Autoware(1)——快速开始
该部分可参照github Autoware中的 Demo Quick_Start。
1. 建立目录“.autoware”来保存demo数据
mkdir .autoware
2. 下载Demo数据下载demo数据:
A script for generating a demo launch file:
http://db3.ertl.jp/autoware/sample_data/my_launch.sh
Map/calibration/path data (Moriyama area):
http://db3.ertl.jp/autoware/sample_data/sample_moriyama_data.tar.gz
rosbag data:
http://db3.ertl.jp/autoware/sample_data/sample_moriyama_150324.tar.gz
将下载的压缩包转到~/.autoware解压
~$ cd .autoware
~/.autoware$ tar xfz sample_moriyama_data.tar.gz
~/.autoware$ tar xfz sample_moriyama_150324.tar.gz~/.autoware$ sh my_launch.sh
运行命令后会生成以下的launch文件:
my_launch/
my_map.launch # Load PointClouds and vector maps
my_sensing.launch # Load device drivers
my_localization.launch # Localozation
my_detection.launch # Object detection
my_mission_planning.launch # Path planning
my_motion_planning.launch # Path following
3. 运行runtime manager
cd ~/Autoware/ros
./run
会出现两个分离的终端窗口。一个是[roscore],另一个是[runtime_manager] ,Runtime Manager启动前要输入管理员密码,输入密码后就可以启动了。
如出现输入密码后无Runtime Manager窗口,应该是Autoware安装有问题,可能是未执行:
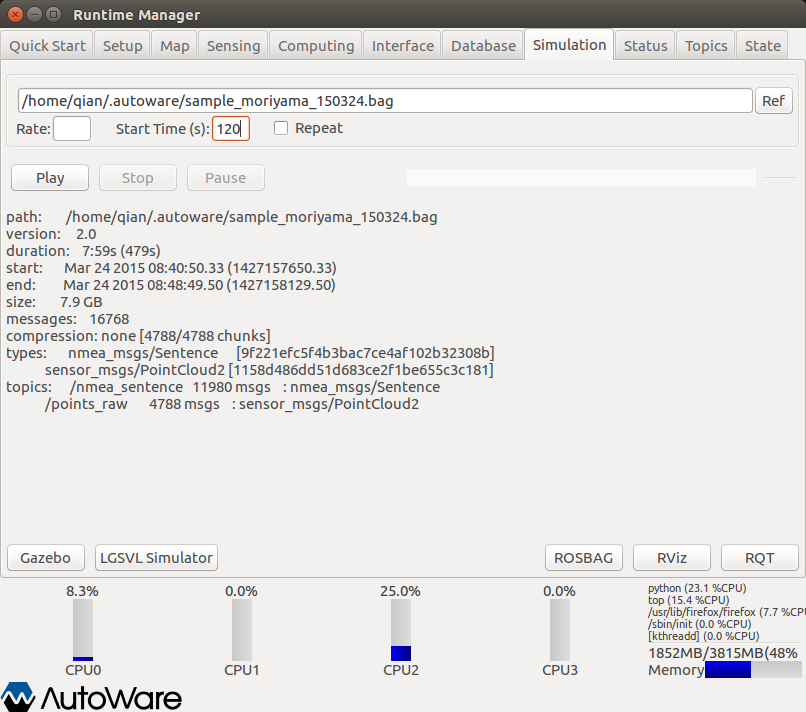
4. 运行rosbag
在Runtime Manager的simulation界面中,导入”sample_moriyama_150324.bag”,设置开始时间为120,然后点击play,再点击pause按钮。
加载点云图和向量图
在[quick start]界面,选择map,ref加载my_map.launch,并且点击[map]按钮。
“~/.autoware/data/my_launch/my_map.launch”
定位
在[quick start]界面,加载my_localization.launch,并且点击[localization]按钮。
“~/.autoware/my_launch/my_localization.launch”
启动RViz
点击RViz按钮启动Rviz可视化工具。启动后选择[file]-[open config],在[choose a file to open]对话框中,选择以下文件,然后点击[open]。
“~/Autoware/ros/src/.config/rviz/default.rviz”
在[simulation]界面,点击[pause]按钮来重新运行rosbag。
在Rviz中的 [Display]窗口, [Global Options]-[Fixed Frame] , 设置为 “world”.
在 [Current View]-[Target Frame]的 [View] 窗口, 选择“base_link” 并且设置[Type]为“TopDownOrtho”。点击 [Zero] 按钮. (可以初始化追踪汽车的位置)。
当simulation界面的进度条到达23%左右(110/479sec),演示应该趋向于稳定了。
8.任务规划
在[quick start]界面,加载my_mission_planning.launch,并且点击[mission planning]按钮。
“~/.autoware/my_launch/my_mission_planning.launch”
9.运动规划
在[quick start]界面,加载my_motion_planning.launch,并且点击[motion planning]按钮。
“~/.autoware/my_launch/my_motion_planning.launch”
Autoware(1)——快速开始的更多相关文章
- 快速构建H5单页面切换骨架
在Web App和Hybrid App横行的时代,为了拥有更好的用户体验,单页面应用顺势而生,单页面应用简称`SPA`,即Single Page Application,就是只有一个HTML页面的应用 ...
- .net core快速上手
2014年11月12日的Connect ();开发者活动上宣布将.NET堆栈基于MIT协议开源,并且提供开源保证,托管在Github上.当时的版本与最终目标相距甚远,然而有一点可以肯定的是,这是一个与 ...
- Web Api 入门实战 (快速入门+工具使用+不依赖IIS)
平台之大势何人能挡? 带着你的Net飞奔吧!:http://www.cnblogs.com/dunitian/p/4822808.html 屁话我也就不多说了,什么简介的也省了,直接简单概括+demo ...
- SignalR快速入门 ~ 仿QQ即时聊天,消息推送,单聊,群聊,多群公聊(基础=》提升)
SignalR快速入门 ~ 仿QQ即时聊天,消息推送,单聊,群聊,多群公聊(基础=>提升,5个Demo贯彻全篇,感兴趣的玩才是真的学) 官方demo:http://www.asp.net/si ...
- 快速搭建springmvc+spring data jpa工程
一.前言 这里简单讲述一下如何快速使用springmvc和spring data jpa搭建后台开发工程,并提供了一个简单的demo作为参考. 二.创建maven工程 http://www.cnblo ...
- 如何快速优化手游性能问题?从UGUI优化说起
WeTest 导读 本文作者从自身多年的Unity项目UI开发及优化的经验出发,从UGUI,CPU,GPU以及unity特有资源等几个维度,介绍了unity手游性能优化的一些方法. 在之前的文 ...
- Photoshop将普通照片快速制作二次元漫画风格效果
今天为大家分享Photoshop将普通照片快速制作二次元漫画风格效果,教程很不错,对于喜欢漫画的朋友可以参考本文,希望能对大家有所帮助! 一提到日本动画电影,大家第一印象肯定是宫崎骏,但是日本除了宫崎 ...
- CRL快速开发框架系列教程十三(嵌套查询)
本系列目录 CRL快速开发框架系列教程一(Code First数据表不需再关心) CRL快速开发框架系列教程二(基于Lambda表达式查询) CRL快速开发框架系列教程三(更新数据) CRL快速开发框 ...
- CRL快速开发框架系列教程十二(MongoDB支持)
本系列目录 CRL快速开发框架系列教程一(Code First数据表不需再关心) CRL快速开发框架系列教程二(基于Lambda表达式查询) CRL快速开发框架系列教程三(更新数据) CRL快速开发框 ...
随机推荐
- 深度学习(九) 深度学习最全优化方法总结比较(SGD,Momentum,Nesterov Momentum,Adagrad,Adadelta,RMSprop,Adam)
前言 这里讨论的优化问题指的是,给定目标函数f(x),我们需要找到一组参数x(权重),使得f(x)的值最小. 本文以下内容假设读者已经了解机器学习基本知识,和梯度下降的原理. SGD SGD指stoc ...
- leetcode — valid-palindrome
/** * Source : https://oj.leetcode.com/problems/valid-palindrome/ * * * Given a string, determine if ...
- 基于 Nginx 的 HTTPS 性能优化
前言 分享一个卓见云的较多客户遇到HTTPS优化案例. 随着相关浏览器对HTTP协议的“不安全”.红色页面警告等严格措施的出台,以及向 iOS 应用的 ATS 要求和微信.支付宝小程序强制 HTTPS ...
- Jenkins持续集成01—Jenkins服务搭建和部署
一.介绍Jenkins 1.Jenkins概念 Jenkins是一个功能强大的应用程序,允许持续集成和持续交付项目,无论用的是什么平台.这是一个免费的源代码,可以处理任何类型的构建或持续集成.集成Je ...
- [四]基础数据概述之Byte详解
Byte 基本数据类型byte 的包装类 Byte 类型的对象包含一个 byte类型的字段 属性简介 构造方法 Byte的构造方法也是有两种 可以通过基本类型byt ...
- springboot情操陶冶-jmx解析
承接前文springboot情操陶冶-@Configuration注解解析,近期笔者接触的项目中有使用到了jmx的协议框架,遂在前文的基础上讲解下springboot中是如何整合jmx的 知识储备 J ...
- 线程的私有领地 ThreadLocal
从名字上看,『ThreadLocal』可能会给你一种本地线程的概念印象,可能会让你联想到它是一个特殊的线程. 但实际上,『ThreadLocal』却营造了一种「线程本地变量」的概念,也就是说,同一个变 ...
- [HEOI2018] 秘密袭击coat
Description 给定一棵 \(n\) 个点的树,每个点有点权 \(d_i\) ,请对于树上所有大于等于 \(k\) 个点的联通块,求出联通块中第 \(k\) 大的点权之和.\(n\le 166 ...
- Fiddler无法正常抓取谷歌等浏览器的请求_解决方案
1-先了解Fiddler工作原理: 正常情况下,fiddler是可以抓chrome的请求的. fiddler会自动给浏览器设置一个代理127.0.0.1端口8888,并且记忆浏览器的代理设置,所有的请 ...
- Java的几道面试题目以及简短回答做个记录保存
最近没有继续用CSDN写博客了,转到博客园,什么时候自己搭建一个博客就好了. 一 谈谈你对Spring的工作原理的理解 引用一篇博客的讲解,https://www.cnblogs.com/xdp- ...