TIAGO机器人传感器参数简介 手册翻译
本来认为这篇文章是最没人气的,竟然收到了回复,看来要继续更新本文了。留下笔者联系方式,邮箱leop22@163.com,欢迎邮件交流。
防止不良爬虫,原文链接:http://www.cnblogs.com/xueyudlut/p/7635509.html
------------------分割线------------------------------

教研室新进机器人,组内成员需要对其做一下必要的了解。手册纯英文内容多,这里挑重点介绍几条:
传感器:
作为输入设备,Tiago对周围环境感知完全通过各种传感器实现。配备的传感器有以下几种:
1,激光测距仪:0.05-10m 15Hz
2,声呐:0.03-1m 40kHz
3,惯性测量传感器:MPU 6050
4,立体声麦克风
5,电机电流反馈传感器
6,扭矩传感器
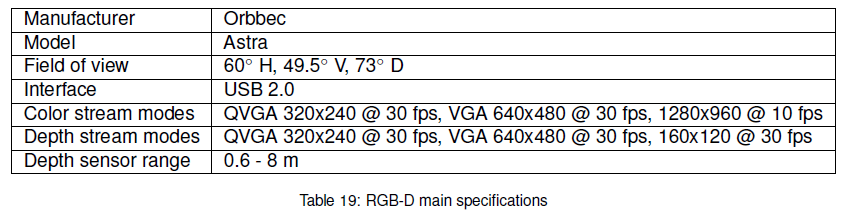
7,RGB-D 深度摄像机
移动基座:
TIAGo的移动基座配有差分驱动机构,包含板载计算机,电池,电源连接器,激光测距仪,三个后置声纳,用户面板,服务面板和两个WiFi网络,以确保无线连接。
此外,带有扩展坞的TIAGo版本在前面有一个充电板。
重要物理参数:
机械臂最大负重2kg,手指承重1kg(重点标注,超重损坏机器人!很难修的!)
躯干高度:110cm-145cm
最大移动速度:1m/s
头部:
TIAGo的头部配有俯仰电机,即2个DoF,并配有立体声麦克风,扬声器和RGB-D相机。 此外,在头部的顶部有一个带有安装点的平坦表面,以允许用户添加新的传感器或设备。
注意,添加新设备时,头部有效载荷为0.5 kg。 图18示出了俯仰机构的每个部件和两个接头的位置。
由于本实验室主要方向为计算机视觉,所以RGBD camera详细参数贴一下
开发电脑系统安装:
使用Tiago提供的USB驱动安装,创建以下几个默认用户:
root 密码palroot
pal 密码pal
aptuser 密码palaptuser
机器人内置电脑:
TIAGo计算机的名称是tiago-0c,其中0需要由机器人的序列号替换。 为了清楚起见,以下我们将使用tiago-0c来指代TIAGo的计算机名称。
链接机器人的ssh
ssh pal@tiago-0c
默认用户同上。
文件系统:
TIAGo的计算机具有防止可能损坏文件系统的电源故障的保护。
为了使用文件系统作为读写,请执行以下操作:
root@tiago-0c:~# rw
Remounting as rw...
Mounting /ro as read-write
Binding system files...
root@tiago-0c:~# chroot /ro
rw命令将所有分区重新挂载为读写。 然后一个chroot到/ ro我们有与默认相同的系统,但所有可写。 所有执行的更改都将持续。为了回到以前的状态,请执行以下操作:
root@tiago-0c:~# exit
root@tiago-0c:~# ro
Remount /ro as read only
Unbinding system files
第一个退出命令从chroot返回。 然后ro脚本以默认方式重新挂载分区。
内置DNS:
控制计算机具有用于具有域名reem-lan的TIAGo的内部LAN的DNS服务器。 该DNS服务器由连接到LAN的所有计算机使用。
当将计算机添加到内部LAN(例如使用以太网连接器)时,可以使用命令addLocalDns将其添加到内部DNS。(备注,暂时用不到,不展开)
开发计算机:
SDE开发计算机中使用的操作系统基于Linux Ubuntu 14.04 LTS发行版。 与此特定Linux发行版有关的任何文档适用于SDE。 本文仅指出了PAL SDE与Ubuntu 14.04的不同之处。
配置要求:
推荐使用具有8个CPU内核的计算机。 建议使用分辨率至少为1920x1080像素的强大显卡,以便在使用可视化工具(如rviz和Gazebo模拟器)时获得更好的用户体验。 开发计算机ISO提供对Nvidia卡的支持。
在升级开发计算机的内核的情况下,PAL机器人无法确保对其他显卡的正确支持。
在开发基于ROS的机器人应用程序时,通常将机器人的计算机上运行的rosmater和运行ROS节点的开发计算机连接到机器人的rosmaster。 这是通过在运行ROS节点的开发计算机的每个终端设置以下环境变量来实现的:
export ROS_MASTER_URI=http://tiago-0c:11311
请注意,为了在不同的计算机之间成功交换ROS消息,他们中的每一个都需要能够解析其他计算机的主机名。 这意味着机器人计算机需要能够解析任何开发计算机的主机名,反之亦然。
否则,ROS消息将无法正确交换,并会发生意外行为。在开始使用运行指向机器人的rosmaster的ROS节点的开发计算机之前,请执行以下检查:
ping tiago-0c
确保ping命令到达机器人的计算机。 然后从机器人做同样的事情:
ssh pal@tiago-0c
ping devel_computer_hostname
如果ping未到达开发计算机,则继续将主机名添加到机器人的本地DNS。 否则,您可以导出环境变量ROS_IP - 从机器人可见的开发计算机的IP。
例如,如果将机器人设置为接入点,并且开发计算机连接到它,并且已经给出了IP 10.68.0.128(使用ifconfig来计算出),则在用于与机器人通信的所有终端中使用以下命令:
export ROS_MASTER_URI=http://tiago-0c:11311
export ROS_IP=10.68.0.128
所发送的所有ROS命令将使用计算机的IP而不是主机名。
可以看出,有两个主要的软件块:操作系统是Ubuntu,具有实时内核补丁Xenomai,以及基于Orocos的机器人中间件,用于实时,安全的进程间通信。
TIAGO机器人传感器参数简介 手册翻译的更多相关文章
- SLAM:飞行机器人的参数解析-分类
在水电站存在的山区,公路运输效率极低,盘山公路绕行消耗大量时间,使用飞行机器人进行运输是合适的选择. 实现一位长辈在山区飞行的愿望,任重而道远 常见飞行机器人的参数解析:解读飞行机器人的基本类型及技术 ...
- Lottie简介(翻译)
以下内容为原创,欢迎转载,转载请注明 来自天天博客:http://www.cnblogs.com/tiantianbyconan/p/6364634.html Lottie简介(翻译) 新的向本地ap ...
- MariaDB官方手册翻译
MariaDB官方手册 翻译:create database语句(已提交到MariaDB官方手册) 翻译:rename table语句(已提交到MariaDB官方手册) 翻译:alter table语 ...
- mqtt------ mosca服务器端参数简介
一:服务器端 为什么使用mosca:mosca是基于node.js开发,上手难度相对较小,其次协议支持完整,除了不支持Qos 2,其它的基本都支持.持久化支持redis以及mongo.二次开发接口简单 ...
- 【ABAP系列】SAP abap dialog screen屏幕参数简介
公众号:SAP Technical 本文作者:matinal 原文出处:http://www.cnblogs.com/SAPmatinal/ 原文链接:[ABAP系列]SAP abap dialog ...
- Java垃圾回收手册翻译 - 什么是垃圾回收
Java垃圾回收手册翻译 - 什么是垃圾回收 初看之下,垃圾回收应该要做其名称之事 - 找到和丢掉垃圾.然而事实上它正好做着相反的事,垃圾回收会记录所有仍在使用中的对象,然后将其他标记为垃圾.谨记这点 ...
- zabbix通过IPMI监控服务器传感器参数
一.需求:机房dell服务器和IBM服务器皆有主板管理接口iDRAC和iMM,上周已为服务器管理接口配置了ip地址,考虑通过zabbix实现对服务器传感器参数的实时监控.使用DELL-DL1300服务 ...
- Hive官方手册翻译(Getting Started)
翻译Hive官方文档系列,文中括号中包含 注: 字样的,为我自行标注的,水平有限,翻译不是完美无缺的.如有疑问,请参照Hive官方文档对照查看. 内容列表 Cloudera制作的Hive介绍视频 ...
- Hive官方手册翻译(Getting Started)(转)
原文:http://slaytanic.blog.51cto.com/2057708/939950 翻译Hive官方文档系列,文中括号中包含 注: 字样的,为我自行标注的,水平有限,翻译不是完美无缺的 ...
随机推荐
- 自己用的opensuse源
utsc_oss http://mirrors.ustc.edu.cn/opensuse/distribution/13.1/repo/oss/utsc_non_oss ...
- Java入门系列-18-抽象类和接口
抽象类 在第16节继承中,有父类 People People people=new People(); people.sayHi(); 实例化People是没有意义的,因为"人"是 ...
- jqgrid 加载时第一页面只显示多少条数据
function initGrid() { localGrid = jQuery("#tbList"); localGrid.jqGrid({ data: localData, d ...
- C#操作Redis List 列表
/// <summary> /// Redis 列表 /// </summary> public static void Redis_List() { RedisClient ...
- plpgsql 函数定义
--Function: dbo.fn_test(integer) --DROP FUNCTION dbo.fn_test(integer); CREATE OR REPLACE FUNCTION db ...
- Centos 从零开始 (四)
12:nginx架设 rtmp直播 首先在之前 所安装的nginx是用 yum 源安装的.却不能为nginx添加他的模块 所以要用wget来下载源文件 来进行源码配置与安装.开搞 [root@loca ...
- css样式、js2种方式 控制字符个数,多余的字用省略号代替
大家好,我是小菜 前端 ,技术不高,正在努力中充电!希望大家多多指教:css <div class="show">大家好,我是小菜 前端 ,技术不高,正在努力中充电!希 ...
- MVC-cshtml(条件编译已关闭)
加单引号
- 常用软件下载开发环境七牛镜像Java、Node、Mongo
[jdk1.8] Linux:http://soft.yzeng.cc/jdk18/jdk-8u202-linux-x64.tar.gz Windows:http://soft.yzeng.cc/jd ...
- 异步http请求的实现
这是我自己在某论坛上发的一篇水贴:http://www.sufeinet.com/thread-9275-1-2.html,原理和解释,我就直接重发一遍在自己博客上了. 时隔一个月 回来把之前的坑填 ...