ros2中创建一个python package
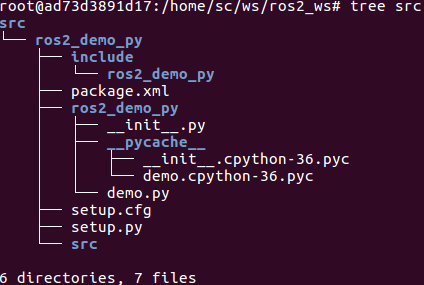
完整的python package的目录结构如下:
- source /opt/ros/dashing/setup.bash
- cd ros2_ws/src && ros2 pkg create <package_name>
- Delete CMakeLists.txt , create setup.py and setup.cfg and edit package.xml
setup.py内容参考:
from setuptools import setup
package_name = 'ros2_demo_py'
setup(
name=package_name,
version='0.7.0',
packages=[package_name],
install_requires=['setuptools'],
zip_safe=True,
author='You',
author_email='you@youremail.com',
maintainer='YourFirstname Lastname',
maintainer_email='your@youremail.com',
keywords=['ROS'],
classifiers=[
'Intended Audience :: Developers',
'License :: OSI Approved :: Apache Software License',
'Programming Language :: Python',
'Topic :: Software Development',
],
description='A simple ROS2 Python package',
license='Apache License, Version 2.0',
tests_require=['pytest'],
entry_points={
'console_scripts': [
'demo = ros2_demo_py.demo:main'
],
},
)
fbi warning!!!!!!!!!
'console_scripts': [
'demo = ros2_demo_py.demo:main'
],
告知ros2如何加载脚本.比如ros2 run ros2_demo_py demo实际上就是说要去执行ros2_demo_py/demo.py的main()函数. 更改setup.py后必须重新colcon build才会生效.
当我改成'console_scripts': [
'fuck_ = ros2_demo_py.what:main'
],时,相应的执行命令就变为ros2 run ros2_demo_py fuck_,执行的就是ros2_demo_py/what.py的main()函数
setup.cfg内容参考:
[develop]
script-dir=$base/lib/ros2_demo_py
[install]
install-scripts=$base/lib/ros2_demo_py
package.xml内容参考:
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format2.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="2">
<name>ros2_demo_py</name>
<version>0.7.3</version>
<description>A simple ROS2 Python package</description>
<maintainer email="sloretz@openrobotics.org">Shane Loretz</maintainer>
<license>Apache License 2.0</license>
<exec_depend>rclpy</exec_depend>
<exec_depend>std_msgs</exec_depend>
<!-- These test dependencies are optional
Their purpose is to make sure that the code passes the linters -->
<test_depend>ament_copyright</test_depend>
<test_depend>ament_flake8</test_depend>
<test_depend>ament_pep257</test_depend>
<test_depend>python3-pytest</test_depend>
<export>
<build_type>ament_python</build_type>
</export>
</package>
- 创建python代码
demo.py
# Copyright 2016 Open Source Robotics Foundation, Inc.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import rclpy
from rclpy.node import Node
from std_msgs.msg import String
class MinimalPublisher(Node):
def __init__(self):
super().__init__('minimal_publisher')
self.publisher_ = self.create_publisher(String, 'topic')
timer_period = 0.5 # seconds
self.timer = self.create_timer(timer_period, self.timer_callback)
self.i = 0
def timer_callback(self):
msg = String()
msg.data = 'Hello World: %d' % self.i
self.publisher_.publish(msg)
self.get_logger().info('Publishing: "%s"' % msg.data)
self.i += 1
def main(args=None):
rclpy.init(args=args)
minimal_publisher = MinimalPublisher()
rclpy.spin(minimal_publisher)
# Destroy the node explicitly
# (optional - otherwise it will be done automatically
# when the garbage collector destroys the node object)
minimal_publisher.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
- 回到workspace目录,编译
user:~/ros2_ws$ colcon build --symlink-install
详细步骤参考:https://www.theconstructsim.com/ros2-tutorials-5-how-to-create-a-ros2-package-for-python-update/
ros2中创建一个python package的更多相关文章
- 创建一个目录info,并在目录中创建一个文件test.txt,把该文件的信息读取出来,并显示出来
/*4.创建一个目录info,并在目录中创建一个文件test.txt,把该文件的信息读取出来,并显示出来*/ #import <Foundation/Foundation.h>#defin ...
- Ionic 2 中创建一个照片倾斜浏览组件
内容简介 今天介绍一个新的UI元素,就是当我们改变设备的方向时,我们可以看到照片的不同部分,有一种身临其境的感觉,类似于360全景视图在移动设备上的应用. 倾斜照片浏览 Ionic 2 实例开发 新增 ...
- iOS9中如何在日历App中创建一个任意时间之前开始的提醒(三)
大熊猫猪·侯佩原创或翻译作品.欢迎转载,转载请注明出处. 如果觉得写的不好请多提意见,如果觉得不错请多多支持点赞.谢谢! hopy ;) 四.创建任意时间之前开始的提醒 现在我们找到了指定源中的指定日 ...
- 在C#/.NET应用程序开发中创建一个基于Topshelf的应用程序守护进程(服务)
本文首发于:码友网--一个专注.NET/.NET Core开发的编程爱好者社区. 文章目录 C#/.NET基于Topshelf创建Windows服务的系列文章目录: C#/.NET基于Topshelf ...
- Eclipse中创建一个新的SpringBoot项目
在Eclipse中创建一个新的spring Boot项目: 1. 首先在Eclipse中安装STS插件:在Eclipse主窗口中点击 Help -> Eclipse Marketplace... ...
- 在存放源程序的文件夹中建立一个子文件夹 myPackage。例如,在“D:\java”文件夹之中创建一个与包同名的子文件夹 myPackage(D:\java\myPackage)。在 myPackage 包中创建一个YMD类,该类具有计算今年的年份、可以输出一个带有年月日的字符串的功能。设计程序SY31.java,给定某人姓名和出生日期,计算该人年龄,并输出该人姓名、年龄、出生日期。程序使用YM
题目补充: 在存放源程序的文件夹中建立一个子文件夹 myPackage.例如,在“D:\java”文件夹之中创建一个与包同名的子文件夹 myPackage(D:\java\myPackage).在 m ...
- 父类是在子类创建对象时候 在子类中创建一个super内存空间
父类是在子类创建对象时候 在子类中创建一个super内存空间
- iOS9中怎样在日历App中创建一个随意时间之前開始的提醒(三)
大熊猫猪·侯佩原创或翻译作品.欢迎转载,转载请注明出处. 假设认为写的不好请多提意见,假设认为不错请多多支持点赞.谢谢! hopy ;) 四.创建随意时间之前開始的提醒 如今我们找到了指定源中的指定日 ...
- [Xcode 实际操作]九、实用进阶-(28)在iTunes Connect(苹果商店的管理后台)中创建一个新的新的APP
目录:[Swift]Xcode实际操作 本文将演示如何在iTunes Connect(苹果商店的管理后台)中创建一个新的新的APP. 首先要做的是打开浏览器,并进入[iTunesConnect网站], ...
随机推荐
- 函数基础重点掌握内容:创建函数、return返回单个值、return返回多个值、函数名加括号与不加括号的区别
##比较两个数大小 #有参函数!!! def compare(s,t): if s > t: print(s) else: print(t) f=compare compare(1000,30) ...
- 2016/09/22 mapreduce
1.概念 Mapreduce是一个计算框架,表现形式是有个输入(input),mapreduce操作这个输入,通过本身定义好的计算模型,得到一个输出(output),也就是我们需要的结果. 在运行一个 ...
- 在命令提示符下,运行Java程序时,提示"找不到或无法加载主类"
小白:在命令提示符下,运行Java程序时,提示"找不到或无法加载主类". 大神:运行Java程序的作用是让Java解释器装载,检验并运行字节码文件(.class).因此,在运行Ja ...
- 手写SpringMVC
环境描述 idea java 8 1. POM文件 <?xml version="1.0" encoding="UTF-8"?> <proje ...
- 6. abp中的拦截器
abp拦截器基本定义 拦截器接口定义: public interface IAbpInterceptor { void Intercept(IAbpMethodInvocation invocatio ...
- 关于EXIT和BADI增强的查找
EXIT出口的查找: 方法一: 第一步:通过SE30,输入TCODE(例如ME21N),执行EXCUTE,前台创建一张采购订单.点击TIMES页签,查找EXIT开头的SAP程序. 第二步:这些fun ...
- Android 再次打开APP进入按Home键退出时的界面(thisTaskRoot)
问题 Android 设置页面的启动模式为 singletask 之后,当按Home 退出时,再重新打开应用,还会进入首启动页.就会造成一些应用需要重新登录,当前页数据丢失等问题 解决 去除启动页的 ...
- ASP.NET Core on K8S深入学习(8)数据管理
本篇已加入<.NET Core on K8S学习实践系列文章索引>,可以点击查看更多容器化技术相关系列文章. 在Docker中我们知道,要想实现数据的持久化(所谓Docker的数据持久化即 ...
- Android组件体系之ContentProvider使用注意事项
1.数据访问机制 客户端/调用者通过getContentResolver调用,由ActivityThread.AMS获取到ContentProvider的代理,再通过这个代理对象调用服务端的实现(也即 ...
- Eureka 入门,带视频
疯狂创客圈 Java 高并发[ 亿级流量聊天室实战]实战系列 [博客园总入口 ] 架构师成长+面试必备之 高并发基础书籍 [Netty Zookeeper Redis 高并发实战 ] 前言 Crazy ...