【强化学习RL】model-free的prediction和control —— MC,TD(λ),SARSA,Q-learning等
本系列强化学习内容来源自对David Silver课程的学习 课程链接http://www0.cs.ucl.ac.uk/staff/D.Silver/web/Teaching.html
本文介绍了在model-free情况下(即不知道回报Rs和状态转移矩阵Pss'),如何进行prediction,即预测当前policy的state-value function v(s)从而得知此policy的好坏,和进行control,即找出最优policy(即求出q*(s, a),这样π*(a|s)就可以立刻知道了)。
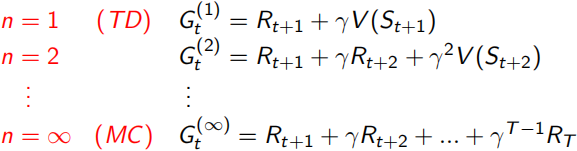
在prediction部分中,介绍了Monto Carlo(MC),TD(0),TD(λ)三种抽样(sample)估计方法,这里λ的现实意义是随机sample一个state,考虑其之后多少个state的价值。当λ=0即TD(0)时,只考虑下一个状态;λ=1 时几乎等同MC,考虑T-1个后续状态即到整个episode序列结束;λ∈(0,1)时为TD(λ),可以表示考虑后续非这两个极端状态的中间部分,即考虑后面n∈(1, T-1)个状态。同时,prediction过程又分为online update和offline update两部分,即使用当前π获得下一个状态的回报v(s')和优化policy π是否同时进行。
在control部分中,介绍了如何寻找最优策略的方法,即找到q*(s, a)。分成on-policy和off-policy两部分,即没有或者是参考了别人的策略(比如机器人通过观察人的行为提出更好的行为)。在on-policy部分,介绍了MC control、SARSA、SARSA(λ)三种方法,off-policy部分介绍了Q-learning的方法。
具体都会在下面正文介绍。
目录:
一、model-free的prediction
1. Monto Carlo(MC) Learning
2. Temporal-Difference TD(0)
3. TD(λ)
二、model-free的control
1. on-policy的Monto Carlo(MC) control
2. on-policy的Temporal-Difference(TD) Learning - SARSA和SARSA(λ)
3. off-policy的Q-learning
一、model-free的prediction
Prediction 部分的内容,全部都不涉及action。因为是衡量当前policy的好坏,只需要估计出每个状态的state-value function v(s)即可。上一文中介绍了使用Bellman Expectation Equation求得某个状态v(s)的数学期望,可以用动态规划DP进行遍历全部状态求得。但是这样的效率是非常低的,下面介绍了两种用sample采样的方法获取v(s)。
1. Monto Carlo(MC) Learning
Monto Carlo是一个经常会遇到的词,它的核心思想是从状态st出发随机采样sample至获得很多个完整序列,可以获得完整序列的实际收益,从而取平均值就是v(st)。需要注意的是,MC只能用于terminate的序列(complete)中。
在MC sample的过程中,每个状态点值函数 ,每次遍历N(s)+=1,S(s)为总回报每次S(s)+=Gt,这样当
,每次遍历N(s)+=1,S(s)为总回报每次S(s)+=Gt,这样当 时,
时, ,所求的平均值V(s)就接近真实值Vπ(s)。在获得完整序列的过程中,很可能会遇到环,即一个状态点经过多次,对此MC有两种处理方法,first step(只在第一次经过时N(s)+=1)和every step(每次经过这个点都N(s)+=1)。
,所求的平均值V(s)就接近真实值Vπ(s)。在获得完整序列的过程中,很可能会遇到环,即一个状态点经过多次,对此MC有两种处理方法,first step(只在第一次经过时N(s)+=1)和every step(每次经过这个点都N(s)+=1)。
V(s)可以看做所有经过s的回报Gt取平均值产生,但是平均值计算不仅可以求和再除法,还可以通过在已有的平均值上加一点差值获得,就是下面左式的形式。但这样来看,需要一直维护一个N(s)计数器,真正优化时只需要知道一个优化的方向即可,所以用一个(0,1)常数α来代替1/N(St),即下面右式的形式。 α的现实意义是一个遗忘系数,即不需要对所有sample出的序列都记得很清楚。


2. Temporal-Difference TD(0)
Monto Carlo采样有一个很明显的缺点,就是必须要sample出完整的序列才能观测出这个序列得到的回报是多少。但是TD(0)这种方法就不需要,它利用Bellman Equation,当前状态收益只和及时回报Rt+1和下一状态收益有关(如下式),红色部分为TD target,α右边括号内为TD error。所以TD(0)只sample出下一个状态点St+1,用已有的policy计算出Rt+1和V(St+1),这种用已知来做估计的方法叫做bootstrapping,而MC是观测的实际值,是没有bootstrapping的。由于只需要sample出下一个状态,所以可以用于non-terminate序列中(incomplete)。

同MC比较,TD(0)采用已有policy预测出TD error,和MC的实际值相比有更大的偏差,但是TD(0)只需要sample出下一个状态序列而不是MC的完整序列,所以TF(0)预测获得的方差比MC小。
具体对v(s)的计算举例如下,进行8次sample,不考虑discount factor γ,下图获得的V(A)和V(B)分别是什么?
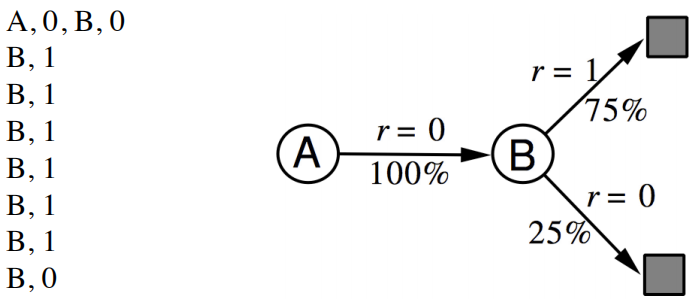
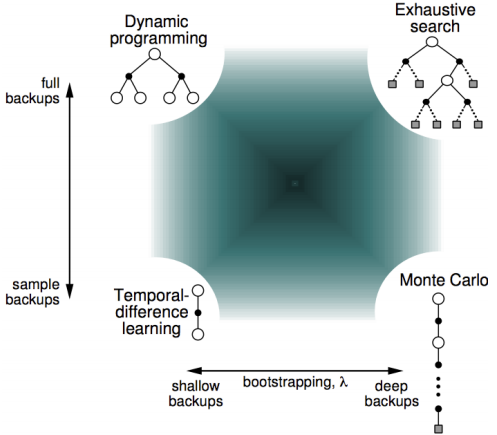
可以看出,无论是TD还是MC,v(B)都是取平均值计算出来的0.75,但是通过MC算出的V(A)是0,TD(0)算出来的是0.75。这一点来看,TD算法更能够利用Markov特性,但是只sample下一个状态点,所以比MC更shallow一些。下图显示了计算期望全部遍历的动态规划DP算法,sample采样下一个状态TD(0)算法,和sample出完整序列T-1个状态的MC算法相互间的关系,但是在1和T-1之间的诸多点,也可以sample考虑,这就是更一般的表达TD(λ)。
3. TD(λ)
这里λ是一个∈[0,1]的实数,它决定了需要采样之后的多少个状态点n,n从1到无穷大的简略表达如下,但是如何用一个实数λ来控制n呢?这里用了一个加权系数的表达,∑λ^n = 1/(1-λ),所以右式的∑=1,并且λ=0时,与TD(0)的函数表达相同。

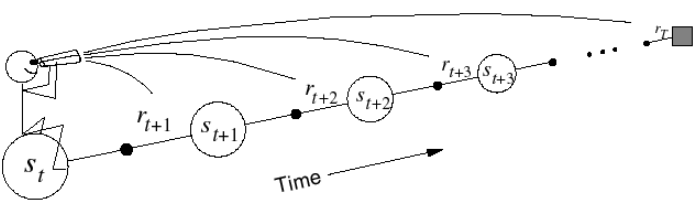
这里TD的sample分成了forward-view(下图左)和backward-view(下图右)两部分。forward-view就是刚刚叙述的往后sample n个状态点,backward是在sample的过程中,每一步都更新地维护一个Eligibility Trace,成为最后对平均值更新的权重。

这里的Eligibility Trace(下面左式),类似于青蛙跳井,每跳一下会升高,不跳的话就逐渐掉下去,既结合了frequency heuristic(跳几下),又结合了recency heuristic(什么时候跳的)。而这里的“跳”,就相当于经过状态所求点s,这样backward-view的值函数更新就可以写成下面右式的形式。当λ=0时,只有在经过s时Et(s)才为1,下面右式 结果同TD(0)表达相同;当λ=0时,整个序列中的每一个状态点有eligibility trace值会被考虑,可以看做MC。


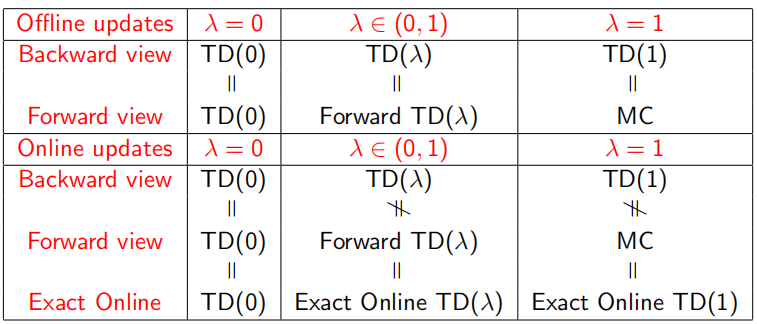
当序列环境是offline update时,即所有sample过程中不改变policy,forward-view和backward-view相同(见下式,左边可以化简到右边的形式),并且TD error可以化为λ-error的形式。


同时,TD(1)完全等同于MC。下面式子可以看出,λ=1时,Et(s)=γ^t-k,连续的TD error求和,为 ,即可看作一直sample出完整序列T-1的MC error。
,即可看作一直sample出完整序列T-1的MC error。

当序列环境是online update时,即边sample边优化policy,backward-view就会一直累积一个error,如下,所以如果访问s多次,这个error就会变得很大。

总结的一个表格如下:
二、model-free的control
因为是model-free的,没有状态转移矩阵P的相关值,所以求的是action-value function q(s, a)
1. on-policy的Monto Carlo(MC) control
留着坑,明天填。。。
【强化学习RL】model-free的prediction和control —— MC,TD(λ),SARSA,Q-learning等的更多相关文章
- 深度学习-强化学习(RL)概述笔记
强化学习(Reinforcement Learning)简介 强化学习是机器学习中的一个领域,强调如何基于环境而行动,以取得最大化的预期利益.其灵感来源于心理学中的行为主义理论,即有机体如何在环境给予 ...
- 【强化学习RL】必须知道的基础概念和MDP
本系列强化学习内容来源自对David Silver课程的学习 课程链接http://www0.cs.ucl.ac.uk/staff/D.Silver/web/Teaching.html 之前接触过RL ...
- DRL强化学习:
IT博客网 热点推荐 推荐博客 编程语言 数据库 前端 IT博客网 > 域名隐私保护 免费 DRL前沿之:Hierarchical Deep Reinforcement Learning 来源: ...
- [Reinforcement Learning] 强化学习介绍
随着AlphaGo和AlphaZero的出现,强化学习相关算法在这几年引起了学术界和工业界的重视.最近也翻了很多强化学习的资料,有时间了还是得自己动脑筋整理一下. 强化学习定义 先借用维基百科上对强化 ...
- temporal credit assignment in reinforcement learning 【强化学习 经典论文】
Sutton 出版论文的主页: http://incompleteideas.net/publications.html Phd 论文: temporal credit assignment i ...
- Reinforcement Learning 的那点事——强化学习(一)
引言 最近实验室的项目需要用到强化学习的有关内容,就开始学习起强化学习了,这里准备将学习的一些内容记录下来,作为笔记,方便日后忘记了好再方便熟悉,也可供大家参考.该篇为强化学习开篇文章,主要概括一些有 ...
- 强化学习论文(Scalable agent alignment via reward modeling: a research direction)
原文地址: https://arxiv.org/pdf/1811.07871.pdf ======================================================== ...
- EnforceLearning-被动强化学习
前言: 画图挺好:深度学习进阶之路-从迁移学习到强化学习 专家系统给出了知识节点和规则,使用粒度描述准确性,依靠分解粒度解决矛盾,并反馈知识和推理规则更新.专家系统与机器学习有本质区别,但从机器学习的 ...
- 【转载】 “强化学习之父”萨顿:预测学习马上要火,AI将帮我们理解人类意识
原文地址: https://yq.aliyun.com/articles/400366 本文来自AI新媒体量子位(QbitAI) ------------------------------- ...
随机推荐
- 机器学习——HMM & CRF
整理自: https://blog.csdn.net/woaidapaopao/article/details/77806273?locationnum=9&fps=1 HMM CRF HMM ...
- 关于CPython中set集合的无序研究
set集合本身是无序的,但是无意间发现set集合中都是数字时set貌似有序了. 无论声明这个set时数字如何摆放,输出结果总是以一种固定的顺序!同样我将dict字典的key值设为int类型,这时候字典 ...
- 2019-8-31-C#-如何写-DEBUG-输出
title author date CreateTime categories C# 如何写 DEBUG 输出 lindexi 2019-08-31 16:55:58 +0800 2018-2-13 ...
- ubuntu-wine
sudo dpkg --add-architecture i386 sudo add-apt-repository ppa:wine/wine-buildssudo apt-get update su ...
- 【Docker】镜像分层存储与镜像精简
Linux操作系统 Linux操作系统由内核空间和用户空间组成. 内核空间是kernel,用户空间是rootfs, 不同Linux发行版的区别主要是rootfs.比如 Ubuntu 14.04 使用 ...
- Nodejs模拟并发,尝试的两种解决方案
一.准备数据库表 创建商品库存表 db_stock ,插入一条数据 DROP TABLE IF EXISTS `db_stock`; CREATE TABLE `db_stock` ( `id` ) ...
- Android studio相关设置及实现存在于工程目录中的视频播放
一:相关设置 1:主题设置 File-->Settings-->Appearance &Behavior-->Appearance-->THeme 2:Java源码的颜 ...
- 最近邻分类器,K近邻分类器,线性分类器
转自:https://blog.csdn.net/oldmao_2001/article/details/90665515 最近邻分类器: 通俗来讲,计算测试样本与所有样本的距离,将测试样本归为距离最 ...
- 最详细的自定义Spring Boot Starter开发教程
1. 前言 随着Spring的日渐臃肿,为了简化配置.开箱即用.快速集成,Spring Boot 横空出世. 目前已经成为 Java 目前最火热的框架了.平常我们用Spring Boot开发web应用 ...
- 20191031-7 beta week 1/2 Scrum立会报告+燃尽图 05
此作业的要求参见:https://edu.cnblogs.com/campus/nenu/2019fall/homework/9915 git地址:https://e.coding.net/Eusti ...