COLMAP简易教程(命令行模式)
完整的 multi view stereo pipeline 会有以下步骤
structure from motion(SfM)==> camera parameters, sparse point cloud
multi view stereo(MVS)==>depth map, dense point cloud
surface reconstruction(SR)==>poisson or delauny reconstruction, mesh
texture mapping(TM)==>get mesh with texture
COLMAP整体流程如下图所示

COLMAP重建过程主要步骤
COLMAP 兼容好几种不同的相机模型,我们在使用时可以对相机模型进行限制以获得最好的效果。
如果提前不知道相机内参,最好使用包含畸变系数的模型,默认为 SIMPLE_RAIDIAL 。
如果已知相机没有畸变或畸变影响很小,建议使用 SIMPLE_PINHOLE 模型。
可供选择的模型分别为
SIMPLE_PINHOLE, PINHOLE, SIMPLE_RADIAL, RADIAL, OPENCV, FULL_OPENCV,
SIMPLE_RADIAL_FISHEYE, RADIAL_FISHEYE, OPENCV_FISHEYE, FOV, THIN_PRISM_FISHEYE
不同模型含义及参数如下表所示,详见 Camera Models

Camera Models
camera_calibration_and_3d_reconstruction
Structure from Motion
运动恢复结构流程如下图所示
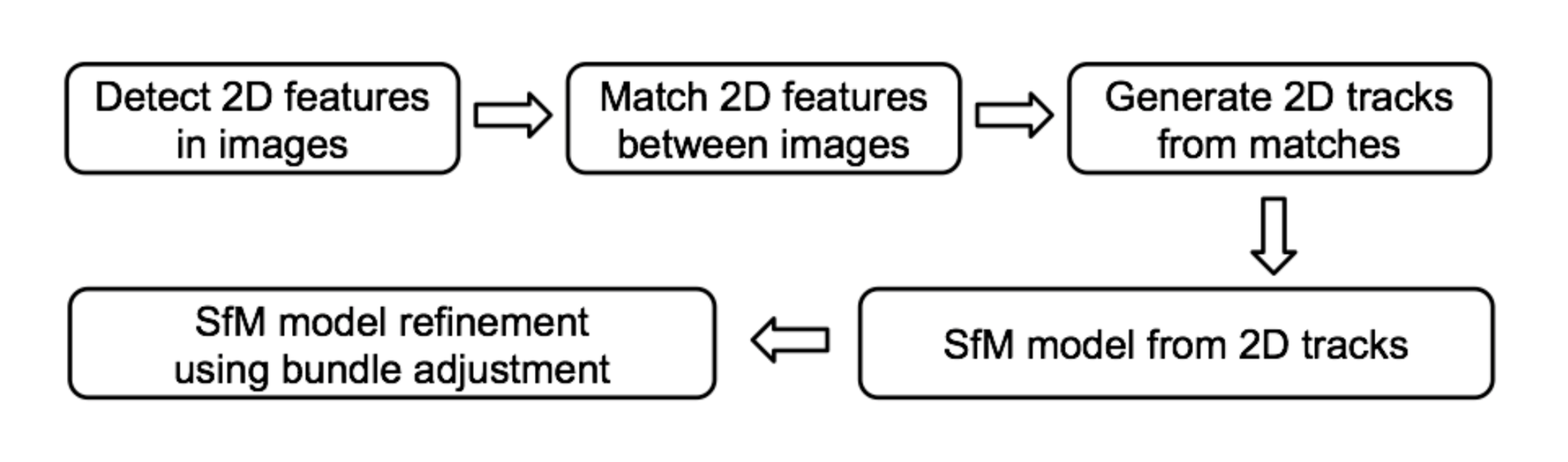
运动恢复结构主要步骤
运动恢复结构的目的是求解相机参数,需要把所有输入图片放到一个文件夹下。按如下步骤依次进行。
图像特征提取
相机内参已知的情况下我们可以直接通过命令行参数 ImageReader.camera_params 传给 COLMAP。
a. 相机内参已知
$ colmap feature_extractor \
--database_path ./database.db \
--image_path images \
--ImageReader.camera_model SIMPLE_PINHOLE \
--ImageReader.camera_params "1813.3334,1920,1080" \
--SiftExtraction.max_image_size 3840
其中 camera_params 为 std::string 类型,不同的模型有对应的表示方式。参数及含义参考上面表格中的各种相机模型。
b. 相机内参未知
$ colmap feature_extractor \
--database_path ./database.db \
--image_path images \
--ImageReader.camera_model SIMPLE_PINHOLE \
--SiftExtraction.max_image_size 3840
其中 database_path 设置工程数据文件的保存路径
image_path 设置输入图像所在文件夹路径
camera_model 设置相机模型
max_image_size 设置为大于图像最大边所对应的分辨率的值
图像特征匹配
$ colmap exhaustive_matcher --database_path $DATASET_PATH/database.db
其中 database_path 设置为特征点检测时工程数据文件保存的路径。
相机位姿求解与优化
$ mkdir $DATASET_PATH/sparse
$ colmap mapper \
--database_path $DATASET_PATH/database.db \
--image_path $DATASET_PATH/images \
--output_path $DATASET_PATH/sparse \
--Mapper.ba_refine_principal_point true
模型转换与参数读取
在进行稀疏重建之后,model 默认会被导出到 bin 文件中,因为这样比较紧凑,节省空间,可以使用 COLMAP 的模型转换功能将其转换成 txt 文件。
注意下面的指令中 input_path 和 output_path 是文件所在文件夹的路径,而不是单个文件路径。
$ colmap model_converter \
--input_path $DATASET_PATH/sparse/0 \
--output_path $DATASET_PATH/sparse \
--output_type TXT
a. 相机内参 cameras.txt 格式如下
# Camera list with one line of data per camera:
# CAMERA_ID, MODEL, WIDTH, HEIGHT, PARAMS[]
# Number of cameras: 3
1 SIMPLE_PINHOLE 3072 2304 2559.81 1536 1152
2 PINHOLE 3072 2304 2560.56 2560.56 1536 1152
3 SIMPLE_RADIAL 3072 2304 2559.69 1536 1152 -0.0218531
b. 相机外参,包含旋转和平移,以及每张图片中特征点在图像中的二维坐标及其对应的三维稀疏点索引images.txt 格式如下,注意这里的旋转保存为单位四元数形式,与 Eigen::Quaterniond 格式相同
# Image list with two lines of data per image:
# IMAGE_ID, QW, QX, QY, QZ, TX, TY, TZ, CAMERA_ID, NAME
# POINTS2D[] as (X, Y, POINT3D_ID)
# Number of images: 2, mean observations per image: 2
1 0.851773 0.0165051 0.503764 -0.142941 -0.737434 1.02973 3.74354 1 P1180141.JPG
2362.39 248.498 58396 1784.7 268.254 59027 1784.7 268.254 -1
2 0.851773 0.0165051 0.503764 -0.142941 -0.737434 1.02973 3.74354 1 P1180142.JPG
1190.83 663.957 23056 1258.77 640.354 59070
c. 稀疏三维点云中三维空间点的信息 points3D.txt 格式如下
# 3D point list with one line of data per point:
# POINT3D_ID, X, Y, Z, R, G, B, ERROR, TRACK[] as (IMAGE_ID, POINT2D_IDX)
# Number of points: 3, mean track length: 3.3334
63390 1.67241 0.292931 0.609726 115 121 122 1.33927 16 6542 15 7345 6 6714 14 7227
63376 2.01848 0.108877 -0.0260841 102 209 250 1.73449 16 6519 15 7322 14 7212 8 3991
63371 1.71102 0.28566 0.53475 245 251 249 0.612829 118 4140 117 4473
如果需要进一步 rectify, 可以把参数输入到 OpenCV 的 stereoRectify() 函数中,之后 initUndistortRectifyMap() , 最后使用 remap() 函数进行重映射 从而得到矫正的结果。
Dense Reconstruction
利用前面的步骤求得的相机参数进行稠密重建,由 PatchMatch 求解单视角对应的深度图和法向图,同时根据需要对深度图和法相图进行滤波。
图像畸变矫正
$ mkdir $DATASET_PATH/dense
$ colmap image_undistorter \
--image_path $DATASET_PATH/images \
--input_path $DATASET_PATH/sparse/0 \
--output_path $DATASET_PATH/dense \
--output_type COLMAP \
--max_image_size 3840
立体块匹配
$ colmap patch_match_stereo \
--workspace_path $DATASET_PATH/dense \
--workspace_format COLMAP \
--PatchMatchStereo.max_image_size 3840 \
--PatchMatchStereo.window_radius 9 \
--PatchMatchStereo.geom_consistency true \
--PatchMatchStereo.filter_min_ncc 0.07
对于纹理不是特别丰富的场景,建议增加 windows_radius 以及降低 filter_min_ncc 来提升深度值求解的准确度。
Mesh and Texutre Map
点云融合
$ colmap stereo_fusion \
--workspace_path $DATASET_PATH/dense \
--workspace_format COLMAP \
--input_type geometric \
--output_path $DATASET_PATH/dense/fused.ply
表面网格重建
$ colmap poisson_mesher \
--input_path $DATASET_PATH/dense/fused.ply \
--output_path $DATASET_PATH/dense/meshed-poisson.ply
$ colmap delaunay_mesher \
--input_path $DATASET_PATH/dense \
--output_path $DATASET_PATH/dense/meshed-delaunay.ply
—————— END ——————
本文作者 :phillee
发表日期 :2021年1月27日
本文链接 :https://www.cnblogs.com/phillee/p/14335034.html
版权声明 :自由转载-非商用-非衍生-保持署名(创意共享3.0许可协议/CC BY-NC-SA 3.0)。转载请注明出处!
限于本人水平,如果文章和代码有表述不当之处,还请不吝赐教。
COLMAP简易教程(命令行模式)的更多相关文章
- 好压(HaoZip)的命令行模式用法介绍
好压压缩软件,又叫“2345好压”,是一款国产的优秀压缩软件,目前是免费的,据官网介绍,该软件永久免费.官网地址:http://haozip.2345.com/ 本文主要对该软件的命令行模式用法进行介 ...
- WinRAR的命令行模式用法介绍
因工作中要对数据打包,顺便研究了下WinRAR的命令行模式,自己写了些例子,基本用法如下: 测试压缩文件准备:文件夹test_data,内部包含子文件夹,分别存放了一些*.log和*.txt文件. 测 ...
- 命令行模式 svn版本管理
linux 下svn 在命令行模式下的操作安装完svn服务并配置了环境变量之后,要创建一个存放工厂(项目)的仓库repositories用于版本控制(比如我的repositories的路径为 path ...
- Linux 命令行模式 你需要知道的那些事
注: 安装软件 pip install + 软件名 例如: pip install xadmin 卸载软件 pip uninstall + 软件名 例如 pip uninstall xadmin 安 ...
- 如何在命令行模式下查看Python帮助文档---dir、help、__doc__
如何在命令行模式下查看Python帮助文档---dir.help.__doc__ 1.dir函数式可以查看对象的属性,使用方法很简单,举str类型为例,在Python命令窗口输入 dir(str) 即 ...
- Linux 开机启动方式设置 inittab 详解,开机直接进入“命令行”模式
Linux下的 /etc/inittab 中的英文解释: This file describes how the INIT process should set up the system in a ...
- Ubuntu 开机进入命令行模式
1.修改配置 sudo vim /etc/default/grub 把 GRUB_CMDLINE_LINUX_DEFAULT="quiet splash" 改为 GRUB_CMDL ...
- 命令行模式下 MYSQL导入导出.sql文件的方法
一.MYSQL的命令行模式的设置:桌面->我的电脑->属性->环境变量->新建->PATH=“:path\mysql\bin;”其中path为MYSQL的安装路径.二.简 ...
- [转载] ubuntu开机直接进入命令行模式
最近安装了ubuntu12.04来使用,每次都进入unity界面再进入命令行很不方便. 不需要界面的话,可以通过设置来开机进入命令行模式. 今天提供两中比较好的方法.经本人测试两中方法都可使用. [1 ...
随机推荐
- 只要肯下功夫,十岁也能学得会的 Docker 精简版!
目录 一.Docker简介 1.1 什么是Docker 1.2 Docker中包括三个基本的概念 1.3 Docker组件 1.4 安装Docker 二.Docker常用命令 三.应用部署 3.1 m ...
- EXCEL2010分成多个窗口的,解决单个窗口显示多个文档的弊病
本操作需要修改注册表,请在修改之前导出要修改的项目以备份. 1.定位到[HKEY_CLASSES_ROOT\Excel.Sheet.12\shell\Open],导出保存.展开Open,将ddeexe ...
- Sentinel入门学习记录
最近公司里面在进行微服务开发,因为有使用到限流降级,所以去调研学习了一下Sentinel,在这里做一个记录. Sentinel官方文档:https://github.com/alibaba/Senti ...
- 短链接服务Octopus的实现与源码开放
前提 半年前(2020-06)左右,疫情触底反弹,公司的业务量不断提升,运营部门为了方便短信.模板消息推送等渠道的投放,提出了一个把长链接压缩为短链接的功能需求.当时为了快速推广,使用了一些比较知名的 ...
- VC维相关知识
假设空间H(Hypothesis Set) 输入空间D(X1...Xn) 1.增长函数(grown function) 是关于输入空间尺寸n的函数 假设空间对于D中所有实例实现分类(赋予标记)的分类方 ...
- jQuery的data()方法
jQuery文档对.data()方法的描述: As of jQuery 1.4.3 HTML 5 data- attributes will be automatically pulled in to ...
- wildfly 21的配置文件和资源管理
目录 简介 wildfly的配置文件 extensions profile path interface socket-binding management 资源管理 总结 简介 在上一篇文章我们介绍 ...
- mysql explain参数详解
主要对几个参数做一些记录 type:显示的是访问类型 从最好到最差的连接类型为:const.eq_reg.ref.range.index和ALL 至少要达到range,基本是ref 最好是const ...
- win8.1默认输入法设置
1.右击左下角,选择控制面板 2.选择更改输入法 3.选择高级设置 4.在替代默认输入法,从下拉列表中选择自己已安装的输入法,比如搜狗拼音输入法,qq拼音输入法等其他输入法
- 洛谷P4848 崂山白花蛇草水 权值线段树+KDtree
题目描述 神犇 \(Aleph\) 在 \(SDOI\ Round2\) 前立了一个 \(flag\):如果进了省队,就现场直播喝崂山白花蛇草水.凭借着神犇 \(Aleph\) 的实力,他轻松地进了山 ...