基于FDC2214的手势识别
基于FDC2214的手势识别
1、本次题目来源于2018年全国电子设计大赛D题,要求实现对石头、剪刀、布以及数字12345的识别;同时在上述基础上实现对手势的学习。
2、硬件实现:
硬件主要采用STM32F103以及TI公司的FDC2214芯片,同时FDC2214芯片按照官方文档进行接线,其接线原理图如下:
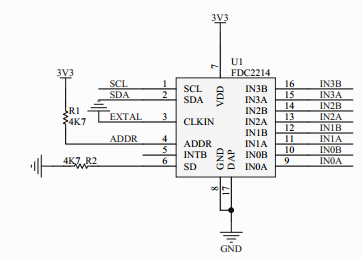
其中CLKIN引脚为接地引脚;ADDR引脚需要外接上拉电阻;SD引脚需要外接下拉电阻;右侧为芯片外接测量数据输入端口。
同时SCL、SDA、VDD以及GND进行了接线处理,其具体接线如下:
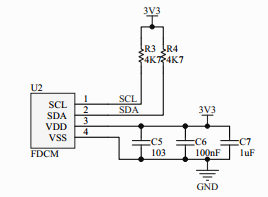
实现对接线的VDD和GND之间的处理,实现和STM32f103之间的连接,实现对FDC2214芯片的供电和接地处理以及I2C通信的接口。
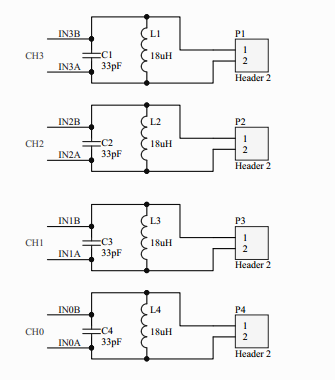
另外,对数据输入端子进行数据读入,加入LC稳定滤波,其接线原理如下:
3、软件实现,不多说,先贴上FDC2214配置代码:
#include "fdc2214.h"
#include "delay.h"
#include "led.h"
void FDC_IIC_Delay(void)
{
delay_us(2);
}
void FDC_GPIO_Init(void)
{
}
void FDC_IIC_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4|GPIO_Pin_5;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIO_SetBits(GPIOC,GPIO_Pin_4|GPIO_Pin_5);
}
void FDC_IIC_Start(void)
{
FDC_SDA_OUT();
FDC_IIC_SDA=1;
FDC_IIC_SCL=1;
FDC_IIC_Delay();
FDC_IIC_SDA=0;
FDC_IIC_Delay();
FDC_IIC_SCL=0;
}
void FDC_IIC_Stop(void)
{
FDC_SDA_OUT();
FDC_IIC_SCL=0;
FDC_IIC_SDA=0;
FDC_IIC_Delay();
FDC_IIC_SCL=1;
FDC_IIC_SDA=1;
FDC_IIC_Delay();
}
u8 FDC_IIC_Wait_Ack(void)
{
u8 ucErrTime=0;
FDC_SDA_IN();
FDC_IIC_SDA=1;FDC_IIC_Delay();
FDC_IIC_SCL=1;FDC_IIC_Delay();
while(FDC_READ_SDA)
{
ucErrTime++;
if(ucErrTime>250)
{
FDC_IIC_Stop();
return 1;
}
}
FDC_IIC_SCL=0;
return 0;
}
void FDC_IIC_Ack(void)
{
FDC_IIC_SCL=0;
FDC_SDA_OUT();
FDC_IIC_SDA=0;
FDC_IIC_Delay();
FDC_IIC_SCL=1;
FDC_IIC_Delay();
FDC_IIC_SCL=0;
}
void FDC_IIC_NAck(void)
{
FDC_IIC_SCL=0;
FDC_SDA_OUT();
FDC_IIC_SDA=1;
FDC_IIC_Delay();
FDC_IIC_SCL=1;
FDC_IIC_Delay();
FDC_IIC_SCL=0;
}
void FDC_IIC_Send_Byte(u8 txd)
{
u8 t;
FDC_SDA_OUT();
FDC_IIC_SCL=0;
for(t=0;t<8;t++)
{
FDC_IIC_SDA=(txd&0x80)>>7;
txd<<=1;
FDC_IIC_SCL=1;
FDC_IIC_Delay();
FDC_IIC_SCL=0;
FDC_IIC_Delay();
}
}
u8 FDC_IIC_Read_Byte(unsigned char ack)
{
unsigned char i,receive=0;
FDC_SDA_IN();
for(i=0;i<8;i++ )
{
FDC_IIC_SCL=0;
FDC_IIC_Delay();
FDC_IIC_SCL=1;
receive<<=1;
if(FDC_READ_SDA)receive++;
FDC_IIC_Delay();
}
if (!ack)
FDC_IIC_NAck();//·¢ËÍnACK
else
FDC_IIC_Ack(); //·¢ËÍACK
return receive;
}
u8 Set_FDC2214(u8 reg,u8 MSB,u8 LSB)
{
FDC_IIC_Start();
FDC_IIC_Send_Byte((FDC2214_ADDR<<1)|0);
if(FDC_IIC_Wait_Ack())
{
FDC_IIC_Stop();
return 1;
}
FDC_IIC_Send_Byte(reg);
FDC_IIC_Wait_Ack();
FDC_IIC_Send_Byte(MSB);
if(FDC_IIC_Wait_Ack())
{
FDC_IIC_Stop();
return 1;
}
FDC_IIC_Send_Byte(LSB);
if(FDC_IIC_Wait_Ack())
{
FDC_IIC_Stop();
return 1;
}
FDC_IIC_Stop();
return 0;
}
u16 FDC_Read(u8 reg)
{
u16 res;
FDC_IIC_Start();
FDC_IIC_Send_Byte((FDC2214_ADDR<<1)|0);
FDC_IIC_Wait_Ack();
FDC_IIC_Send_Byte(reg);
FDC_IIC_Wait_Ack();
FDC_IIC_Start();
FDC_IIC_Send_Byte((FDC2214_ADDR<<1)|1);
FDC_IIC_Wait_Ack();
res=FDC_IIC_Read_Byte(1)<<8;
res|=FDC_IIC_Read_Byte(0);
FDC_IIC_Stop();
return res;
}
u32 FCD2214_ReadCH(u8 index)
{
u32 result;
switch(index)
{
case 0:
result = FDC_Read(DATA_CH0)&0x0FFF;
result = (result<<16)|(FDC_Read(DATA_LSB_CH0));
break;
case 1:
result = FDC_Read(DATA_CH1)&0x0FFF;
result = (result<<16)|(FDC_Read(DATA_LSB_CH1));
break;
case 2:
result = FDC_Read(DATA_CH2)&0x0FFF;
result = (result<<16)|(FDC_Read(DATA_LSB_CH2));
break;
case 3:
result = FDC_Read(DATA_CH3)&0x0FFF;
result = (result<<16)|(FDC_Read(DATA_LSB_CH3));
break;
default:break;
}
result =result&0x0FFFFFFF;
return result;
}
u8 FDC2214_Init(void)
{
u16 res;
FDC_GPIO_Init();
FDC_IIC_Init();
res=FDC_Read(MANUFACTURER_ID);
if(res==0x5449)
{
Set_FDC2214(RCOUNT_CH0,0x34,0xFB); Set_FDC2214(RCOUNT_CH1,0x34,0xFB);
Set_FDC2214(RCOUNT_CH2,0x34,0xFB);
Set_FDC2214(RCOUNT_CH3,0x34,0xFB);
Set_FDC2214(SETTLECOUNT_CH0,0x00,0x1B); Set_FDC2214(SETTLECOUNT_CH1,0x00,0x1B);
Set_FDC2214(SETTLECOUNT_CH2,0x00,0x1B);
Set_FDC2214(SETTLECOUNT_CH3,0x00,0x1B);
Set_FDC2214(CLOCK_DIVIDERS_C_CH0,0x10,0x01); Set_FDC2214(CLOCK_DIVIDERS_C_CH1,0x10,0x01); Set_FDC2214(CLOCK_DIVIDERS_C_CH2,0x10,0x01); Set_FDC2214(CLOCK_DIVIDERS_C_CH3,0x10,0x01);
Set_FDC2214(DRIVE_CURRENT_CH0,0x78,0x00); Set_FDC2214(DRIVE_CURRENT_CH1,0x78,0x00);
Set_FDC2214(DRIVE_CURRENT_CH2,0x78,0x00);
Set_FDC2214(DRIVE_CURRENT_CH3,0x78,0x00);
Set_FDC2214(ERROR_CONFIG,0x00,0x00);
Set_FDC2214(MUX_CONFIG,0xC2,0x0D);
Set_FDC2214(CONFIG,0x14,0x01);
}
else return 1;
return 0;
}
float Cap_Calculate(u8 index)
{
u32 Data_FDC;
Data_FDC = FCD2214_ReadCH(index);
return (Data_FDC);
}
上述为本次设计中较为核心的FDC2214传感器芯片用到的配置代码,其中包括对I2C通信的代码引脚配置、时序配置、数据读入读出、读取FDC2214对应通道数值的程序编写。
4、其中,自学习功能,本人使用每三次采集数据均值周边的正负20作为数据参考基准,,实现对手势的学习,增强自学习性的可以自己编写相关算法程序。
if(page_fl==22&&posi==6)
{
if( (data>n1_data[0]-20)&&(data<n1_data[0]+20) )
{
POINT_COLOR=BLACK;
LCD_ShowNum(190,400,1,1,24);
}
if( (data>n2_data[0]-20)&&(data<n2_data[0]+20) )
{
POINT_COLOR=BLACK;
LCD_ShowNum(190,400,2,1,24);
}
if( (data>n3_data[0]-20)&&(data<n3_data[0]+20) )
{
POINT_COLOR=BLACK;
LCD_ShowNum(190,400,3,1,24);
}
if( (data>n4_data[0]-20)&&(data<n4_data[0]+20) )
{
POINT_COLOR=BLACK;
LCD_ShowNum(190,400,4,1,24);
}
if( (data>n5_data[0]-20)&&(data<n5_data[0]+20) )
{
POINT_COLOR=BLACK;
LCD_ShowNum(190,400,5,1,24);
}
}
5、综上,为本次D题,此外还做了2018年E题方案和程序,有兴趣后续可了解学习,诸多不足,诸位见谅
基于FDC2214的手势识别的更多相关文章
- 基于ssd的手势识别模型(object detection api方式)
[Tensorflow]Object Detection API-训练自己的手势识别模型 1. 安装tensorflow以及下载object detection api 1.安装tensorflow: ...
- 模式识别开发之项目---基于opencv的手势识别
我使用OpenCV2.4.4的windows版本+Qt4.8.3+VS2010的编译器做了一个手势识别的小程序. 本程序主要使到了Opencv的特征训练库和最基本的图像处理的知识,包括肤色检测等等. ...
- 手势识别(一)--手势基本概念和ChaLearn Gesture Challenge
以下转自: http://blog.csdn.net/qq1175421841/article/details/50312565 像点击(clicks)是GUI平台的核心,轻点(taps)是触摸平台的 ...
- Kinect 开发 —— 手势识别(上)
像点击(clicks)是GUI平台的核心,轻点(taps)是触摸平台的核心那样,手势(gestures)是Kinect应用程序的核心 关于手势的定义的中心在于手势能够用来交流,手势的意义在于讲述而不是 ...
- [转帖]gesture recognition
http://wenku.baidu.com/view/53c3331a6bd97f192279e9c9.html HSI与RGB的Matlab实现. http://wenku.baidu.com/v ...
- 时序分析:HMM模型(状态空间)
关于HMM模型:时序分析:隐马尔科夫模型 HMM用于手势识别: 训练时每一种手势对应一个HMM-Model,识别率取最大的一个HMM即可. 类似于一个封装的完成多类识别器功能单层网络. 优点: 尤其 ...
- OpenCV(Open Source Computer Vision Library)计算机视觉库
OpenCV(最基本的滤波到高级的物体检测皆有涵盖) 简介: OpenCV 是跨平台的,可以在 Windows.Linux.Mac OS.Android.iOS 等操作系统上运行. OpenCV 的 ...
- 基于Emgu CV 的手势识别实现PPT的控制放映
Emgu CV 简介 众所周知,Emgu CV是.NET平台下对OpenCV图像处理库的封装,也就是.NET版的OpenCV.开发者可以很方便的通过C#,VB等语言调用OpenCV函数 ...
- iOS开发系列--触摸事件、手势识别、摇晃事件、耳机线控
-- iOS事件全面解析 概览 iPhone的成功很大一部分得益于它多点触摸的强大功能,乔布斯让人们认识到手机其实是可以不用按键和手写笔直接操作的,这不愧为一项伟大的设计.今天我们就针对iOS的触摸事 ...
随机推荐
- LaTeX-手动安装宏包(package)以及生成帮助文档的整套流程
我使用的是ctex套装,本来已经自带了许多package,但是有时候还是需要使用一些没有预装的宏包,这时就需要自己安装package了.下载package可以从CTAN(Comprehensive T ...
- HTML和CSS实现常见的布局
https://segmentfault.com/a/1190000003931851#articleHeader15
- redis安装和简介(2)
承接上篇未完成的配置...此次使用的的 Redis-x64-3.2.100 版本 一.打开redis服务器 方式一:打开 redis-server.exe 显示如下图: 图中: 显示运行进程号.当前运 ...
- js 实现商品放大镜效果
知识点,需熟悉下面属性及含义: offsetLeft //获取元素相对左侧的距离 (计算是从最左侧边框外开始) offsetTop //获取元素相对顶部的距离 ...
- StringJoiner
示例一 public class StringJoinerTest1 { public static void main(String[] args) { StringJoiner joiner = ...
- 三十、详述使用 IntelliJ IDEA 解决 jar 包冲突的问题
在实际的 Maven 项目开发中,由于项目引入的依赖过多,遇到 jar 冲突算是一个很常见的问题了.在本文中,我们就一起来看看,如何使用 IntelliJ IDEA 解决 jar 包冲突的问题!简单粗 ...
- POJ 1328 Radar Installation(很新颖的贪心,区间贪心)
Radar Installation Time Limit: 1000MS Memory Limit: 10000K Total Submissions: 106491 Accepted: 2 ...
- OpenCV 中CV_IMAGE_ELEM 的使用
CV_IMAGE_ELEM 是一个宏函数,基本形式: CV_IMAGE_ELEM(image,elemtype,row,col) 其中,image为指针数组,elemtype为数据的存取类型,row为 ...
- Oracle中插入千万条测试数据
测试需求,id.姓名.邮箱.手机号不可重复 1.创建序列 create sequence id_sequence; //创建序列id_sequence 2.创建表 create table USERI ...
- Oracle子查询之简单子查询
Oracle 简单子查询 顾名思义,简单子查询是嵌套在 SQL 语句中的另一个SELECT 语句,并且子查询只返回一列数据 1,单行子查询: 子查询 (内查询) 在主查询之前一次执行完成.子查询的结果 ...