【算法】BILSTM+CRF中的条件随机场
BILSTM+CRF中的条件随机场
tensorflow中crf关键的两个函数是训练函数tf.contrib.crf.crf_log_likelihood和解码函数tf.contrib.crf.viterbi_decode
crf_log_likelihood(inputs, tag_indices, sequence_lengths, transition_params=None)
Computes the log-likelihood of tag sequences in a CRF.
Args:
inputs: A [batch_size, max_seq_len, num_tags] tensor of unary potentials
to use as input to the CRF layer.
tag_indices: A [batch_size, max_seq_len] matrix of tag indices for which we
compute the log-likelihood.
sequence_lengths: A [batch_size] vector of true sequence lengths.
transition_params: A [num_tags, num_tags] transition matrix, if available.
Returns:
log_likelihood: A scalar containing the log-likelihood of the given sequence
of tag indices.
transition_params: A [num_tags, num_tags] transition matrix. This is either
provided by the caller or created in this function.
viterbi_decode(score, transition_params)
Decode the highest scoring sequence of tags outside of TensorFlow.
This should only be used at test time.
Args:
score: A [seq_len, num_tags] matrix of unary potentials.
transition_params: A [num_tags, num_tags] matrix of binary potentials.
Returns:
viterbi: A [seq_len] list of integers containing the highest scoring tag
indicies.
viterbi_score: A float containing the score for the Viterbi sequence.
看着这两个函数定义,我懵逼了。在看完了李航的《统计学习方法》后,我以为我可以轻松搞定bilstm+crf中的crf。然而对着这两个函数发呆了半天,发现怎么跟书上的理论对不上号?特征函数呢?转移函数呢?怎么训练完之后就只有个transition_params,维度还是num_tags x num_tags。这是什么东西。
郁闷的在网上找资料,终于看到了参考资料里面的讲解,总算是醍醐灌顶看懂了。这里记录一下。
bilstm和crf的作用
在bilstm+crf结构中,bilstm的输出已经是各个标签取值的概率了,crf的作用仅仅是根据标签间的关系做结果调整。借用参考资料里的图片
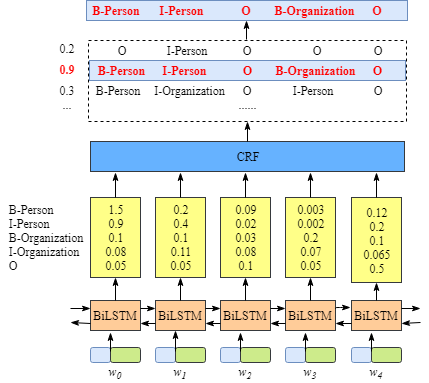
那么,bilstm已经输出标签取值概率了,为什么还需要crf层呢。因为直接用bilstm输出的标签有些并不合理,比如B-Person,I-Organization就是一个不合理的序列。crf做的就是在bilstm输出的基础上,调整输出标签,使得标签结果顺序更为合理。
crf细节
与之前介绍的标准形式相似,在条件\(x\)的情况下,序列\(y\)出现的概率\(P(y|x)\)可以表达为:
\]
\(e^s\)是当前序列的分数,分母是所有序列分数的和。
可以对比一下之前介绍crf那篇的公式,到这里跟传统的crf都是一样的,只是表达上现在的公式化简了一些。
下面就是和前一篇不同的地方了,区别就在于\(s\)。在之前的介绍中,\(s\)由状态特征函数和转移特征函数组成,并有各自的权重。而bilstm+crf中的crf其\(s\)的组成要简单很多。
先介绍两个重要变量:
\(EmissionScore\): bilstm输出的每个位置是各个标签的概率。是一个\(seq\_len\times num\_tags\)的矩阵。如上图黄色矩形部分。
\(TransitionScore\): 标签间的转移概率。是一个\(num\_tags\times num\_tags\)的矩阵
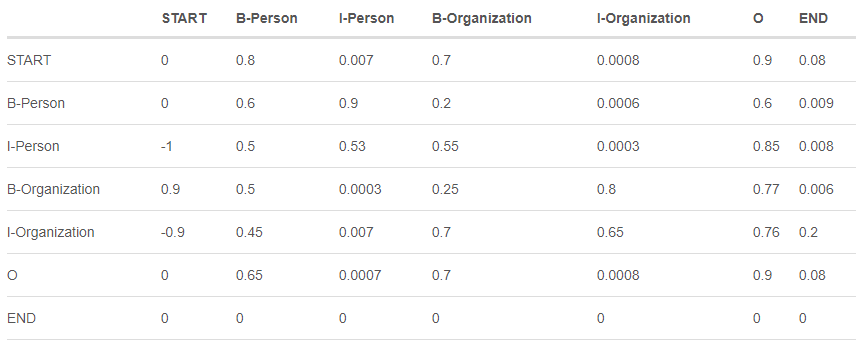
上面矩阵的含义是,如果前一个标签是START,而后一个标签为B-Person的概率为0.8,而START后接I-Organization的概率只有0.0008。这是符合人们的认知的。
这样,就可以介绍\(s_i\)的组成了。
\]
对于序列来说,比如有一个序列是“START B-Person I-Person O B-Organization O END”,则
\]
\]
\]
看到这里就知道bilstm之上的crf与普通crf的区别了。普通crf的样本概率受特征函数和相关权值的影响。而bilstm上的crf则没有特征函数,也没有权值,结果受bilstm层输出的各个位置标签概率,以及标签间的状态转移矩阵影响。对于bilstm+crf的crf层来说,要学习的就只有标签间状态转移矩阵而已。
看到这,再对应tensorflow的函数定义,就很明白了。
crf_log_likelihood函数输出的transition_params,就是要求解的状态转移矩阵。
viterbi_decode(score, transition_params),就是通过bilstm的输出score和求解的状态转移矩阵transition_params来解码最终结果。
参考资料
- https://createmomo.github.io/2017/09/12/CRF_Layer_on_the_Top_of_BiLSTM_1/
- https://createmomo.github.io/2017/09/23/CRF_Layer_on_the_Top_of_BiLSTM_2/
- https://createmomo.github.io/2017/10/08/CRF-Layer-on-the-Top-of-BiLSTM-3/
- https://createmomo.github.io/2017/10/17/CRF-Layer-on-the-Top-of-BiLSTM-4/
- https://createmomo.github.io/2017/11/11/CRF-Layer-on-the-Top-of-BiLSTM-5/
- https://createmomo.github.io/2017/11/24/CRF-Layer-on-the-Top-of-BiLSTM-6/
【算法】BILSTM+CRF中的条件随机场的更多相关文章
- 【机器学习】【条件随机场CRF-2】CRF的预测算法之维特比算法(viterbi alg) 详解 + 示例讲解 + Python实现
1.CRF的预测算法条件随机场的预测算法是给定条件随机场P(Y|X)和输入序列(观测序列)x,求条件概率最大的输出序列(标记序列)y*,即对观测序列进行标注.条件随机场的预测算法是著名的维特比算法(V ...
- 标注-CRF条件随机场
1 概率无向图模型1.1 模型定义1.2 因子分解2 条件随机场的定义2.2 条件随机场的参数化形式2.3 条件随机场的简化形式2.4 条件随机场的矩阵形式 3 条件随机场的概率计算问题 3.1 前向 ...
- 条件随机场CRF
条件随机场(CRF)是给定一组输入随机变量X的条件下另一组输出随机变量Y的条件概率分布模型,其特点是假设输出随机变量构成马尔科夫随机场.实际上是定义在时序数据上的对数线性模型.条件随机场属于判别模型. ...
- 高级教程: 作出动态决策和 Bi-LSTM CRF 重点
动态 VS 静态深度学习工具集 Pytorch 是一个 动态 神经网络工具包. 另一个动态工具包的例子是 Dynet (我之所以提这个是因为使用 Pytorch 和 Dynet 是十分类似的. 如果你 ...
- bi-Lstm +CRF 实现命名实体标注
1. https://blog.csdn.net/buppt/article/details/82227030 (Bilstm+crf中的crf详解,包括是整体架构) 2. 邹博关于CRF的讲解视频 ...
- Viterbi(维特比)算法在CRF(条件随机场)中是如何起作用的?
之前我们介绍过BERT+CRF来进行命名实体识别,并对其中的BERT和CRF的概念和作用做了相关的介绍,然对于CRF中的最优的标签序列的计算原理,我们只提到了维特比算法,并没有做进一步的解释,本文将对 ...
- 条件随机场CRF(三) 模型学习与维特比算法解码
条件随机场CRF(一)从随机场到线性链条件随机场 条件随机场CRF(二) 前向后向算法评估标记序列概率 条件随机场CRF(三) 模型学习与维特比算法解码 在CRF系列的前两篇,我们总结了CRF的模型基 ...
- 条件随机场CRF(二) 前向后向算法评估标记序列概率
条件随机场CRF(一)从随机场到线性链条件随机场 条件随机场CRF(二) 前向后向算法评估标记序列概率 条件随机场CRF(三) 模型学习与维特比算法解码 在条件随机场CRF(一)中我们总结了CRF的模 ...
- 【算法】CRF(条件随机场)
CRF(条件随机场) 基本概念 场是什么 场就是一个联合概率分布.比如有3个变量,y1,y2,y3, 取值范围是{0,1}.联合概率分布就是{P(y2=0|y1=0,y3=0), P(y3=0|y1= ...
随机推荐
- servlet(3):servlet和filter<url-pattern>配置
一,servlet容器对url的匹配过程: 当 一个请求发送到servlet容器的时候,容器先会将请求的url减去tomcat的上下文路径(配置的访问系统的基础路径例如intellij idea配置的 ...
- iptables 限制ip访问3306端口
*filter:INPUT DROP [0:0] #全部关闭:FORWARD ACCEPT [0:0]:OUTPUT ACCEPT [0:0]-A INPUT -s 172.4.4.14 -p tc ...
- BZOJ1112[POI2008]砖块Klo——非旋转treap
题目描述 N柱砖,希望有连续K柱的高度是一样的. 你可以选择以下两个动作 1:从某柱砖的顶端拿一块砖出来,丢掉不要了. 2:从仓库中拿出一块砖,放到另一柱.仓库无限大. 现在希望用最小次数的动作完成任 ...
- Python unittest 测试输入(input)和输出(print)
Python 自带的 unittest 库可以用来写单元测试. 测试输入输出的解决方法是: 将标准输入输出定向到一个StringIO类(python3是 io.StringIO). import un ...
- Alice and Bob HDU - 4111 (SG函数)
Alice and Bob are very smart guys and they like to play all kinds of games in their spare time. The ...
- CF1157A-Reachable Numbers题解
原题地址 题目大意:有一个函数\(f(x)\),效果是将\(x+1\)后,去掉末尾所有的\(0\),例如: \(f(599)=6\),因为\(599+1=600→60→6\) \(f(7)=8\),因 ...
- python三大器(装饰器/生成器/迭代器)
1装饰器 1.1基本结构 def 外层函数(参数): def 内层函数(*args,**kwargs); return 参数(*args,**kwargs) return 内层函数 @外层函数 def ...
- Linux之vi编辑器
vi编辑器是Linux系统下标准的编辑器.而且不逊色于其他任何最新的编辑器.可是会用的有多少呢.下面介绍一下vi编辑器的简单用法和部分命令.让你在Linux系统中畅行无阻. 基本上vi可以分为三种状态 ...
- 洛伦兹曲线(Lorenz curve)提升指数、提升表和提升图
sklearn实战-乳腺癌细胞数据挖掘 https://study.163.com/course/introduction.htm?courseId=1005269003&utm_campai ...
- (八) Usb摄像头描述符解析
目录 Usb摄像头描述符解析 总结 参考资料 打印设备描述符 打印配置描述符 打印接口联合体描述符 打印接口描述符 打印当前设置的额外描述符 代码解析额外的描述符 打印端点描述符 title: Usb ...