在ROS下编写自己的节点来订阅话题(C++)
参考 http://blog.csdn.net/u013453604/article/details/49102957 的博客,其实这些内容和 《开源机器人操作系统》 这本书差不多。
具体的步骤我就不多说了,,不过我这里是在QT 中开发的,,个人觉得还是很方便的。。
这里就讲一下我遇到的问题,
------在编写好 .cpp 之后,我按照自己的理解修改了 CMakeLists.txt 文件,,但总是会出现一个错误:
[rosrun] Couldn't find executable named。。。。。。。。。
这个信息的意思是:没有catkin_make 这个节点文件,
但是我反复试了好几次catkin_make,,在QT试了,,也在终端中试了,,但还是不行,,
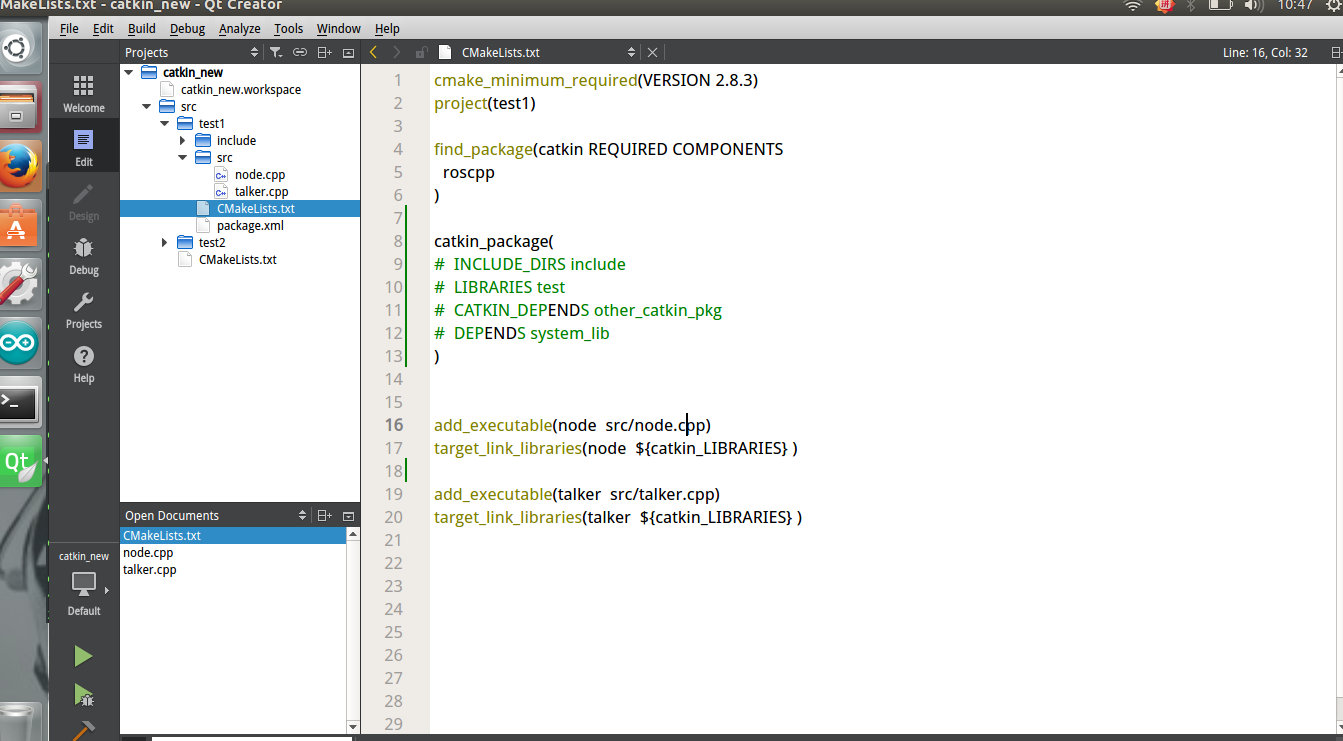
所以我就好好的查看 CMakeLists.txt 文件 ,,果然,,我把下面的内容给删掉了:
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES test
# CATKIN_DEPENDS other_catkin_pkg
# DEPENDS system_lib
)
加上这个之后就好了。。。。。
但这几句是什么意思呢?
[function defined in catkin_package.cmake]
应该是在工作空间中定义需要 catkin_make 的包,,如果没有这个的话,,catkin_make 就找不到要编译的包
这是我个人理解,,不知道正确与否,,还希望大神能够指出我的错误。。。。。
附上截图
哈
在ROS下编写自己的节点来订阅话题(C++)的更多相关文章
- ROS下创建第一个节点工程
1.创建工作区 mkdir catkin_ws cd catkin_ws mkdir src 2.在src目录下创建包Myrobot,后面所跟roscpp rospy为依赖包 catkin_creat ...
- ROS手动编写消息发布器和订阅器topic demo(C++)
1.首先创建 package cd ~/catkin_ws/src catkin_create_pkg topic_demo roscpp rospy std_msgs 2. 编写 msg 文件 cd ...
- ros下多机器人系统(1)
multi-robot system 经过两个多月的ros学习,对ros的认识有了比较深入的了解,本篇博客主要记录在ros下开发多机器人系统以及对ros更深入的开发.本篇博客是假定读者已经学习完了全部 ...
- ZED 相机 && ORB-SLAM2安装环境配置与ROS下的调试
注:1. 对某些地方进行了更新(红色标注),以方便进行配置. 2. ZED ROS Wrapper官方github已经更新,根据描述新的Wrapper可能已经不适用与Ros Indigo了,如果大家想 ...
- pl-svo在ROS下运行笔记
一.程序更改的思路(参考svo_ros的做法): 1.在ROS下将pl-svo链接成库需要更改相应的CMakeLists.txt文件,添加package.xml文件: 2.注册一个ROS节点使用svo ...
- ros下基于百度语音的,语音识别和语音合成
代码地址如下:http://www.demodashi.com/demo/13153.html 概述: 本demo是ros下基于百度语音的,语音识别和语音合成,能够实现文字转语音,语音转文字的功能. ...
- ROS下使用ASUS Xtion Pro Live
一.ROS官网hydro版本OpenNI安装 3. Installation 3.1 Ubuntu installation To install only openni_camera: sudo a ...
- LSD-SLAM深入学习(1)-基本介绍与ros下的安装
前言 借鉴来自RGB-D数据处理的两种方法-基于特征与基于整体的,同样可以考虑整个图片的匹配,而不是只考虑特征点的…… 一般这种稠密的方法需要很大的计算量,DTAM: Dense tracking a ...
- SQL 递归查询(根据指定的节点向上获取所有父节点,向下获取所有子节点)
--------------------01.向上查找所有父节点-----------------WITH TEMP AS (SELECT * FROM CO_Department WHERE ID= ...
随机推荐
- easyUI datagrid view扩展
//扩展easyuidatagrid无数据时显示界面 var emptyView = $.extend({}, $.fn.datagrid.defaults.view, { onAfterRender ...
- Git版本控制软件结合GitHub从入门到精通常用命令学习手册(转)
简要参考:http://www.tuicool.com/articles/mEvaq2 http://gitref.org/zh/index.html GIT 学习手册简介 本站为 Git 学习参考手 ...
- jquery mobile 图片自适应问题
解决办法: 加入一段css <link rel="stylesheet" href="http://jquerymobile.com/demos/1.1.0/doc ...
- Elmah 日志记录组件
http://www.cnblogs.com/jys509/p/4571298.html 简介 ELMAH(Error Logging Modules and Handlers)错误日志记录模块和处理 ...
- 清除inline-block元素间距
方法1 .clear{ letter-spacing: -4px;/*根据不同字体字号或许需要做一定的调整*/ word-spacing: -4px; font-size: 0;} 方法2 .clea ...
- Java并发编程核心方法与框架-Executors的使用
合理利用线程池能够带来三个好处 降低资源消耗.通过重复利用已创建的线程降低线程创建和销毁造成的消耗. 提高响应速度.当任务到达时,任务可以不需要等到线程创建就能立即执行. 提高线程的可管理性.线程是稀 ...
- ElasticSearch已经配置好ik分词和mmseg分词(转)
ElasticSearch是一个基于Lucene构建的开源,分布式,RESTful搜索引擎.设计用于云计算中,能够达到实时搜索,稳定,可靠,快速,安装使用方便.支持通过HTTP使用JSON进行数据索引 ...
- Redis在WEB开发中的应用与实践
Redis在WEB开发中的应用与实践 一.Redis概述: Redis是一个功能强大.性能高效的开源数据结构服务器,Redis最典型的应用是NoSQL.但事实上Redis除了作为NoSQL数据库使用之 ...
- Xshell4注册码,Xftp注册码
Xshell 是一个强大的安全终端模拟软件,商业版注册码如下: Xshell 4 注册码: 690313-111999-999313 Xftp 4 注册码:101210-450789-147200 X ...
- C#2.0 特性
泛型 迭代器 分布类 可空类型 匿名方法 命名空间别名限定符 静态类 外部程序程序集别名 属性访问器可访问性 委托中的协变和逆变 如何声明.实例化.使用委托 固定大小的缓冲区 友元程序集 内联警告控制 ...