elmo驱动器使用EAS II配置教程
一、驱动器接线
1.1驱动器接口:
驱动器接线,需要连接两个接口,一个是反馈接口,一个是STO接口。
反馈接口,我这里使用了elmo驱动器的Port A。这个接口提供5v电源。并且可以输入旋转编码器和霍尔传感器。接口定义如下。其中2口为GND。

图1 Port A接口定义
STO接口的1、2两个口接5V或24V,我接了24V。3口接GND。
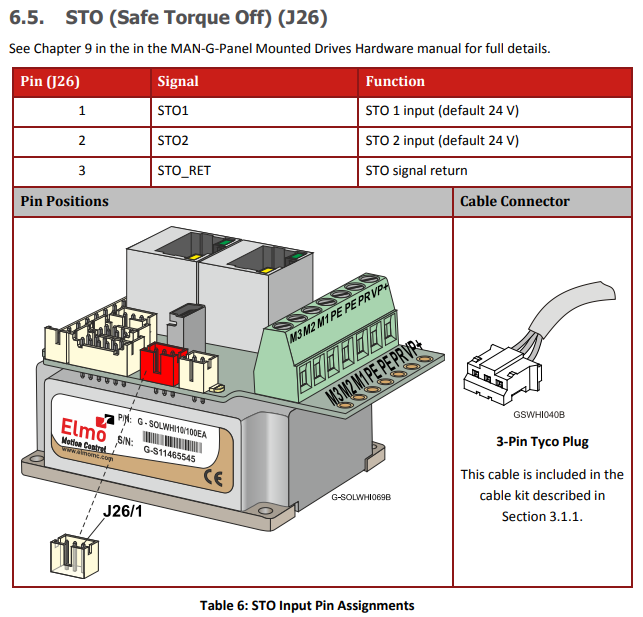
图2 STO接口定义
1.2电机接口
电机型号为maxton 470469
电机线:Motor winding 1/2/3对应
编码器线:
图3电机线上1-9根,从左到右分别为图4编码器接口定义的2-10。
图3电机线上10-14根,从左到右分别为图5霍尔传感器定义的1-5。
根据电机线定义和Elmo接口重新接线。
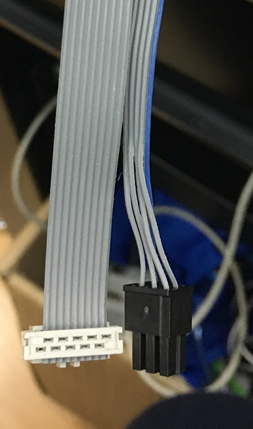
图3 电机线
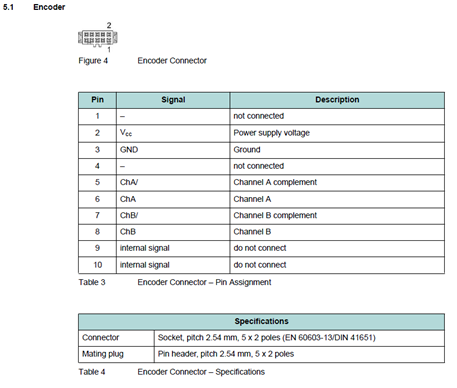
图4 编码器接口定义
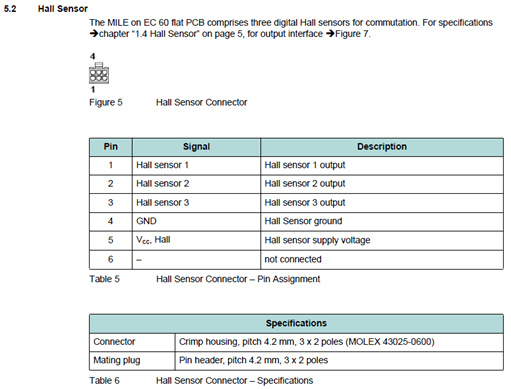
图5 霍尔传感器接口定义
二、驱动器配置 EAS II
这里使用的EAS II驱动器安装包为Elmo+Application+Studio+II+Setup+2.3.1.4.exe。
官网下载比较复杂,这里提供一个百度云盘下载地址:链接: https://pan.baidu.com/s/1nwJMQiX 密码: fjvf
2.1驱动器连接
第一步,驱动器接线完成后,接通elmo的24V电源,将elmo通过mini-usb连接到电脑usb口,自动搜索安装串口驱动。若失败,可通过备份的驱动添加。
备份驱动下载地址:链接: https://pan.baidu.com/s/1b_goLhu_GmLBm4kK9aanUw 密码: j8jq
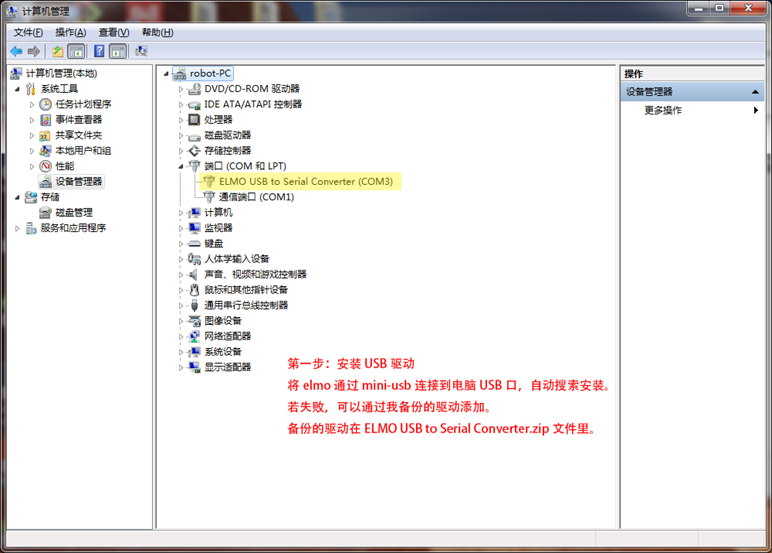
驱动安装完成后,使用EAS II连接驱动器。按照图片中的指示操作。
第二步:添加驱动器到工作空间。在工作空间右键,选择Add Gold Driver。

新建驱动器(Driver03)如图所示,前面两个为之前新建过的。

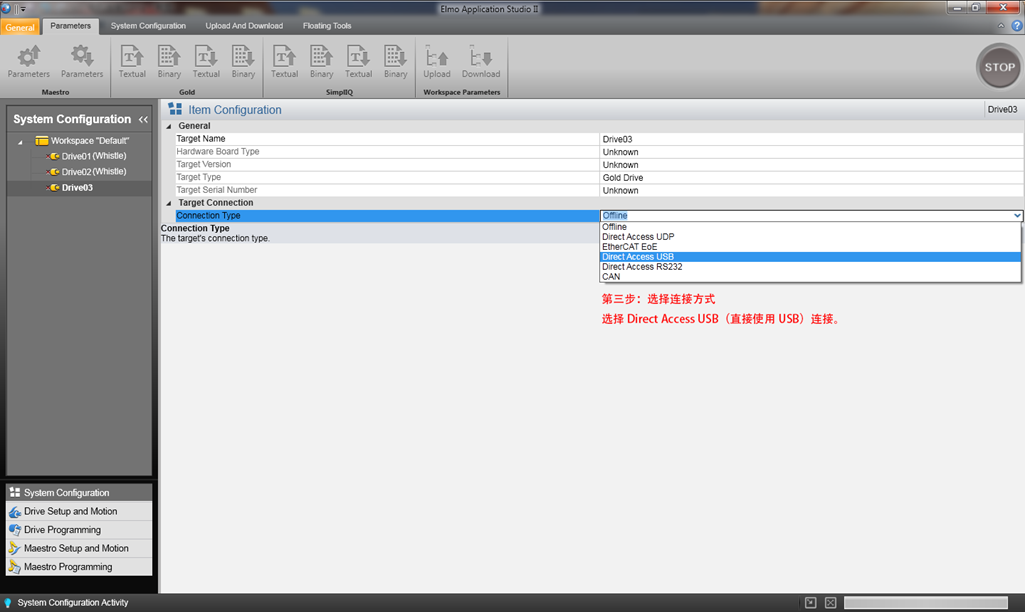
第三步:在Driver03里,选择目标连接方式,选择Direct Access USB(直接使用USB)连接。
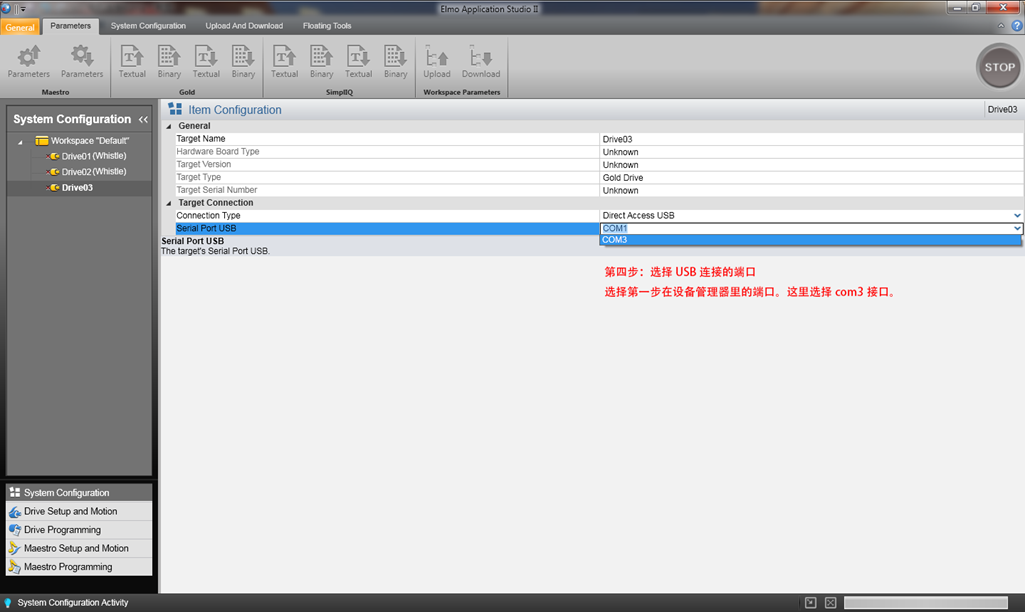
第四步:选择USB连接的端口。选择第一步在设备管理器里的端口,这里选择com3接口。
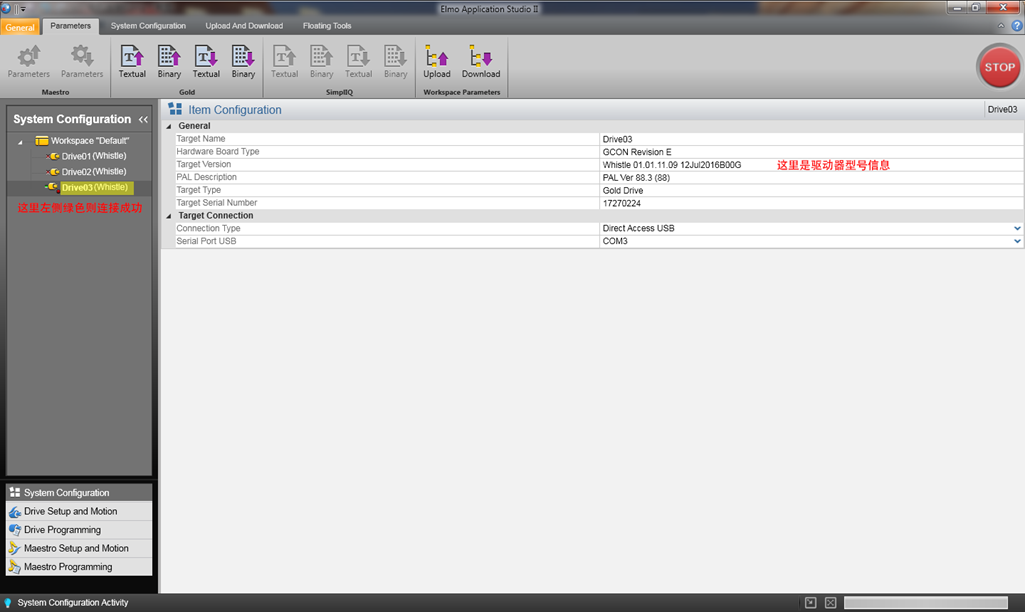
第五步:连接驱动器。在右侧系统设置的工作区里,邮件Driver03,选择connect。

Driver03左侧绿色则表示连接成功,同时可以在右侧看到驱动器型号信息。
2.2电机配置
电机参数如下
减速箱参数:

电机参数:
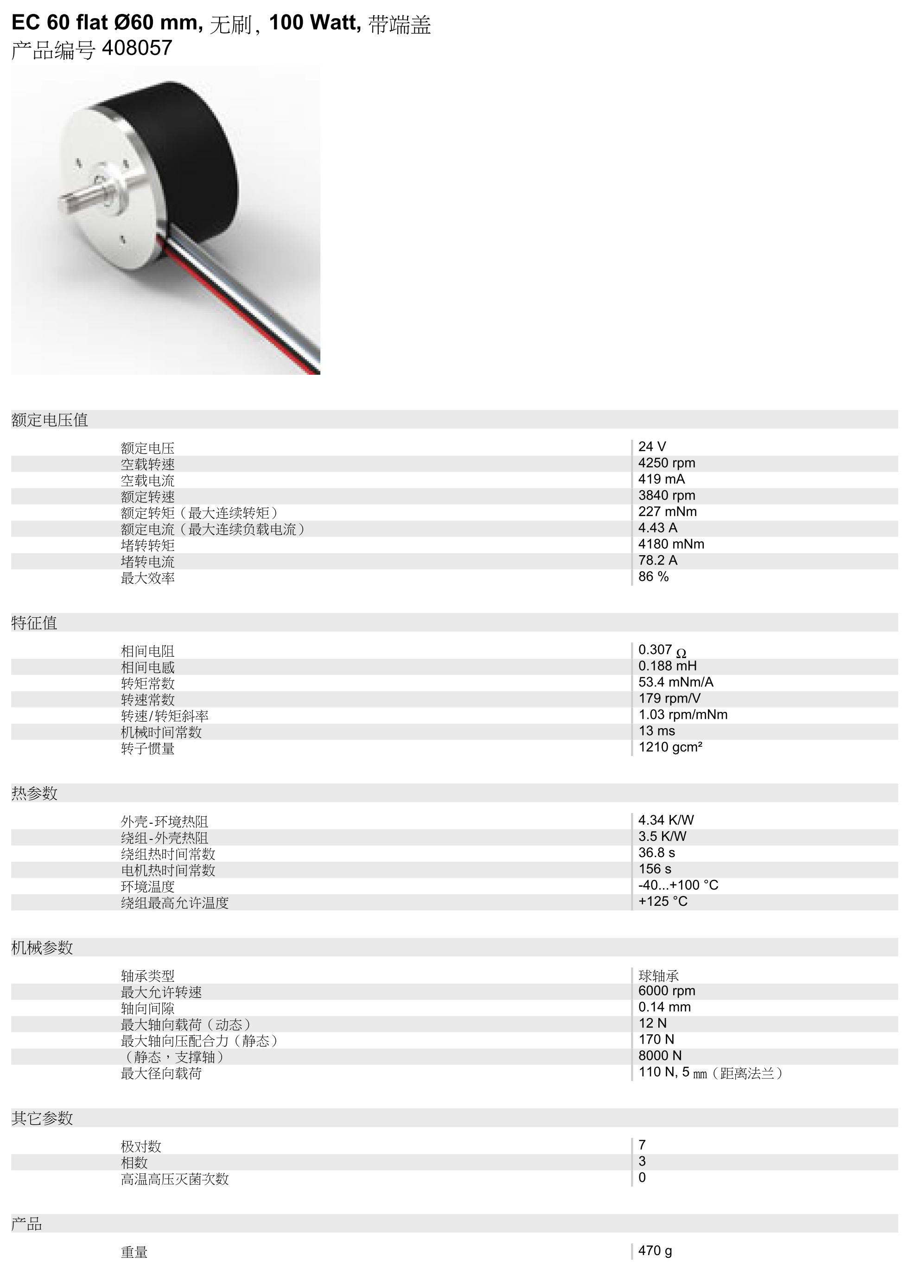
编码器参数:

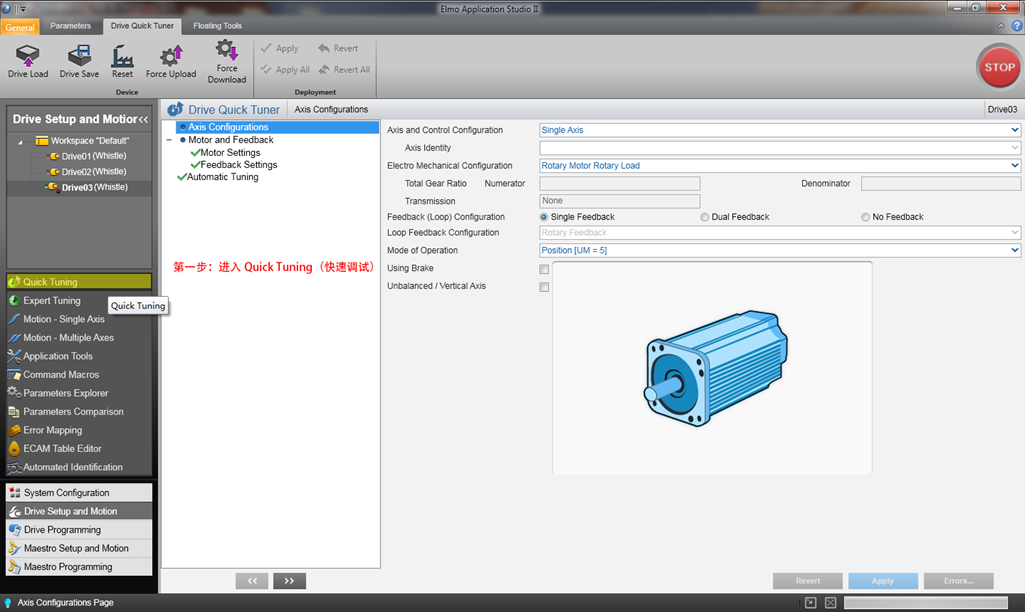
电机连接成功后,进入Driver Setup and Motion界面。配置驱动器参数。

第一步:进入Quick Tuning
第二步:配置电机参数。配置之后记得apply。根据图片中的内容填入,在这里,Peak Current应大于等于Continuous Stall Current。Continuous Stall Current这个具体的中文意思我翻译的有问题。

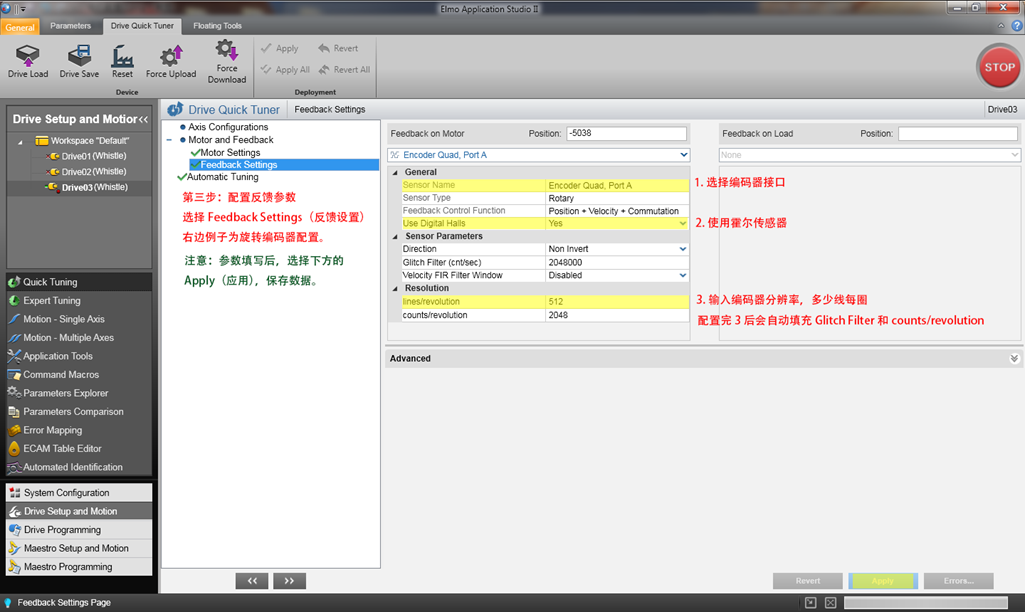
第三步:配置反馈参数,具体参考图片。
Lines/revolution是编码器旋转一周线数。Counts/revolution是旋转一周计数,包括a/b两个通道的上升沿和下降沿。Gitch Filter是最大转速时每秒钟计数,包括a/b两个通道的上升沿和下降沿。
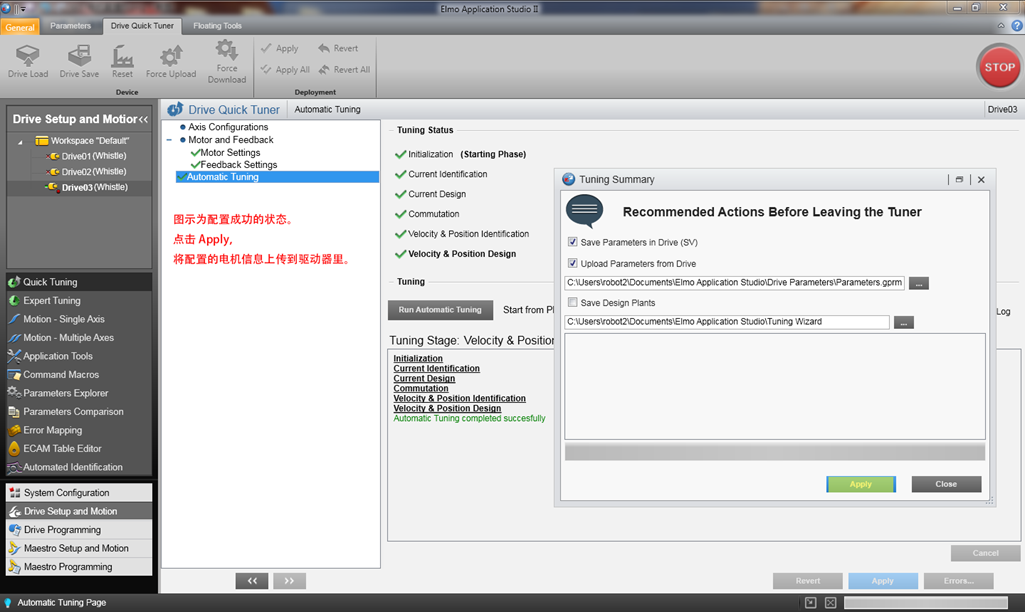
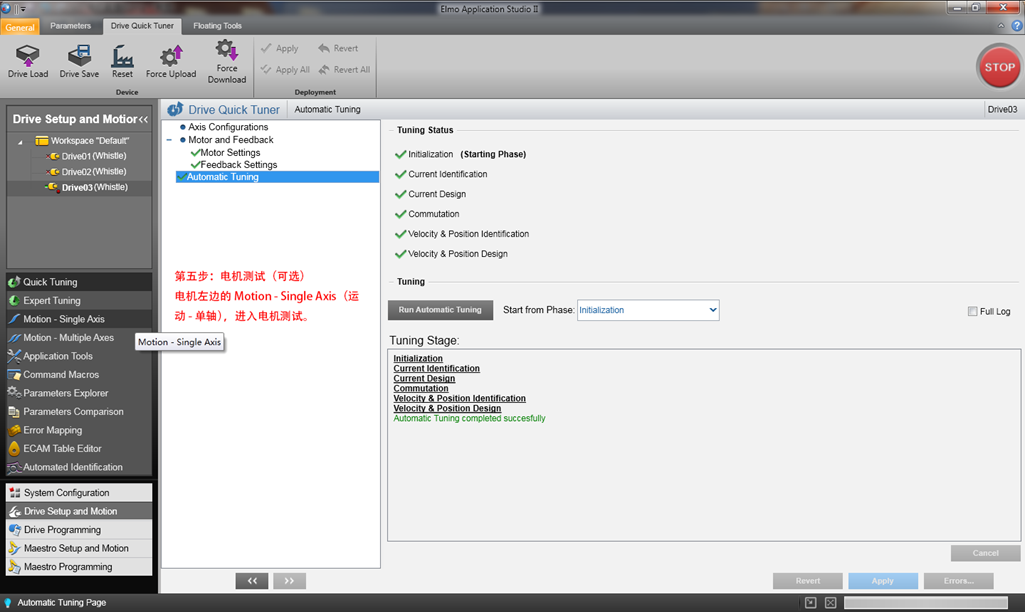
第四步:进行自动调试。自动调试时电机会转动,这里我测试到的电机小幅度移动是因为减速箱减速比大,而我只观察了经过减速的电机转轴,电机的实际转动超过一圈。

配置成功后如下图所示。
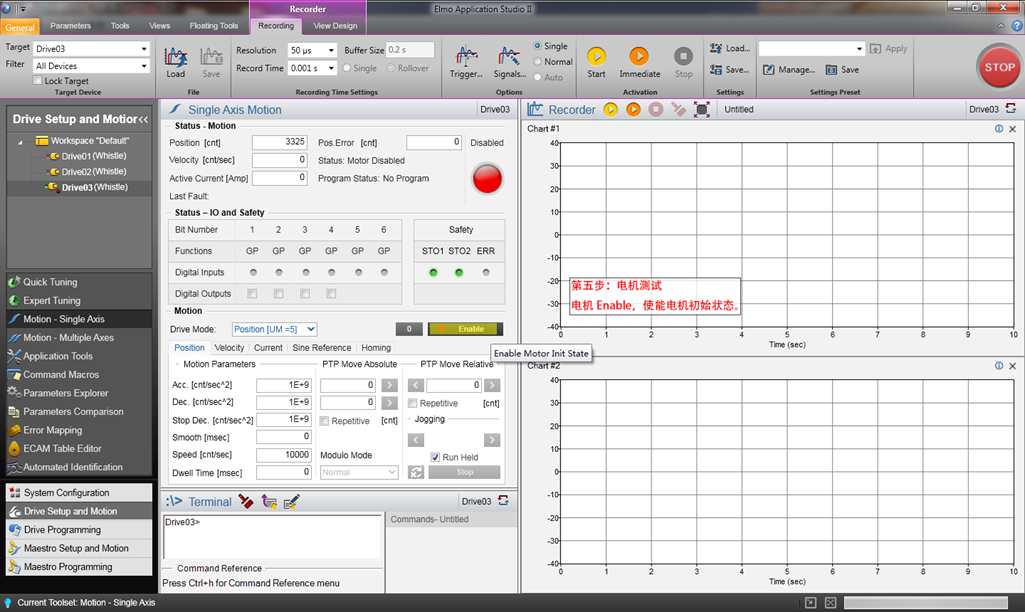
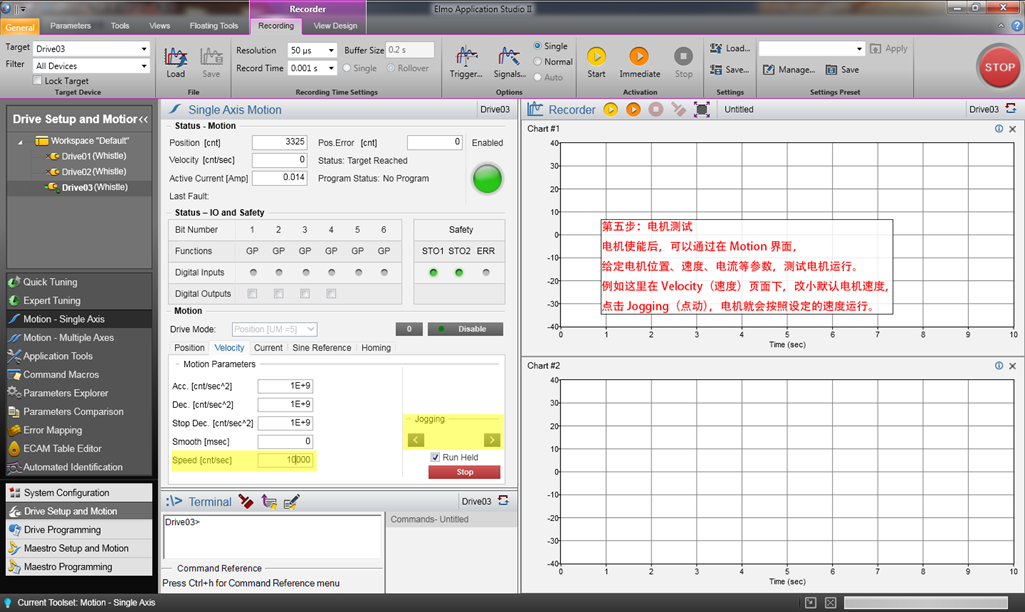
2.3(可选)电机测试
配置成功后可在EAS里直接控制电机转动,进行测试。
链接: https://pan.baidu.com/s/1b_goLhu_GmLBm4kK9aanUw 密码: j8jq
elmo驱动器使用EAS II配置教程的更多相关文章
- openvpn配置教程
openvpn配置教程 本文是为解决本地服器能从外网访问web页,从新改写(临摹) 烂泥:ubuntu 14.04搭建OpenVPN服务器这篇文章 腾讯云为服务器,本地服务器为客户端 一.服务器安装o ...
- VMware Workstation虚拟机中的Linux通过NAT模式共享上网配置教程
VMware Workstation虚拟机中的Linux通过NAT模式共享上网配置教程 在VMware Workstation虚拟机下面,Linux虚机要上网,一般是桥接模式,但我自己的电脑上网的环境 ...
- 百度在线编辑器UEditor(v1.3.6) .net环境下详细配置教程之更改图片和附件上传路径
本文是接上一篇博客,如果有疑问请先阅读上一篇:百度在线编辑器UEditor(v1.3.6) .net环境下详细配置教程 默认UEditor上传图片的路径是,编辑器包目录里面的net目录下 下面就演示如 ...
- 百度在线编辑器UEditor(v1.3.6) .net环境下详细配置教程
UEditor是百度开发团队奉献的一款很不错的在线编辑器.在百度自己很多产品上都有应用,本文主要是该编辑器的配置教程. 1.下载UEditor,当前最新版本是1.3.6.这里下载的.net版本,选择U ...
- OpenGL 4.3配置教程
OpenGL 4.3配置教程 下载开发包 需要下载的开发包主要包含如下几个组件:freeglut+glew+ OpenGL.Development.Cookbook+源码+GLM+SOIL. Open ...
- Hadoop集群安装配置教程_Hadoop2.6.0_Ubuntu/CentOS
摘自:http://www.powerxing.com/install-hadoop-cluster/ 本教程讲述如何配置 Hadoop 集群,默认读者已经掌握了 Hadoop 的单机伪分布式配置,否 ...
- PHP调试工具Xdebug安装配置教程
说道PHP代码调试,对于有经验的PHPer,通过echo.print_r.var_dump函数,或PHP开发工具zend studio.editplus可解决大部分问题,但是对于PHP入门学习的童鞋来 ...
- Python学习 1 一 Python2.75的安装及环境配置教程
Python2.75的安装及环境配置教程 Python的语法简洁,功能强大,有大量的第三方开发包(模块),非常适合初学者上手.同时Python不像java一样对内存要求非常高,适合做一些经常性的任务方 ...
- 阿里云ECS专有网络产品三个步骤配置教程
阿里云ECS专有网络产品三个步骤配置教程 阿里云专有网络节点已开通地域:美国硅谷可用区1B,新加坡可用区A,北京可用区A,深圳可用区A,杭州可用区D,上海可用区B 举个栗子:购买 美国硅谷可用区1B ...
随机推荐
- MFC学习之对话框---对话框之间的domodle 数据传递
if(IDOK==data.DoModal()){tx->m_gao=data.m_he;tx->m_kuan=data.m_wi;tx->m_jiao=data.m_jiaoju; ...
- spring2实现定时任务的一种方式
1. 在项目中放入Spring的jar包 2. applicationContext.xml的<beans xmlns>部分,添加context相关内容: <beans xmlns= ...
- 更改UISearchBar button属性
//点击搜索框时触发 - (BOOL)searchBarShouldBeginEditing:(UISearchBar *)searchBar { self.theSearchUserSearchBa ...
- 阿里 JAVA 开发手册 学习 4 工程规约
应用分层 1.分层如下 1)开放接口层:可以直接封装Service接口暴露成RPC:通过web封装成http接口:网关控制层等. 2)终端显示层:各个端的模板渲染并执行显示层. 3)Web层:主要是度 ...
- NOIP考前感悟
闭关这么久,后来突然后悔自己前几天和暑假的状态很頽 不然进步也还能多一点吧 还好提前发现了,最后也还是努力了一把 也算不枉费自己的选择吧 从初中开始学习OI,到头来也没有什么成果 但还好自己高一 也还 ...
- 【C语言天天练(十九)】restrict关键词
引言:在内核的系统调用函数里,常常遇到函数的參数使用restrict限定词限定的情况,以下就对该关键词做个总结. 1.restrict关键词是C99特性才加入的,因此在编译使用含有该限定词的程序时,一 ...
- java基础以及操作Excle
今天把会经常用的几个集合的迭代方法又练习了一下,放在这里,经常复习! map集合迭代 /*** 迭代map[1]*/ for (Integer key : map.keySet()) {//迭代key ...
- sqlserver锁表查看
sp_lock--查询哪个进程锁表了,spid:进程ID,ObjId:对象ID EXEC sp_executesql N'KILL [spid]'--杀进程 select object_name([O ...
- 转:Windows下WSH/JS实现SVN服务器钩子脚本阻止提交空日志信息和垃圾文件
http://blog.csdn.net/caikanxp/article/details/8279921 如何强制用户在提交SVN时填写日志信息? 如果用户使用的都是TortoiseSVN客户端,可 ...
- github如何提交自己修改的代码
当在github上发现别人项目有BUG,或者想要完善其功能的时候,该如何把自己的修改提交到项目中呢? 以logback为例 步骤: 1, fork一份logback代码到自己的仓库 进入github要 ...