackbar("Threshold", "Parameters", self.threshold, , self.set_threshold) # Initialize a number of variables
self.hist = None
self.track_window = None
self.show_backproj = False # These are the callbacks for the slider controls
def set_smin(self, pos):
self.smin = pos def set_vmin(self, pos):
self.vmin = pos def set_vmax(self, pos):
self.vmax = pos def set_threshold(self, pos):
self.threshold = pos # The main processing function computes the histogram and backprojection
def process_image(self, cv_image):
try:
# First blur the image
frame = cv2.blur(cv_image, (, )) # Convert from RGB to HSV space
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV) # Create a mask using the current saturation and value parameters
mask = cv2.inRange(hsv, np.array((., self.smin, self.vmin)), np.array((., ., self.vmax))) # If the user is making a selection with the mouse,
# calculate a new histogram to track
if self.selection is not None:
x0, y0, w, h = self.selection
x1 = x0 + w
y1 = y0 + h
self.track_window = (x0, y0, x1, y1)
hsv_roi = hsv[y0:y1, x0:x1]
mask_roi = mask[y0:y1, x0:x1]
self.hist = cv2.calcHist( [hsv_roi], [], mask_roi, [], [, ] )
cv2.normalize(self.hist, self.hist, , , cv2.NORM_MINMAX);
self.hist = self.hist.reshape(-)
self.show_hist() if self.detect_box is not None:
self.selection = None # If we have a histogram, track it with CamShift
if self.hist is not None:
# Compute the backprojection from the histogram
backproject = cv2.calcBackProject([hsv], [], self.hist, [, ], ) # Mask the backprojection with the mask created earlier
backproject &= mask # Threshold the backprojection
ret, backproject = cv2.threshold(backproject, self.threshold, , cv.CV_THRESH_TOZERO) x, y, w, h = self.track_window
if self.track_window is None or w <= or h <=:
self.track_window = , , self.frame_width - , self.frame_height - # Set the criteria for the CamShift algorithm
term_crit = ( cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, , ) # Run the CamShift algorithm
self.track_box, self.track_window = cv2.CamShift(backproject, self.track_window, term_crit) # Display the resulting backprojection
cv2.imshow("Backproject", backproject)
except:
pass return cv_image def show_hist(self):
bin_count = self.hist.shape[]
bin_w =
img = np.zeros((, bin_count*bin_w, ), np.uint8)
for i in xrange(bin_count):
h = int(self.hist[i])
cv2.rectangle(img, (i*bin_w+, ), ((i+)*bin_w-, -h), (int(180.0*i/bin_count), , ), -)
img = cv2.cvtColor(img, cv2.COLOR_HSV2BGR)
cv2.imshow('Histogram', img) def hue_histogram_as_image(self, hist):
""" Returns a nice representation of a hue histogram """
histimg_hsv = cv.CreateImage((, ), , ) mybins = cv.CloneMatND(hist.bins)
cv.Log(mybins, mybins)
(_, hi, _, _) = cv.MinMaxLoc(mybins)
cv.ConvertScale(mybins, mybins, . / hi) w,h = cv.GetSize(histimg_hsv)
hdims = cv.GetDims(mybins)[]
for x in range(w):
xh = ( * x) / (w - ) # hue sweeps from - across the image
val = int(mybins[int(hdims * x / w)] * h / )
cv2.rectangle(histimg_hsv, (x, ), (x, h-val), (xh,,), -)
cv2.rectangle(histimg_hsv, (x, h-val), (x, h), (xh,,), -) histimg = cv2.cvtColor(histimg_hsv, cv.CV_HSV2BGR) return histimg if __name__ == '__main__':
try:
node_name = "camshift"
CamShiftNode(node_name)
try:
rospy.init_node(node_name)
except:
pass
rospy.spin()
except KeyboardInterrupt:
print "Shutting down vision node."
cv.DestroyAllWindows()
颜色追踪块CamShift---33的更多相关文章
- SPOJ 16549 - QTREE6 - Query on a tree VI 「一种维护树上颜色连通块的操作」
题意 有操作 $0$ $u$:询问有多少个节点 $v$ 满足路径 $u$ 到 $v$ 上所有节点(包括)都拥有相同的颜色$1$ $u$:翻转 $u$ 的颜色 题解 直接用一个 $LCT$ 去暴力删边连 ...
- SP16549 QTREE6 - Query on a tree VI LCT维护颜色联通块
\(\color{#0066ff}{ 题目描述 }\) 给你一棵n个点的树,编号1~n.每个点可以是黑色,可以是白色.初始时所有点都是黑色.下面有两种操作请你操作给我们看: 0 u:询问有多少个节点v ...
- bzoj2906 颜色 分块+块大小分析
题目传送门 https://lydsy.com/JudgeOnline/problem.php?id=2906 题解 如果可以离线的话,那么这个题目就是一个莫队的裸题. 看上去这个数据范围也还会一个根 ...
- OpenGL学习进程(11)第八课:颜色绘制的详解
本节是OpenGL学习的第八个课时,下面将详细介绍OpenGL的颜色模式,颜色混合以及抗锯齿. (1)颜色模式: OpenGL支持两种颜色模式:一种是RGBA,一种是颜色索引模式. R ...
- iOS 中实现随机颜色
开发中为了测试能够快速看到效果很多时候我们对颜色采用随机颜色 代码块如下 UIColor * randomColor= [UIColor colorWithRed:((float)arc4random ...
- Sass函数--颜色函数--HSL函数
HSL函数简介HSL颜色函数包括哪些具体的函数,所起的作用是什么: hsl($hue,$saturation,$lightness):通过色相(hue).饱和度(saturation)和亮度(ligh ...
- printf 字体颜色打印
为了给printf着色方便, 我们可以定义一些宏: view plain copy to clipboard print ? #define NONE "/033[m&qu ...
- 2-4 Sass的函数功能-颜色函数
RGB颜色函数-RGB()颜色函数 在 Sass 的官方文档中,列出了 Sass 的颜色函数清单,从大的方面主要分为 RGB , HSL 和 Opacity 三大函数,当然其还包括一些其他的颜色函数, ...
- python----模块知识拓展
1.hashlib ------configpraser-------- xml hashlib 模块导入:import hashlib 模块说明:用于将信息加密,明文变成密文 功能说明 MD5算法 ...
随机推荐
- windows-docker开发我常用命令 docker-machine ssh default
docker-machine ssh default docker logs test sudo systemctl start docker docker tag IMAGEID ne ...
- Java注解配置
Java注解是附加在代码中的一些元信息,用于一些工具在编译.运行时进行解析和使用,起到说明.配置的功能.注解不会也不能影响代码的实际逻辑,仅仅起到辅助性的作用.包含在 java.lang.annota ...
- IOS弹出视图 LewPopupViewController
LewPopupViewController是一款IOS弹出视图软件.iOS 下的弹出视图.支持iPhone/iPad. 软件截图 使用方法 弹出视图 1 2 3 4 5 PopupView *vie ...
- iOS多线程之GCD学习笔记
什么是GCD 1.全称是Grand Central Dispatch,可译为“牛逼的中枢调度器” 2.纯C语言,提供了非常多强大的函数 GCD的优势 GCD是苹果公司为多核的并行运算提出的解决方案 G ...
- iOS NSDictionary、NSData、JSON数据类型相互转换
iOS经常需要用到数据类型的转换,下面列举一下常用类型的转换. 1.NSDictionary类型转换为NSData类型: //NSDictionary -> NSData: NSDictiona ...
- 修改主机名Ubuntu
主机名存放在/etc/hostname 修改保存即可
- phpstom 实用laravel 需要附加的 命令
首先利用composer 下载相关的插件 在根目录执行此代码 composer require barryvdh/laravel-ide-helper 再者在config/app.php 添加一条命令 ...
- 作业5-需求分析(EX:南通大学成绩录入系统)
产品利益相关者: 用户:南通大学各任课老师. 顾客:南通大学(教务处) 工程师:系统的开发,测试,维护,推广人员等 竞争性需求分析: N(需求) A(做法) B(好处) C(竞争) D(推广) 基础性 ...
- context理解
官方文档的解释是:Context提供了关于应用环境全局信息的接口.它是一个抽象类,它的执行被Android系统所提供.它允许获取以应用为特征的资源和类型.同时启动应用级的操作,如启动Activity, ...
- iOS开发 获取手机信息(UIDevice,NSBundle,NSlocale)
在开发中,需要获取当前设备的一些信息,可以通过UIDevice,NSbundle,NSlocale获取. UIDevice UIDevice 提供了多种属性,类函数及状态通知,可以检测手机电量,定位, ...