【Linux】编译用于exynos4412(ARM)的Linux-3.14内核
【Linux】编译用于exynos4412(ARM)的Linux-3.14内核
零、准备
1、下载
Linux-3.14内核源代码
- 下载页面:https://www.kernel.org/pub/linux/kernel/v3.x/
- 下载链接:https://www.kernel.org/pub/linux/kernel/v3.x/linux-3.14.tar.xz
下载后得到以下文件:
yu@Yubuntu:~/kernel$ ls -l
总计 76568
-rw-rw-r-- 1 yu yu 78399152 4月 9 01:21 linux-3.14.tar.xz

2、解压
yu@Yubuntu:~/kernel$ tar -vxf linux-3.14.tar.xz
解压后得到如下文件:
yu@Yubuntu:~/kernel$ ls -l
总计 76572
drwxrwxr-x 23 yu yu 4096 3月 31 2014 linux-3.14
-rw-rw-r-- 1 yu yu 78399152 4月 9 01:21 linux-3.14.tar.xz
壹、编译
1、设置CPU架构和交叉编译器
设置CPU架构和交叉编译器的方法有几种,临时设置、通过环境变量设置和修改Makefile设置。基于实际情况,在本次编译中,我希望我把我修改好的内核发给别人同样有效,而且我只针对一种CPU指令集来配置的,所以我选择修改Makefile。
使用vi编辑Makefile:
yu@Yubuntu:~/kernel$ cd linux-3.14/
yu@Yubuntu:~/kernel/linux-3.14$ vi Makefile
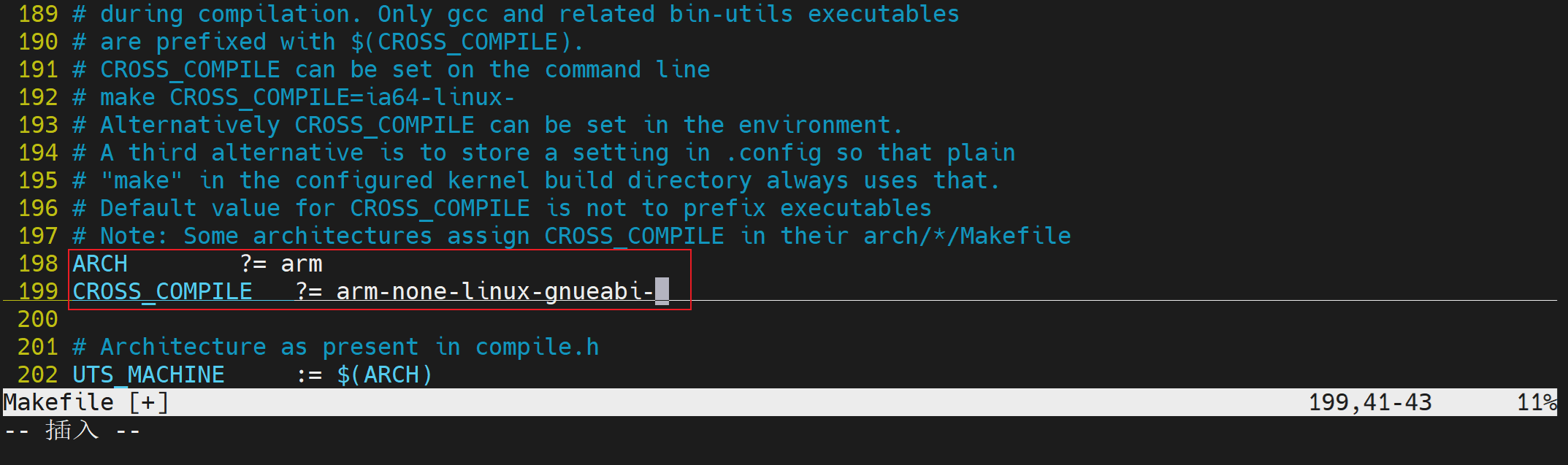
把198、199行的
ARCH ?= $(SUBARCH)
CROSS_COMPILE ?= $(CONFIG_CROSS_COMPILE:"%"=%)
改为
ARCH ?= arm
CROSS_COMPILE ?= $(CONFIG_CROSS_COMPILE:"%"=%)
保存并退出~
注:这里关于交叉编译器的安装和配置就不再介绍了。
2、设置处理器
使用如下命令设置处理器:
yu@Yubuntu:~/kernel/linux-3.14$ make exynos_defconfig
难搞,报警告了,具体情况如下:
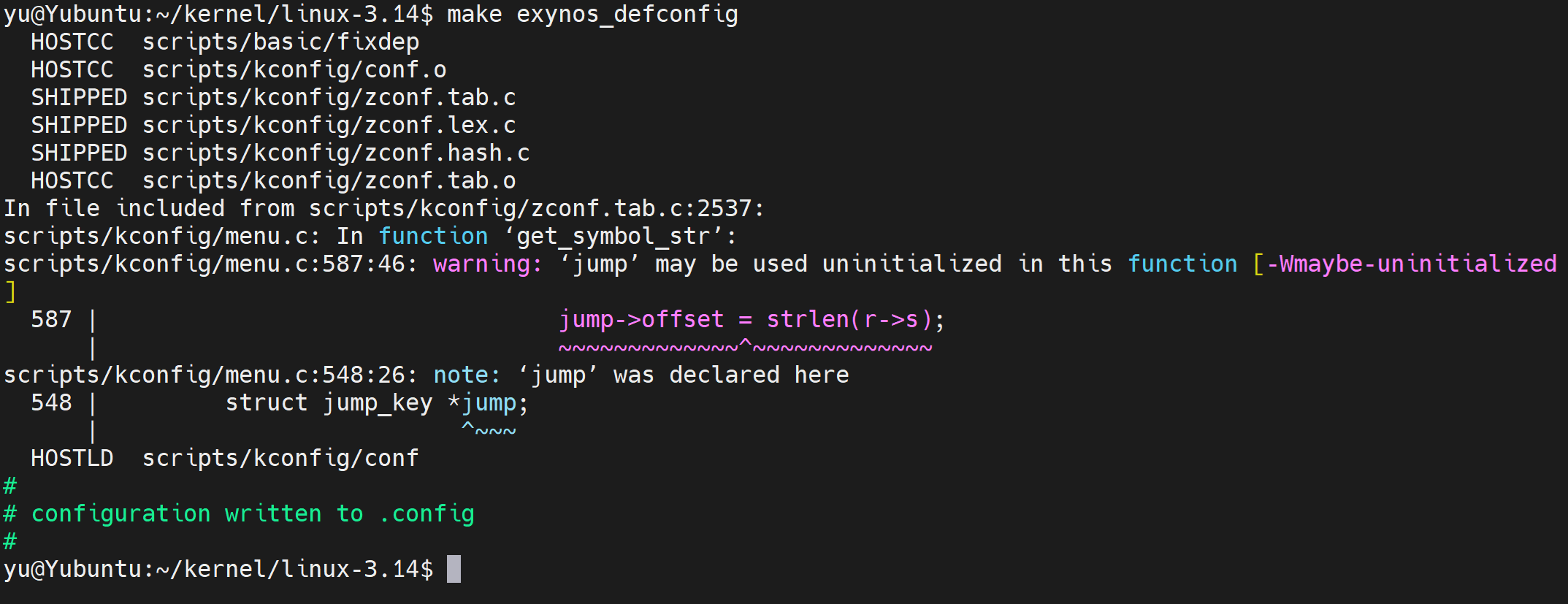
In file included from scripts/kconfig/zconf.tab.c:2537:
scripts/kconfig/menu.c: In function ‘get_symbol_str’:
scripts/kconfig/menu.c:587:46: warning: ‘jump’ may be used uninitialized in this function [-Wmaybe-uninitialized]
587 | jump->offset = strlen(r->s);
| ~~~~~~~~~~~~~^~~~~~~~~~~~~~
scripts/kconfig/menu.c:548:26: note: ‘jump’ was declared here
548 | struct jump_key *jump;
| ^~~~
没关系,Linux论坛上已有解决方案了:
https://patchwork.kernel.org/project/linux-kbuild/patch/1415098919-21836-1-git-send-email-syntheticpp@gmx.net/
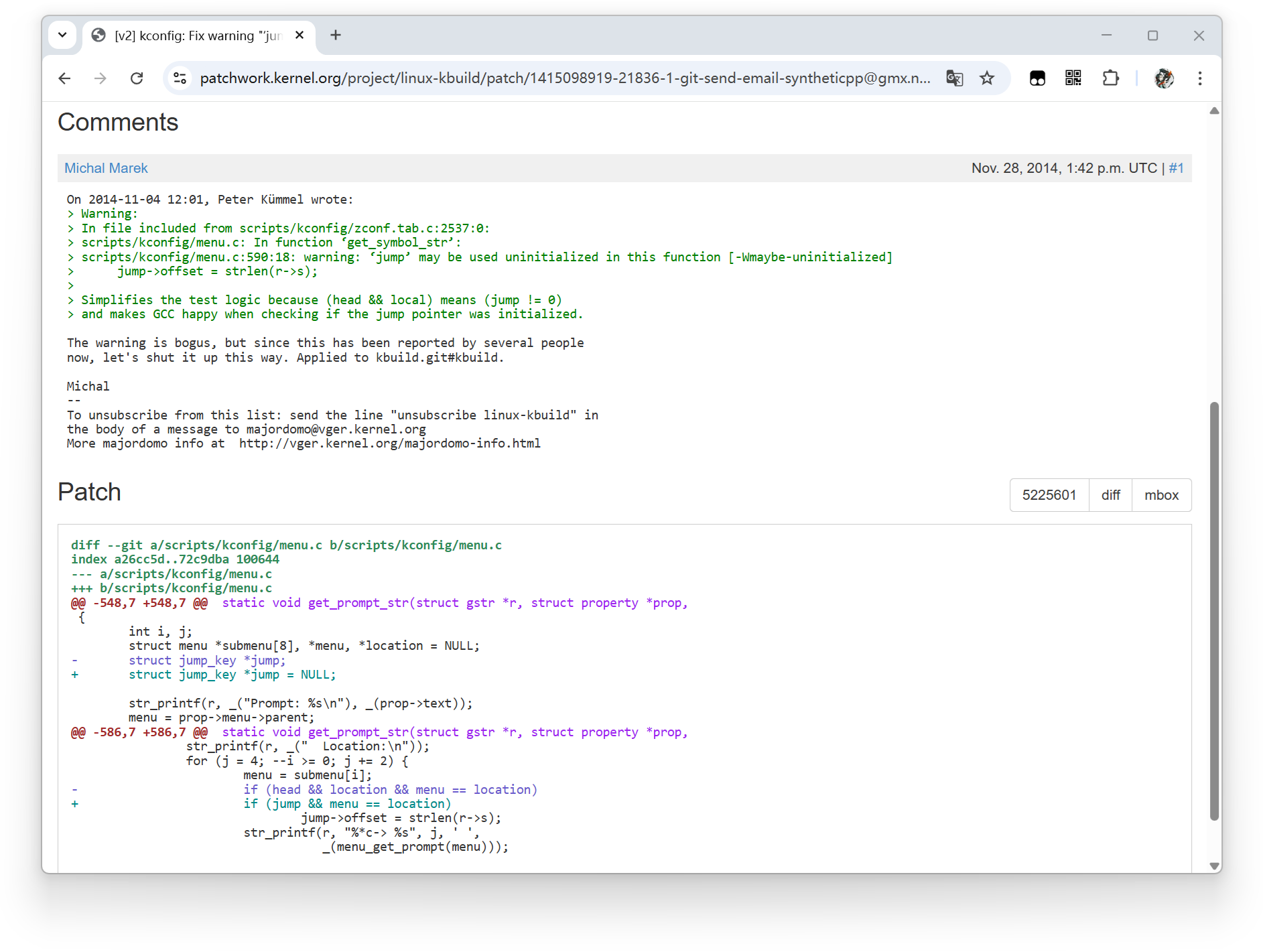
我们按照这个页面上的来修改我们的代码:
yu@Yubuntu:~/kernel/linux-3.14$ vi scripts/kconfig/menu.c
把548行的struct jump_key *jump;改为struct jump_key *jump = NULL;:
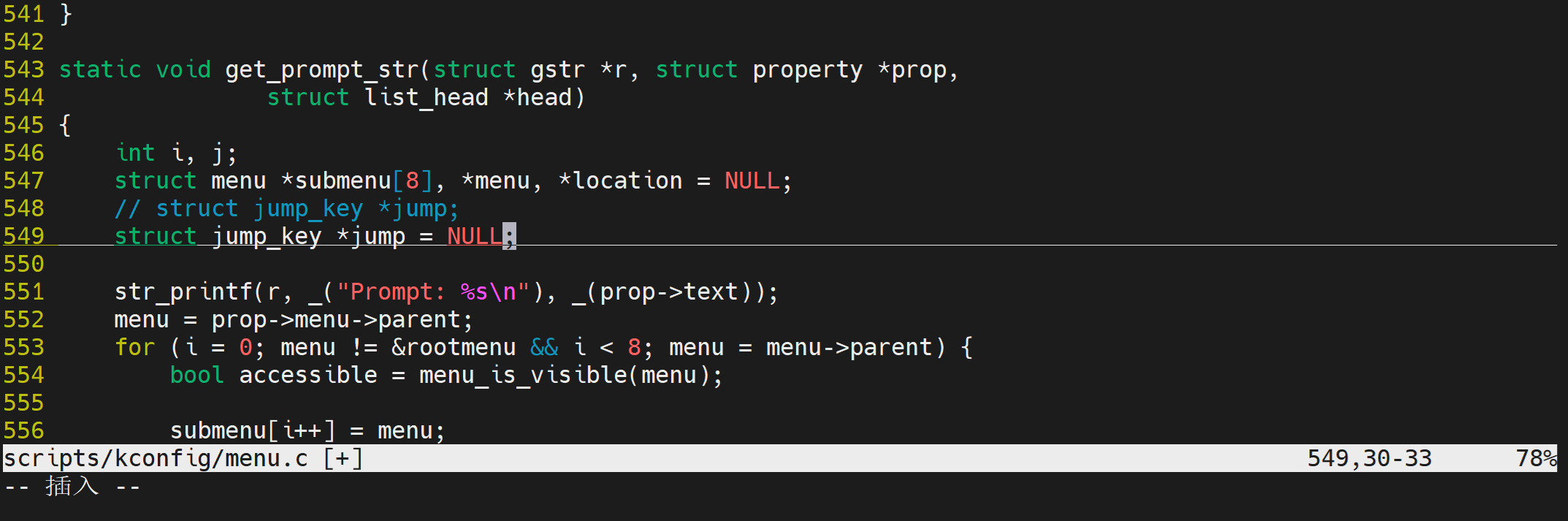
把586行的if (head && location && menu == location)改为if (jump && menu == location)(由于我上一个修改我是注释掉原有行,再在下面添加的新行,所以这边我的第二个位置显示的是587行了):
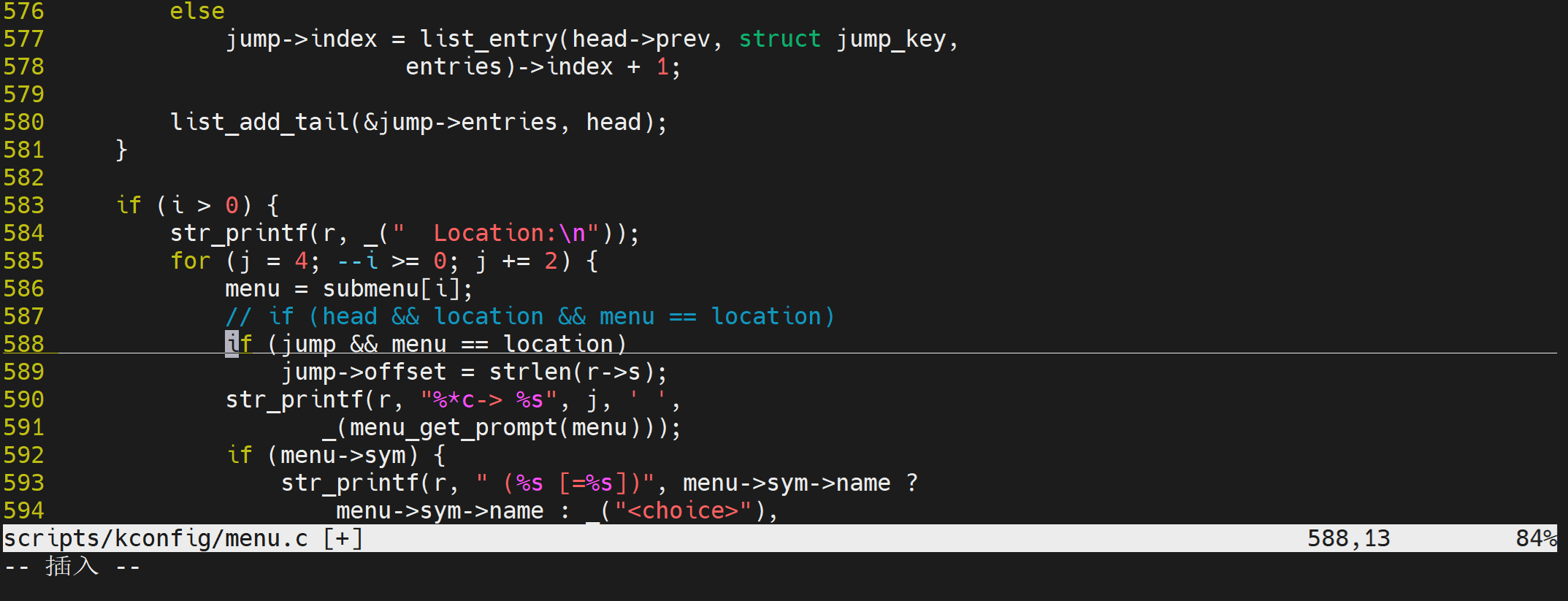
保存退出~
重新使用如下命令设置处理器:
yu@Yubuntu:~/kernel/linux-3.14$ make exynos_defconfig

搞定!
3、配置Linux系统内核
Linux系统内核的配置文件在上一个步骤中,被我们写到了.config文件中了,感兴趣的同学可以打开看看,很复杂,新手不建议修改。对于大多数情况,我们可以使用Linux内核源码这边给我们提供的配置工具来配置,配置工具在README中有介绍,大致有这么些:
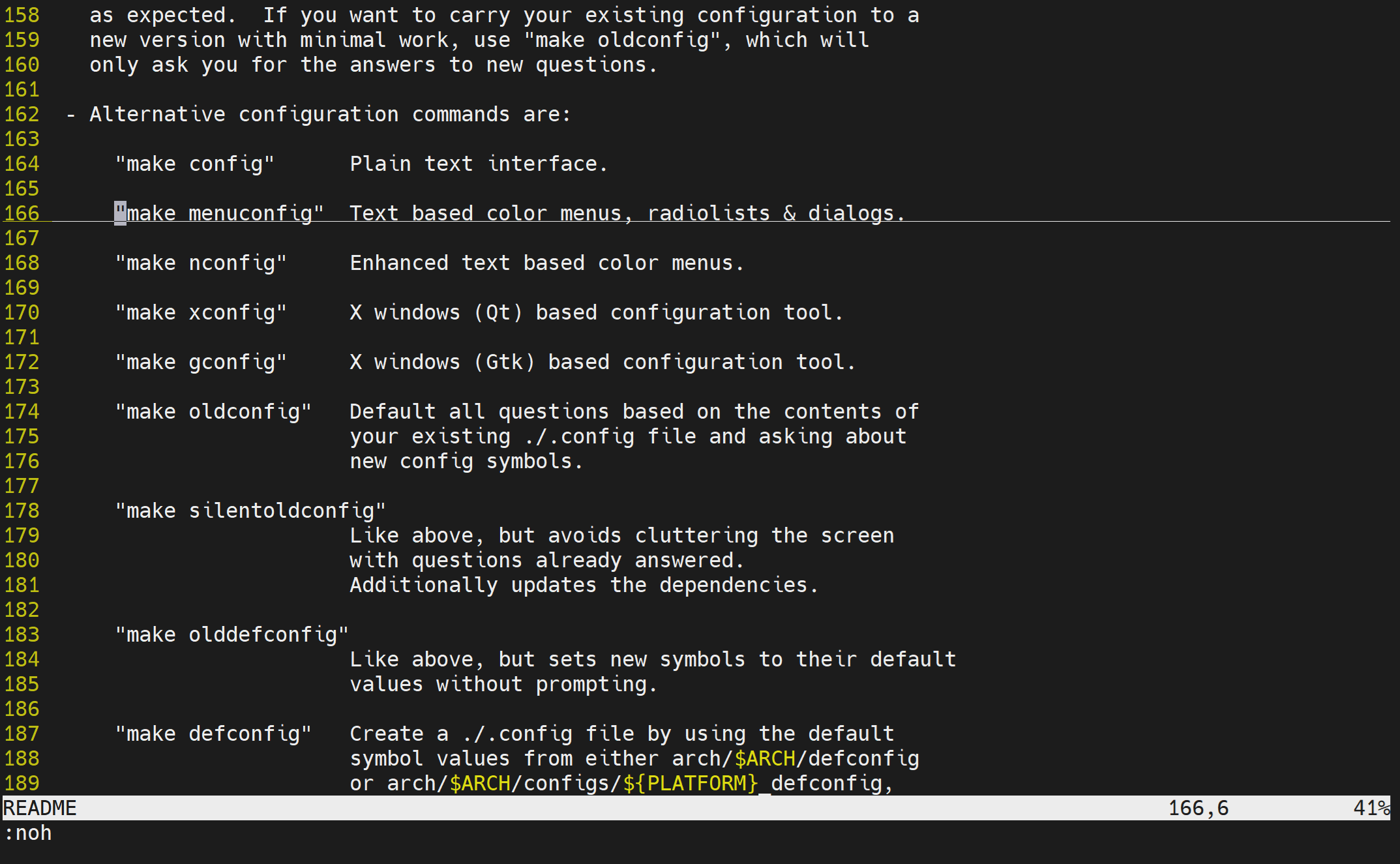
其中,我们比较常用的是make menuconfig,对于远程使用SSH连接的同学友好些。
但是它需要一些依赖,可以使用如下命令安装对应的依赖:
sudo apt-get install libncurses5-dev
libncurses5-dev是一个基于文本的GUI开发库,用于支持在C等编程语言中开发基于文本终端的交互式应用程序,提供了屏幕绘制、键盘输入处理等功能。
另外,make menuconfig对屏幕大小有一定要求,把当前命令窗口拉伸到最大后执行如下命令开始配置:
yu@Yubuntu:~/kernel/linux-3.14$ make menuconfig
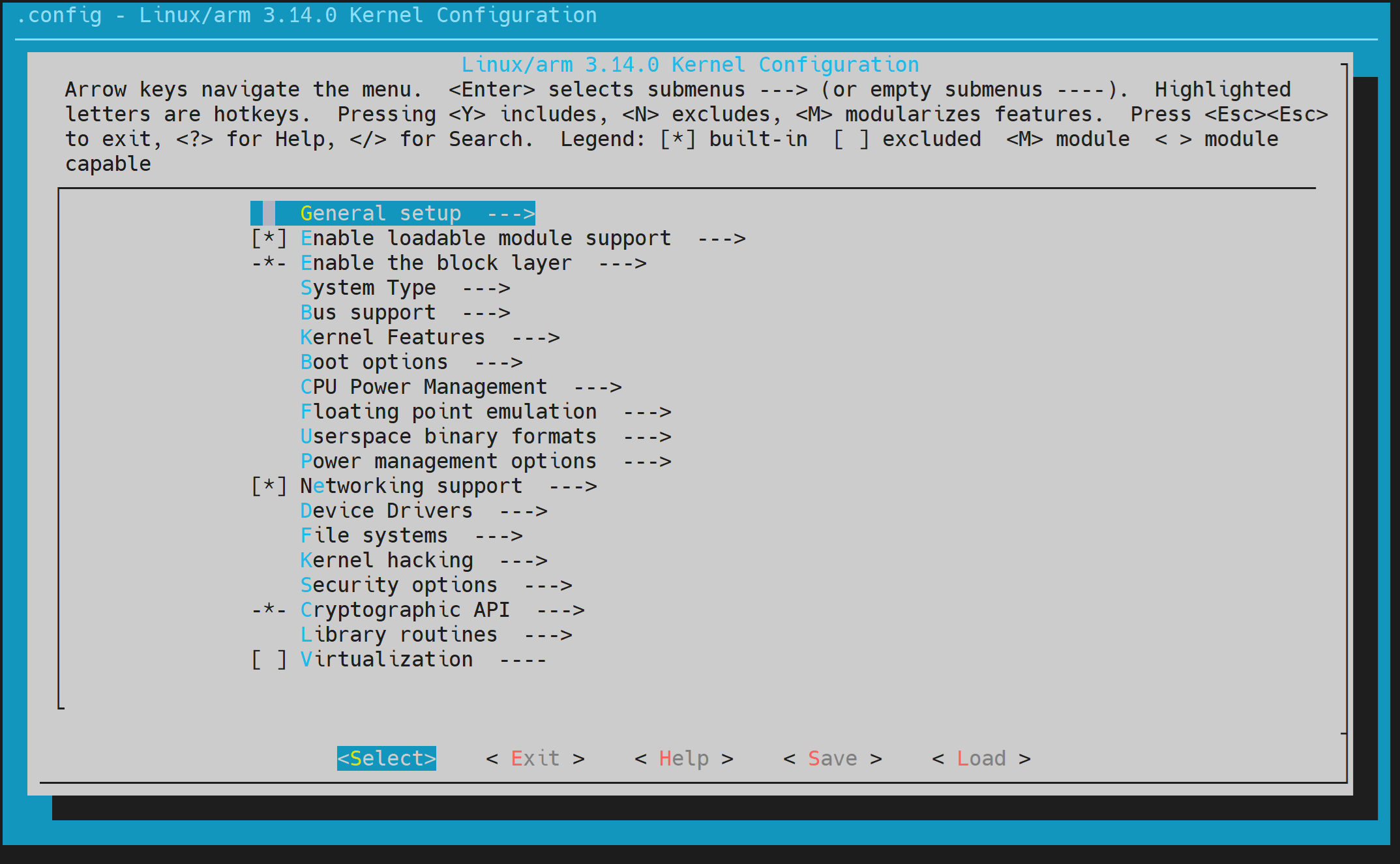
界面上方的文本即是使用帮助,同学们可以自己阅读一下,本文不介绍如何配置Linux内核,同学们根据自己的需要在此界面修改好Linux内核配置后再往下。
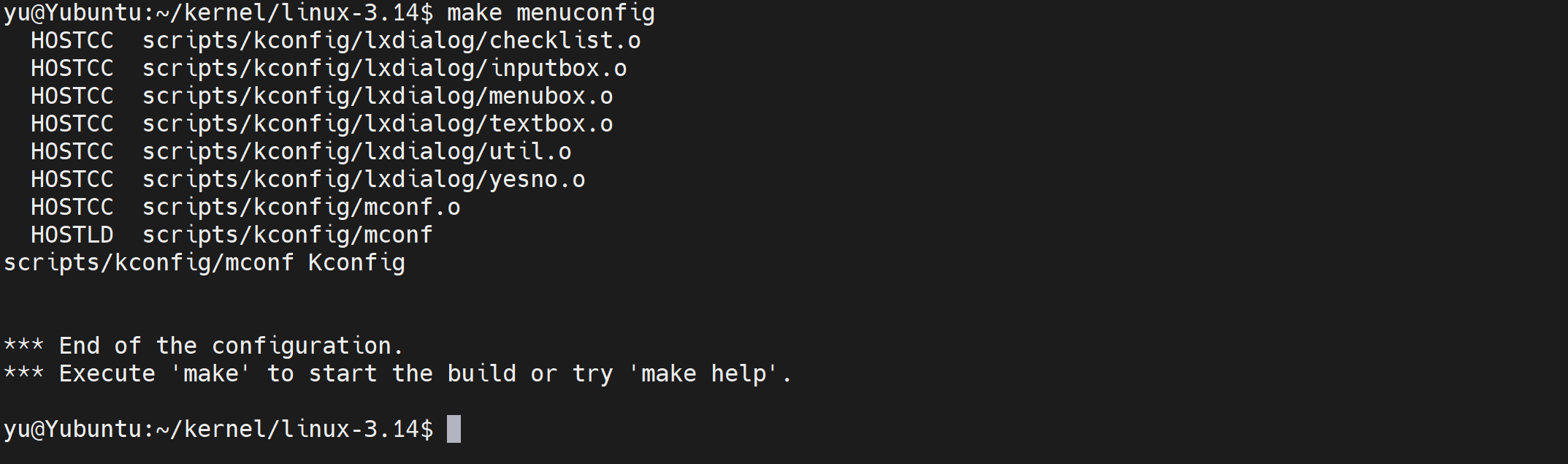
配置并保存成功~
4、编译Linux系统内核
因为是针对的exynos4412编译的Linux内核,而exynos4412使用的引导程序是U-Boot,所以把编译好的Linux内核文件封装成uImage格式是比较好的选择。
uImage是一种经过封装的内核镜像格式,它在嵌入式系统中较为常用,特别是使用U-Boot作为引导加载器的系统。这种格式在普通的内核镜像基础上添加了一个头部信息,该头部信息包含了镜像的加载地址、入口地址、镜像大小等内容,便于U-Boot识别和加载内核。
命令make uImage的意思是让make工具依据Makefile里的规则来构建uImage格式的内核镜像。
那么,我们执行如下代码开始编译Linux系统内核:
yu@Yubuntu:~/kernel/linux-3.14$ make uImage
难搞,刚开始编译就报错了:
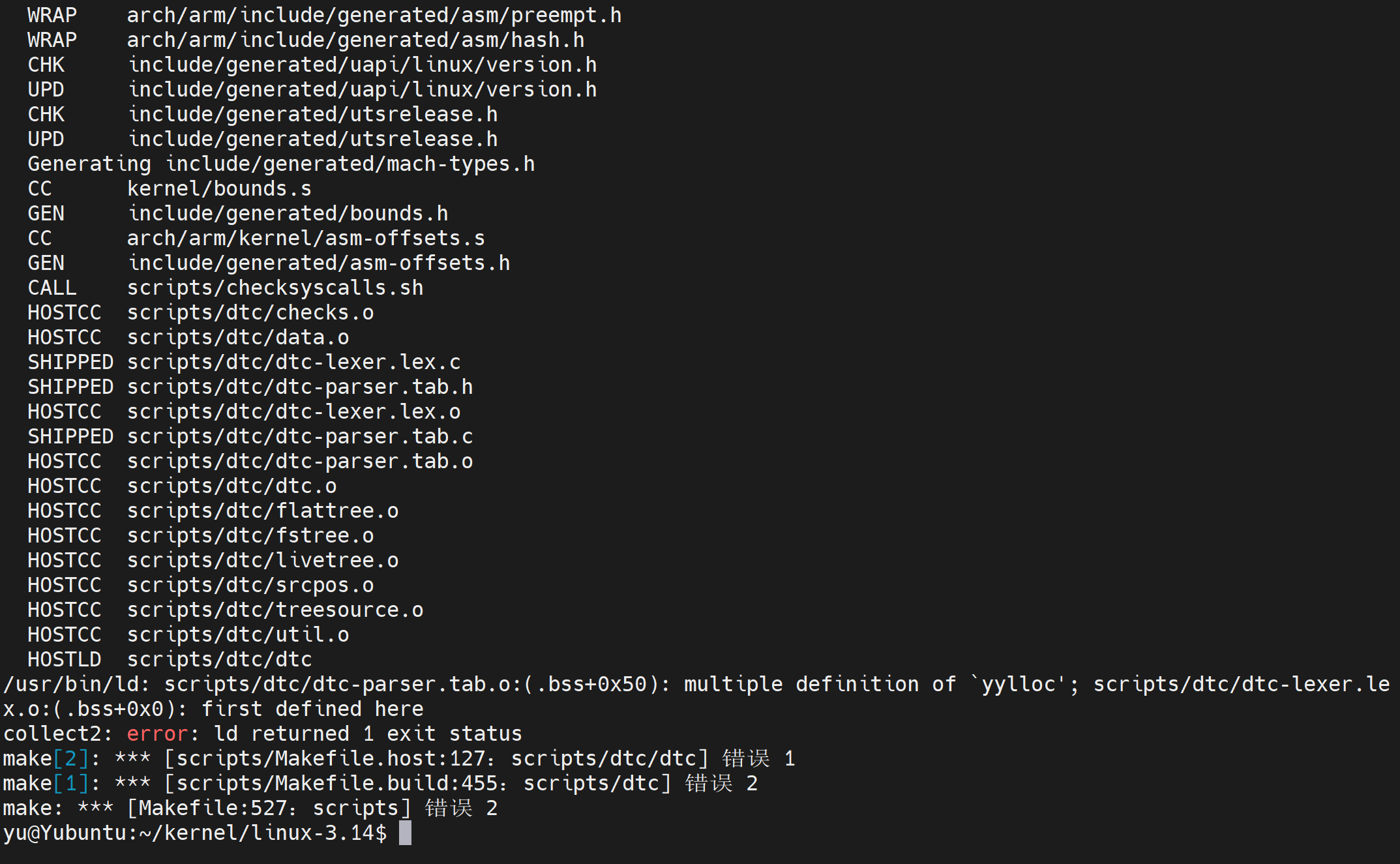
/usr/bin/ld: scripts/dtc/dtc-parser.tab.o:(.bss+0x50): multiple definition of `yylloc'; scripts/dtc/dtc-lexer.lex.o:(.bss+0x0): first defined here
collect2: error: ld returned 1 exit status
make[2]: *** [scripts/Makefile.host:127:scripts/dtc/dtc] 错误 1
make[1]: *** [scripts/Makefile.build:455:scripts/dtc] 错误 2
make: *** [Makefile:527:scripts] 错误 2
经查询,是因为GCC版本太高了导致的,我们可以稍作修改,使用如下命令编辑dtc-lexer.lex.c_shipped文件:
yu@Yubuntu:~/kernel/linux-3.14$ vi scripts/dtc/dtc-lexer.lex.c_shipped
在640行,在YYLTYPE yylloc;前面加上extern,即把YYLTYPE yylloc;改为extern YYLTYPE yylloc;:
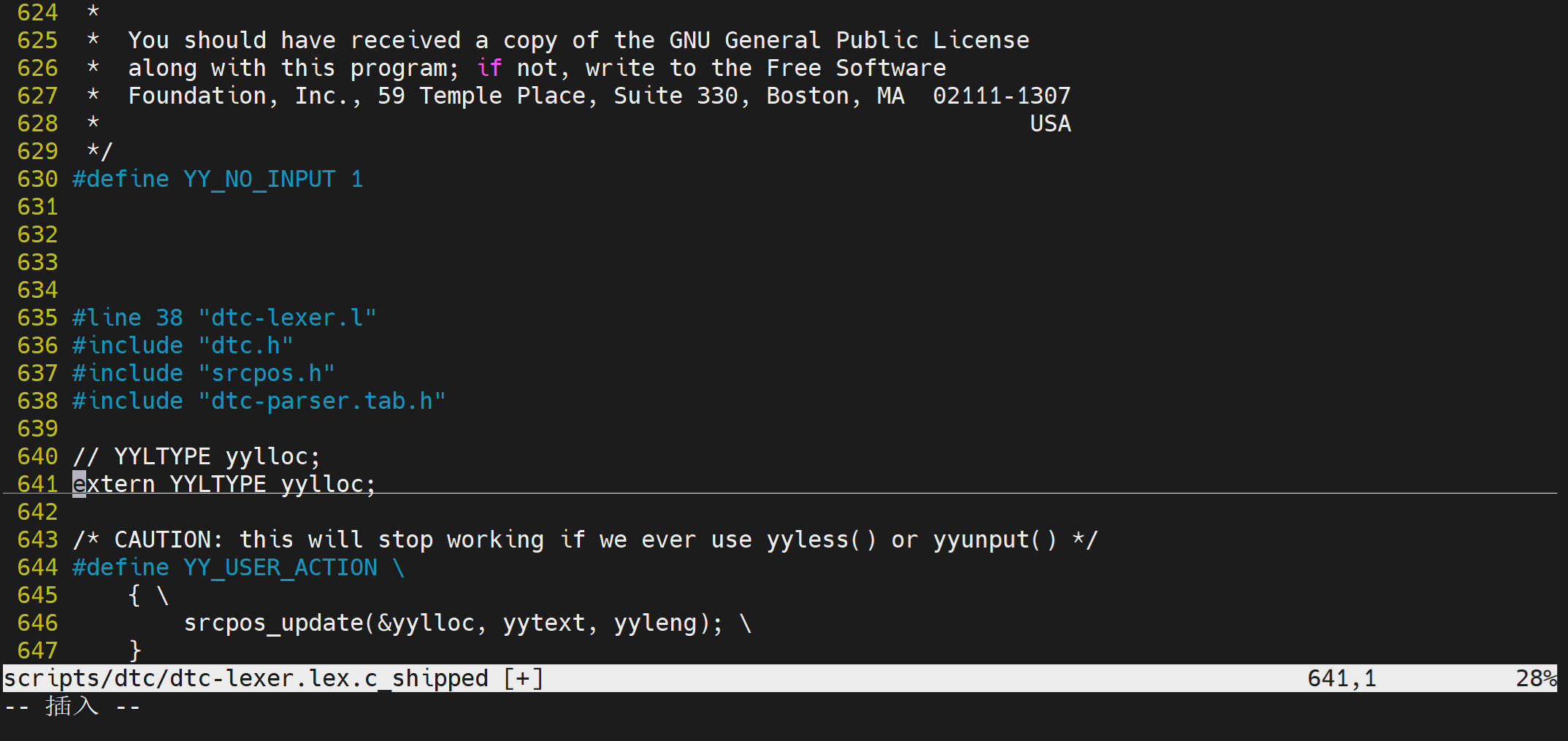
保存并退出。
重新编译:
yu@Yubuntu:~/kernel/linux-3.14$ make uImage
好,这次编译了大概3分钟,现在又又出错了:
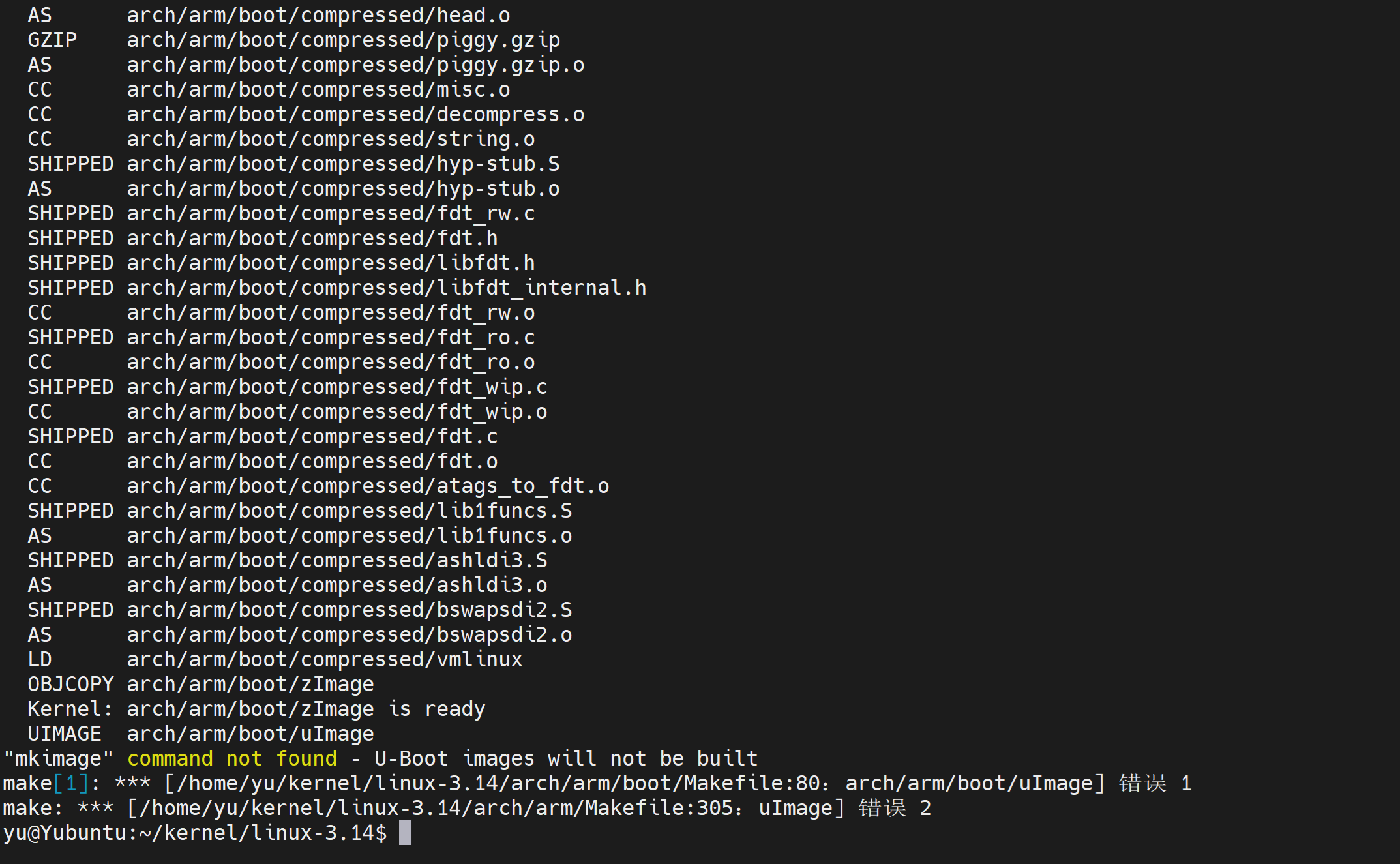
"mkimage" command not found - U-Boot images will not be built
make[1]: *** [/home/yu/kernel/linux-3.14/arch/arm/boot/Makefile:80:arch/arm/boot/uImage] 错误 1
make: *** [/home/yu/kernel/linux-3.14/arch/arm/Makefile:305:uImage] 错误 2
本次出错的原因在于找不到mkimage命令,我们需要安装U-Boot工具(u-boot-tools),这个是用于U-Boot引导加载程序的辅助工具集,可帮助我们进行U-Boot的配置、编译、调试以及映像文件处理等工作。
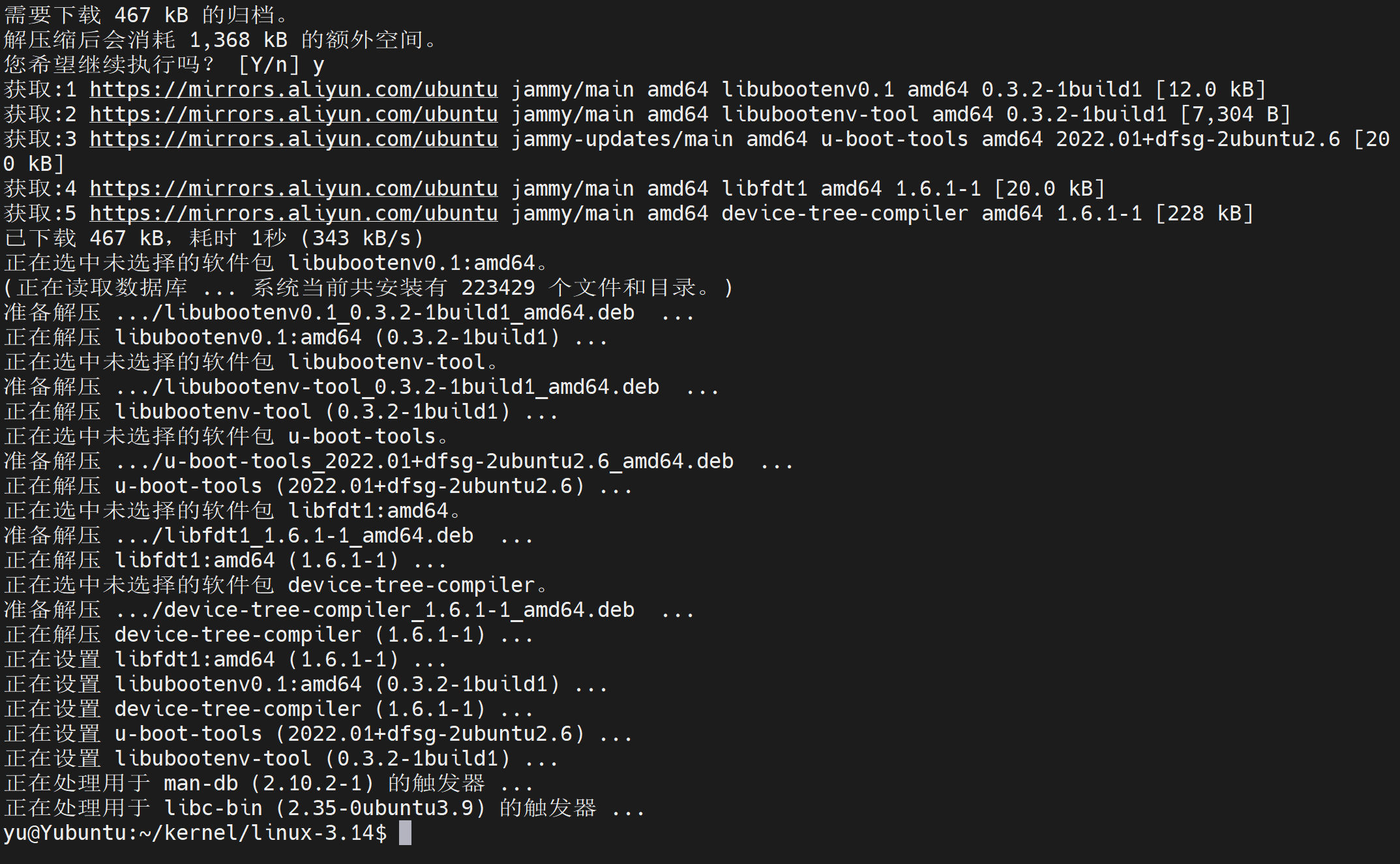
我们使用如下命令安装U-Boot工具:
sudo apt-get install u-boot-tools
好,继续编译:
yu@Yubuntu:~/kernel/linux-3.14$ make uImage
经过大约4分钟,编译完成~
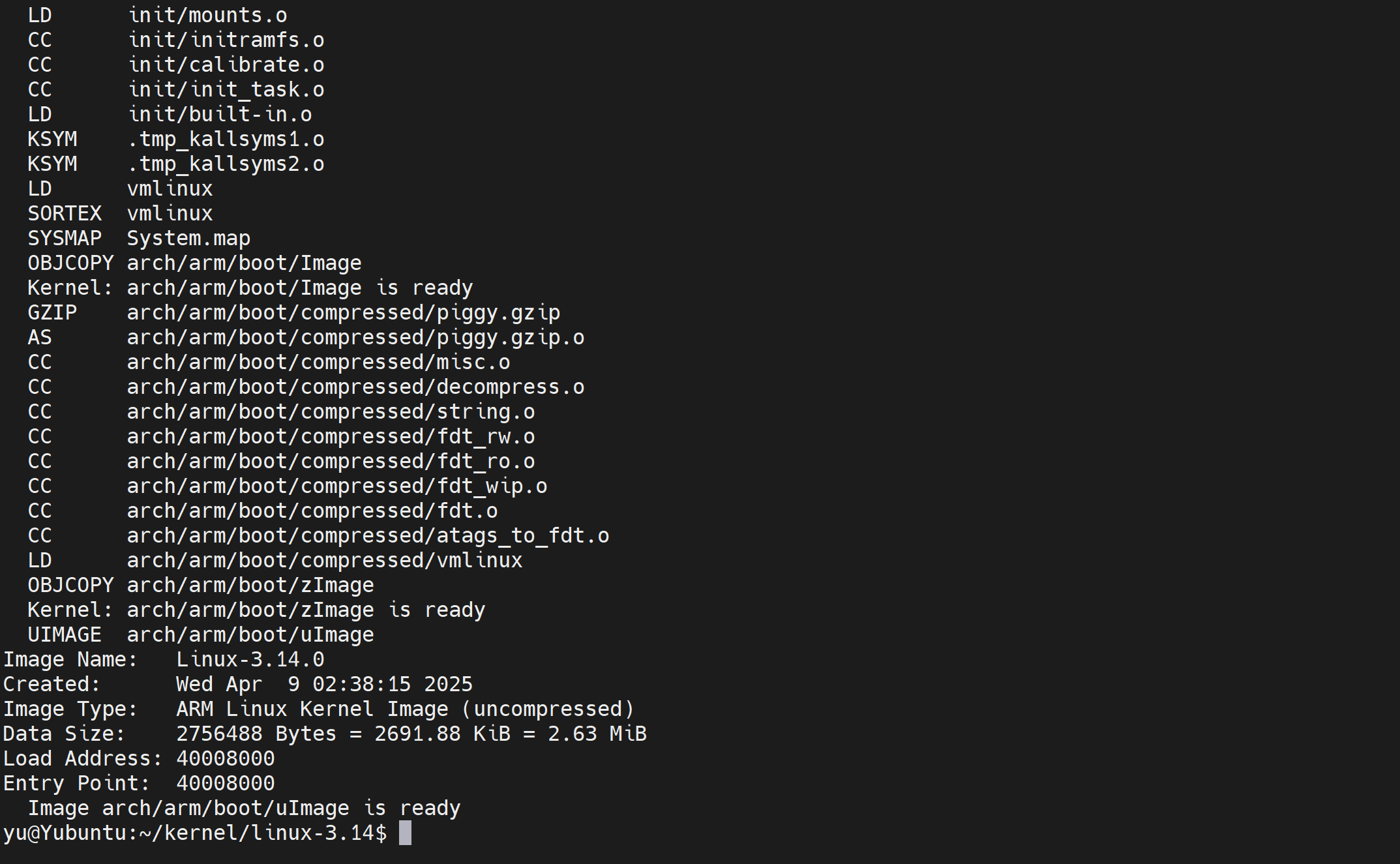
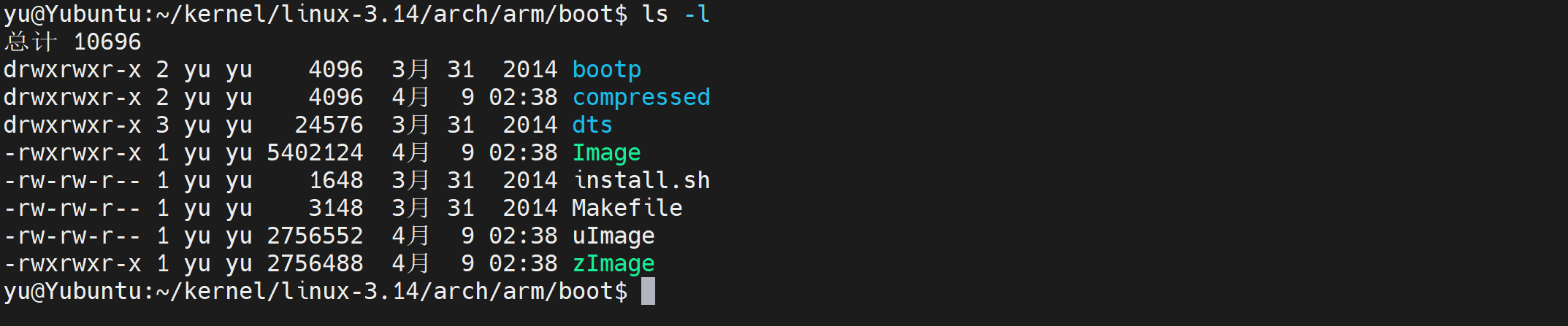
编译好的文件在arch/arm/boot目录下:
5、编译内核模块
在使用make menuconfig配置Linux内核时,有的功能被设置为模块(M),模块不会在上一个步骤被编译进内核,我们需要单独编译,使用如下命令开始编译内核模块:
yu@Yubuntu:~/kernel/linux-3.14$ make modules
编译内核模块成功:
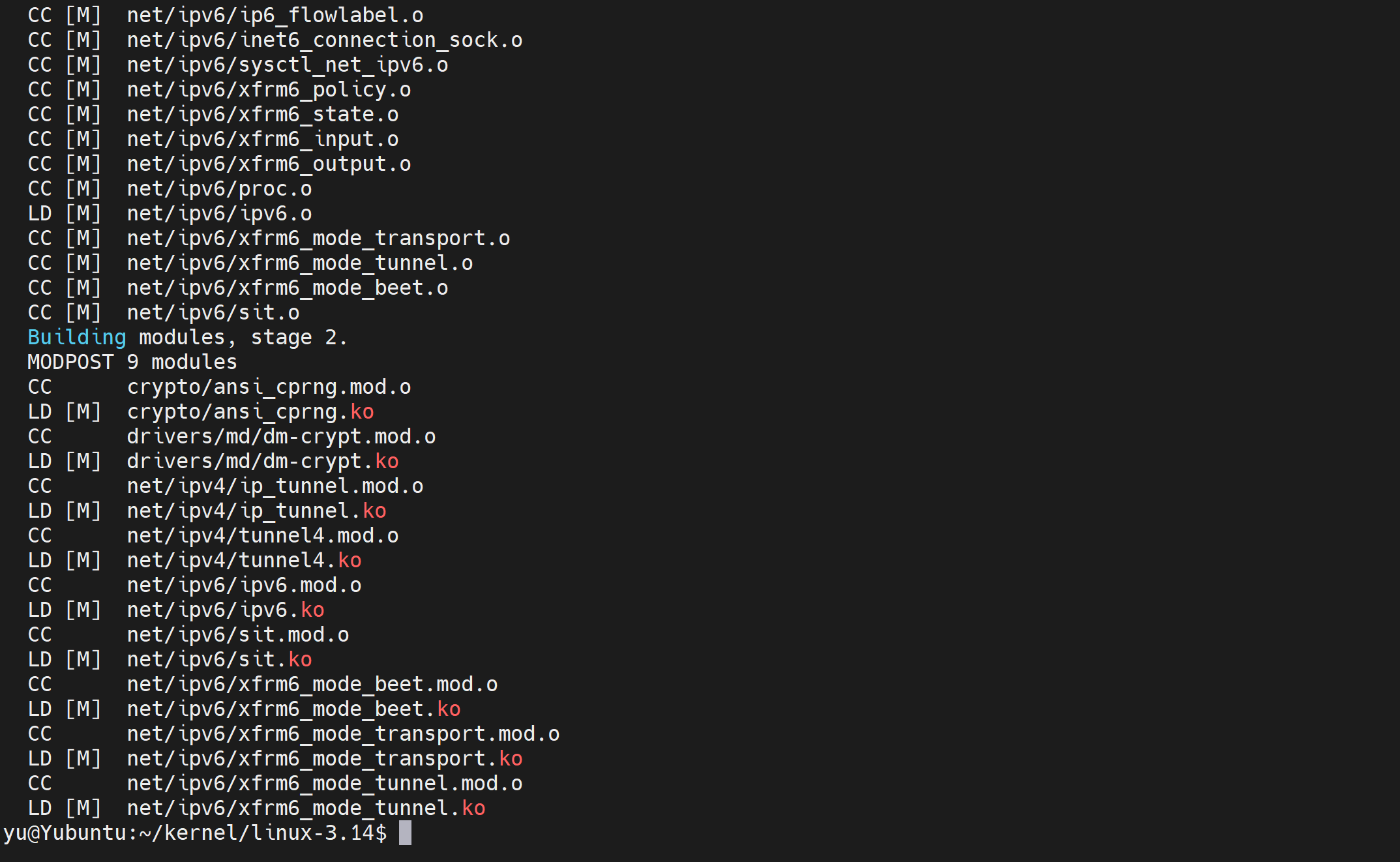
其中,以.ko结尾的即为内核模块(Kernel Object)文件。
我们将来在Linux中可以使用insmod或modprobe命令来加载.ko内核模块,使用rmmod 命令卸载内核模块。
6、查看编译耗时
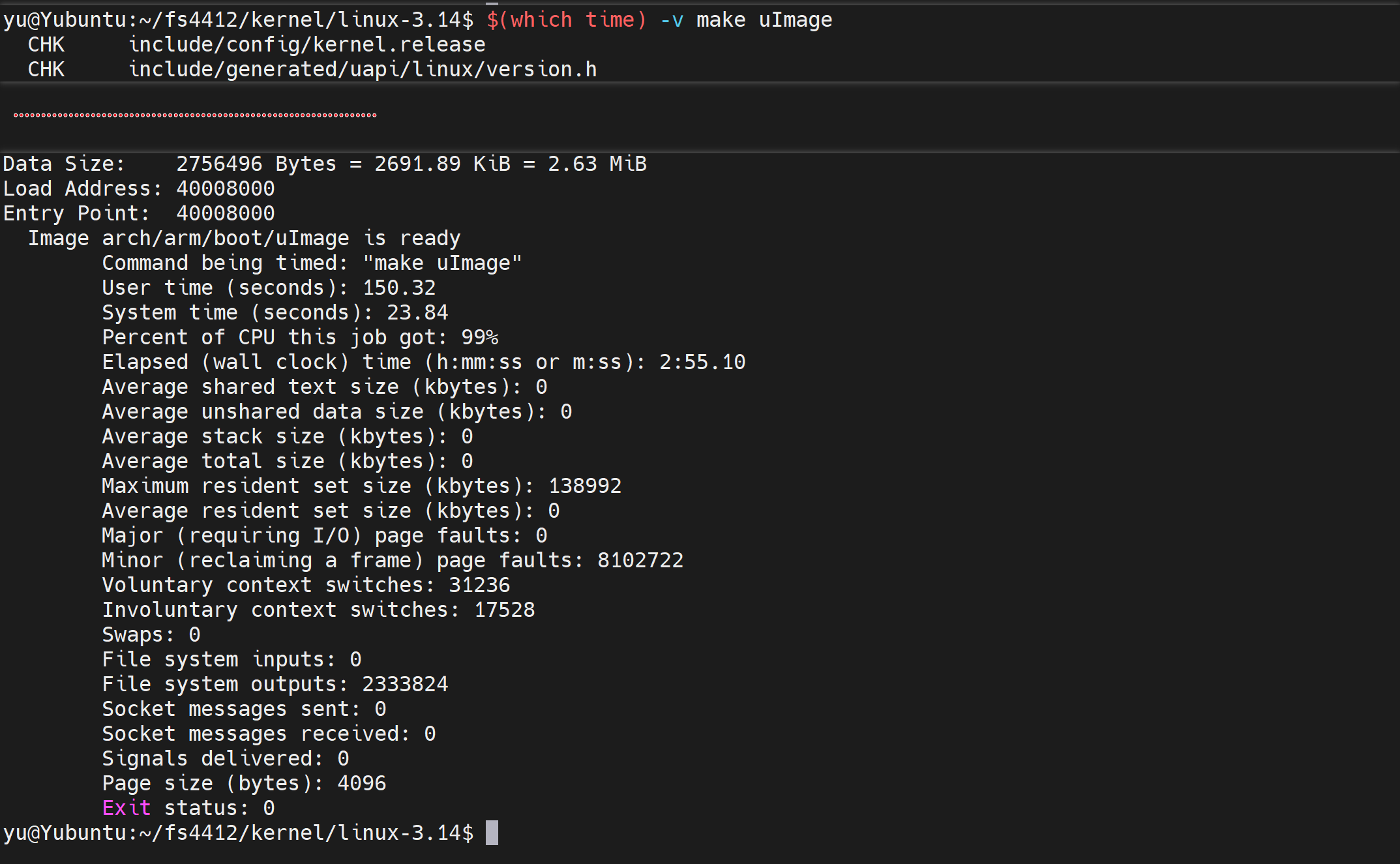
使用如下命令可以查看编译耗时:
yu@Yubuntu:~/kernel/linux-3.14$ $(which time) -v make uImage
贰、参考资料
- https://patchwork.kernel.org/project/linux-kbuild/patch/1415098919-21836-1-git-send-email-syntheticpp@gmx.net/
- https://www.kernel.org/pub/linux/kernel/v3.x/
- https://www.kernel.org/
- https://blog.csdn.net/zhoukaiqili/article/details/126191871
- https://blog.csdn.net/eibo51/article/details/51901480
【Linux】编译用于exynos4412(ARM)的Linux-3.14内核的更多相关文章
- 调试exynos4412—ARM嵌入式Linux—LEDS/GPIO驱动之二
/** ****************************************************************************** * @author 暴走的小 ...
- 调试exynos4412—ARM嵌入式Linux—LEDS/GPIO驱动之三
/** ****************************************************************************** * @author 暴走的小 ...
- 调试exynos4412—ARM嵌入式Linux—LEDS/GPIO驱动之一
/** ****************************************************************************** * @author 暴走的小 ...
- 【Linux编译环境的搭建】Linux都没有,怎么学Linux编程?
本文准备从0开始,一步步搭建一套属于自己的多节点Linux系统环境,这将是后续学Linux.用Linux.Linux环境编程.应用和项目部署.工具实验等一系列学习和实践的基石,希望对小伙伴们有帮助. ...
- 浅析基于ARM的Linux下的系统调用的实现
在Linux下系统调用是用软中断实现的,下面以一个简单的open例子简要分析一下应用层的open是如何调用到内核中的sys_open的. t8.c 1: #include <stdio.h> ...
- Linux时间子系统(十七) ARM generic timer驱动代码分析
一.前言 关注ARM平台上timer driver(clocksource chip driver和clockevent chip driver)的驱动工程师应该会注意到timer硬件的演化过程.在单 ...
- Linux编译移植Qt4的环境_在OMAPL138平台
Linux编译Qt4的环境_OMAPL138 手里有一块创龙OMAPL138的板子,我要在上面成功移植Qt环境和触摸屏幕,这是我第二次进行Linux的Qt环境移植,发现了很多问题,需要重新整理. 我编 ...
- Linux编译移植Qt5的环境_Xillinx的ZYNQ平台
Linux编译Qt环境 2017年的十一假期,足不出户,一个人在教研室里面搞Qt的移植.我手里面有Samsung的CortexA8,Samsung的 CortexA53还有Ti的Sitara系列的AM ...
- arm驱动linux异步通知与异步IO【转】
转自:http://blog.csdn.net/chinazhangzhong123/article/details/51638793 <[ arm驱动] linux异步通知与 异步IO> ...
- linux —— 编译linux内核
目录: 0.测试环境 1.获得最新内核源代码 2.编译源代码 3.运行新的内核 0.测试环境: 我的系统 : ubuntu 16.04 LTS (内核版本:4.4.0-36-generic ...
随机推荐
- redis-总结列表
基础 启动命令 redis-server kconfig/redis.conf 通过指定的配置文件启动服务(kconfig/redis.conf是复制过来的) redis-cli -p 6379 使用 ...
- C# Winform 通过 NAudio 获取控制电脑操作系统音量
https://github.com/naudio/NAudio NAudio 是一个开源的 .NET 音频库,由 Mark Heath 开发,开源地址:https://github.com/naud ...
- 低成本高可用方案!Linux系统下SQL Server数据库镜像配置全流程详解
低成本高可用方案!Linux系统下SQL Server数据库镜像配置全流程详解 背景 最近遇到一个客户需求,客户的生产环境有大量的SQL Server数据库(大概180套),客户的诉求是需要把生产环境 ...
- 报错sql_mode=only_full_group_by
这个问题的原因是,在这种模式下,sql分组时默认只能select + 分组字段以及聚合函数,相当于做一个规范检查 但很多时候并不需要这个检查,因为真实sql中,分组后很多字段是1对1的,比如分组id, ...
- 第一!天翼云领跑中国边缘云laaS市场!
近日,弗若斯特沙利文(Frost & Sullivan,简称"沙利文")联合头豹研究院发布<2023年中国边缘云市场报告>,天翼云在2023H1中国边缘云Iaa ...
- VS2022编译项目出现““csc.exe”已退出,代码为 -1073741819”的错误解决办法
1.问题描述 编译出错如下图所示: 2.解决办法 在NuGet包中输入Microsoft.Net.Compilers,安装该包,安装完后重新生成就不报错了,如下图所示:
- 在私有化部署的 Gitlab 实例中开启内置的容器镜像仓库
版本 极狐 GitLab v16.1.2-jh 步骤 如果使用 Let's Encrpt 集成,容器镜像仓库功能自动开启,访问地址为 your-gitlab-domain:5050. 否则,默认不开启 ...
- ABB工业机器人控制柜IRC5维修具体细节
对于ABB机器人维修工作,需要具备专业的知识和技能,同时遵循维修步骤和注意事项.通过加强预防措施和建议的实施,可以有效降低ABB工业机器人控制柜IRC5的故障率,提高ABB工业机器人的整体运行效率. ...
- KUKA库卡机器人保养维修
KUKA机器人由机械手和控制柜组成,每日机器人保养包括:控制箱.教导盒.手腕之表面擦拭,还有噴槍之清洁. KUKA机器人控制柜保养1)断掉控制柜的所有供电电源.2)检查主机板.存储板.计算板.以及驱动 ...
- Linux - centos6.6升级openssh9.7p1
一.注意事项 1.任何会被修改的配置文件都要提前备份 2.每一步操作都要记录 3.提前预演,知道可能遇到的问题,以及对应的解决方法,能够在生产环境上升级时,更快完成操作. 4.一开始用来操作的ssh会 ...