Opencv3 Robert算子 Sobel算子 拉普拉斯算子 自定义卷积核——实现渐进模糊
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
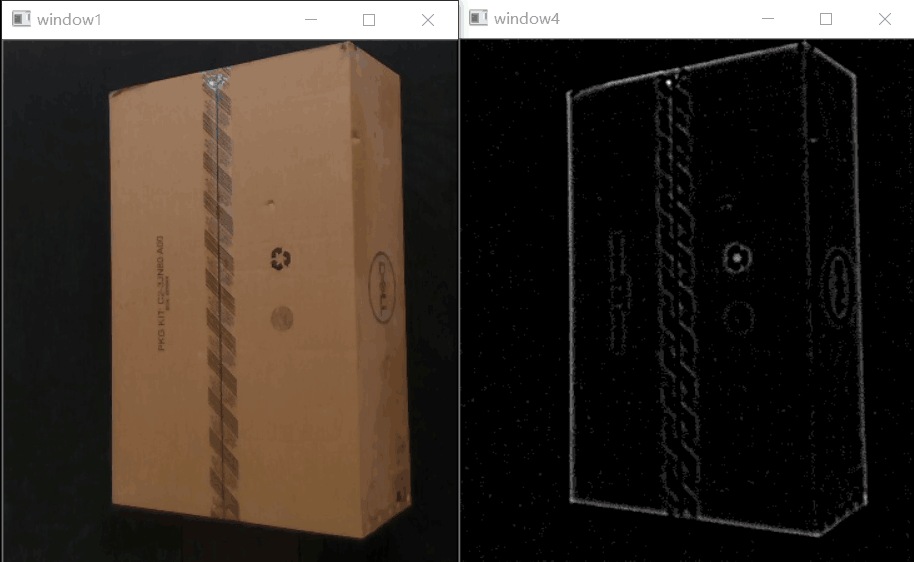
//Robert算子
int Demo_Robert()
{
char win1[] = "window1";
char win2[] = "window2";
char win3[] = "window3";
Mat img1, img2, img3, kernel_x, kernel_y;
img1 = imread("D://images//box//0019-00.jpg");
if (img1.empty())
{
cout << "could not load image..."<< endl;
return 0;
}
imshow(win1,img1);
//X方向—Robert算子
kernel_x = (Mat_<int>(2,2)<<1,0,0,-1);
filter2D(img1,img2,-1,kernel_x,Point(-1,-1),0,0);
//Y方向—Robert算子
kernel_y = (Mat_<int>(2, 2) << 0, 1, -1, 0);
filter2D(img1, img3, -1, kernel_y, Point(-1, -1), 0, 0);
imshow(win2, img2);
imshow(win3, img3);
return 0;
}
//Sobel算子
int Demo_Sobel()
{
char win1[] = "window1";
char win2[] = "window2";
char win3[] = "window3";
Mat img1, img2, img3, kernel_x, kernel_y;
img1 = imread("D://images//box//0019-00.jpg");
if (img1.empty())
{
cout << "could not load image..." << endl;
return 0;
}
imshow(win1, img1);
//X方向—Sobel算子
kernel_x = (Mat_<int>(3, 3) << -1,0,1,-2,0,2,-1,0,1);
filter2D(img1, img2, -1, kernel_x, Point(-1, -1), 0, 0);
//Y方向—Sobel算子
kernel_y = (Mat_<int>(3, 3) << -1,-2,-1,0,0,0,1,2,1);
filter2D(img1, img3, -1, kernel_y, Point(-1, -1), 0, 0);
imshow(win2, img2);
imshow(win3, img3);
return 0;
}
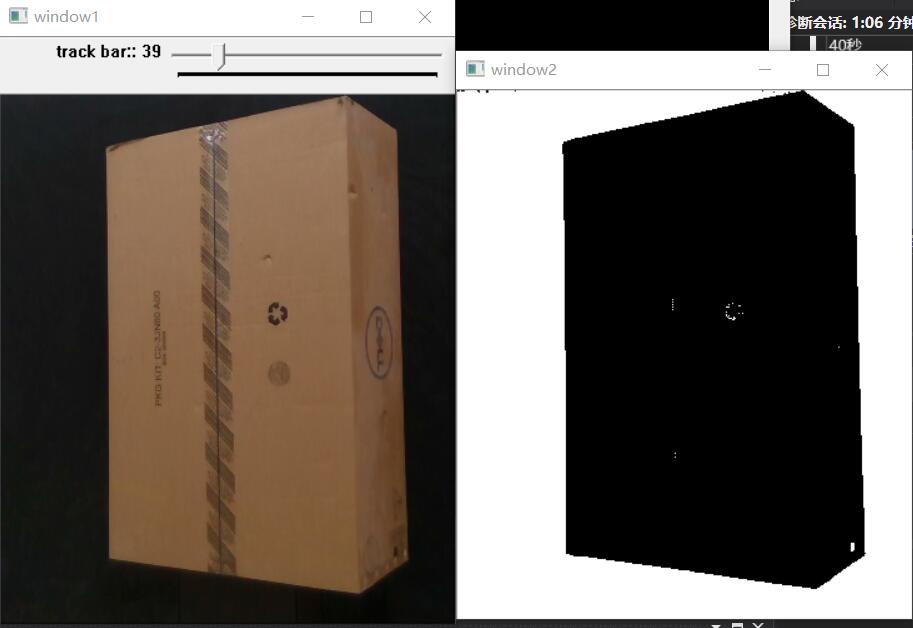
//拉普拉斯算子
int Demo_Laplace()
{
char win1[] = "window1";
char win2[] = "window2";
char win3[] = "window3";
Mat img1, img2, img3, kernel_x, kernel_y;
img1 = imread("D://images//box//0019-00.jpg");
if (img1.empty())
{
cout << "could not load image..." << endl;
return 0;
}
imshow(win1, img1);
//Laplace算子
kernel_x = (Mat_<int>(3, 3) << 0, -1, 0, -1, 4, -1, 0, -1, 0);
filter2D(img1, img2, -1, kernel_x, Point(-1, -1), 0, 0);
imshow(win2, img2);
return 0;
}
//自定义卷积核——实现渐进模糊
int Demo_Kernel()
{
char win1[] = "window1";
char win2[] = "window2";
char win3[] = "window3";
Mat img1, img2, img3, kernel_x, kernel_y;
img1 = imread("D://images//box//0019-00.jpg");
if (img1.empty())
{
cout << "could not load image..." << endl;
return 0;
}
imshow(win1, img1);
int c = 0;
int index = 0;
int ksize = 3;
while (true)
{
c = waitKey(600);
if ((char)c==27)
{
break;
}
ksize = 4 + (index % 5) * 2 + 1;
Mat kernel1 = Mat::ones(Size(ksize,ksize),CV_32F)/(float)(ksize*ksize);
filter2D(img1,img2,-1,kernel1,Point(-1,-1));
index++;
imshow(win2,img2);
}
imshow(win2, img2);
return 0;
}
int main()
{
//Demo_Robert();
//Demo_Sobel();
//Demo_Laplace();
Demo_Kernel();
waitKey(0);
return 0;
}
Opencv3 Robert算子 Sobel算子 拉普拉斯算子 自定义卷积核——实现渐进模糊的更多相关文章
- 【OpenCV】边缘检测:Sobel、拉普拉斯算子
推荐博文,博客.写得很好,给个赞. Reference Link : http://blog.csdn.net/xiaowei_cqu/article/details/7829481 一阶导数法:梯度 ...
- 【OpenCV新手教程之十二】OpenCV边缘检測:Canny算子,Sobel算子,Laplace算子,Scharr滤波器合辑
本系列文章由@浅墨_毛星云 出品,转载请注明出处. 文章链接:http://blog.csdn.net/poem_qianmo/article/details/25560901 作者:毛星云(浅墨) ...
- [ZZ] 边缘检测 梯度与Roberts、Prewitt、Sobel、Lapacian算子
http://blog.csdn.net/swj110119/article/details/51777422 一.学习心得: 学习图像处理的过程中,刚开始遇到图像梯度和一些算子的概念,这两者到底是什 ...
- 机器学习进阶-图像梯度计算-scharr算子与laplacian算子(拉普拉斯) 1.cv2.Scharr(使用scharr算子进行计算) 2.cv2.laplician(使用拉普拉斯算子进行计算)
1. cv2.Scharr(src,ddepth, dx, dy), 使用Scharr算子进行计算 参数说明:src表示输入的图片,ddepth表示图片的深度,通常使用-1, 这里使用cv2.CV_6 ...
- [OpenCV入门教程之十二】OpenCV边缘检测:Canny算子,Sobel算子,Laplace算子,Scharr滤波器合辑
http://blog.csdn.net/poem_qianmo/article/details/25560901 本系列文章由@浅墨_毛星云 出品,转载请注明出处. 文章链接:http://blog ...
- 边缘检测:Canny算子,Sobel算子,Laplace算子
1.canny算子 Canny边缘检测算子是John F.Canny于 1986 年开发出来的一个多级边缘检测算法.更为重要的是 Canny 创立了边缘检测计算理论(Computational the ...
- Laplace(拉普拉斯)算子
[摘要] Laplace算子作为边缘检测之一,和Sobel算子一样也是工程数学中常用的一种积分变换,属于空间锐化滤波操作.拉普拉斯算子(Laplace Operator)是n维欧几里德空间中的一个二阶 ...
- opencv边缘检测-拉普拉斯算子
sobel算子一文说了,索贝尔算子是模拟一阶求导,导数越大的地方说明变换越剧烈,越有可能是边缘. 那如果继续对f'(t)求导呢? 可以发现"边缘处"的二阶导数=0. 我们可以利用这 ...
- OpenCV笔记(2)(高斯平滑、腐蚀和膨胀、开闭运算、礼帽和黑帽、Sobel及其他算子)
一.高斯平滑(模糊) def gaussian_blur(image): # 设置ksize来确定模糊效果 img = cv.GaussianBlur(image, (5, 5), 0) cv.ims ...
随机推荐
- webpack 使用 extract-text-webpack-plugin 报错 Tapable.plugin is deprecated. Use new API on .hooks instead
webpack 使用 extract-text-webpack-plugin 报错 Tapable.plugin is deprecated. Use new API on .hooks instea ...
- [Java.web][eclipse]经验集
自动提示部分内容来自:http://www.cnblogs.com/mashuangying2016/p/6549991.html 使用 Eclipse 调试 Tomcat 的设置: Window - ...
- 1095 Cars on Campus
题意:给出N量车的车牌号,进出的时间,进/出状态.然后给出若干个查询,要求计算在每一查询时刻校园内停着的汽车数量,最后输出这一天中停放时间最长的车辆(若车不止一辆,则按字典序输出)以及停放时间.注:查 ...
- 小程序scroll-view组件使用时,子元素虽设置样式display:inline-flex;whit-space:nowrap
小程序scroll-view组件使用时,子元素虽设置样式display:inline-flex;whit-space:nowrap
- linux编辑器使用记录
超强大vim配置文件: wget http://files.cnblogs.com/ma6174/vimrc.zip unzip -f vimrc.zip -d ~/ 一.vim编辑器 进入 ...
- OD 实验(三) - 破解程序的文件验证
需要破解的程序 双击程序,提示需要许可证文件 逆向程序 用 OD 打开 LoadIconA 为加载图标 LoadCursorA 为加载鼠标 F8 走一下程序 走到了这里,调用了 CreateFileA ...
- ubuntu 固定静态IP
http://jingyan.baidu.com/article/e5c39bf5bbe0e739d7603396.html 路由器每重启一次,IP都会改变,那么实验室的路由器一天要断电好几次,那么每 ...
- 浏览器及CURL代理设置
需要代理的请求 代理服务器及端口 120.197.233.205 80 firefox为例浏览器代理设置:(浏览器端也可以通过foxyproxy插件方便设置) 选项->高级->网络-> ...
- Tkinter grid() 方法
Tkinter grid() 方法:这个的几何管理器组织在父部件的表状结构中的部件. 这的几何管理器组织表状结构中的小部件的父部件. 语法: widget.grid( grid_optio ...
- 「小程序JAVA实战」小程序的flex布局(22)
转自:https://idig8.com/2018/08/09/xiaochengxu-chuji-22/ 之前已经把小程序的框架说完了,接下来说说小程序的组件,在说组件之前,先说说布局吧.源码:ht ...