Python+OpenCV图像处理(十)—— 图像二值化
简介:图像二值化就是将图像上的像素点的灰度值设置为0或255,也就是将整个图像呈现出明显的黑白效果的过程。
一、普通图像二值化
代码如下:
import cv2 as cv
import numpy as np #全局阈值
def threshold_demo(image):
gray = cv.cvtColor(image, cv.COLOR_RGB2GRAY) #把输入图像灰度化
#直接阈值化是对输入的单通道矩阵逐像素进行阈值分割。
ret, binary = cv.threshold(gray, 0, 255, cv.THRESH_BINARY | cv.THRESH_TRIANGLE)
print("threshold value %s"%ret)
cv.namedWindow("binary0", cv.WINDOW_NORMAL)
cv.imshow("binary0", binary) #局部阈值
def local_threshold(image):
gray = cv.cvtColor(image, cv.COLOR_RGB2GRAY) #把输入图像灰度化
#自适应阈值化能够根据图像不同区域亮度分布,改变阈值
binary = cv.adaptiveThreshold(gray, 255, cv.ADAPTIVE_THRESH_GAUSSIAN_C,cv.THRESH_BINARY, 25, 10)
cv.namedWindow("binary1", cv.WINDOW_NORMAL)
cv.imshow("binary1", binary) #用户自己计算阈值
def custom_threshold(image):
gray = cv.cvtColor(image, cv.COLOR_RGB2GRAY) #把输入图像灰度化
h, w =gray.shape[:2]
m = np.reshape(gray, [1,w*h])
mean = m.sum()/(w*h)
print("mean:",mean)
ret, binary = cv.threshold(gray, mean, 255, cv.THRESH_BINARY)
cv.namedWindow("binary2", cv.WINDOW_NORMAL)
cv.imshow("binary2", binary) src = cv.imread('E:/imageload/kobe.jpg')
cv.namedWindow('input_image', cv.WINDOW_NORMAL) #设置为WINDOW_NORMAL可以任意缩放
cv.imshow('input_image', src)
threshold_demo(src)
local_threshold(src)
custom_threshold(src)
cv.waitKey(0)
cv.destroyAllWindows()
运行结果:
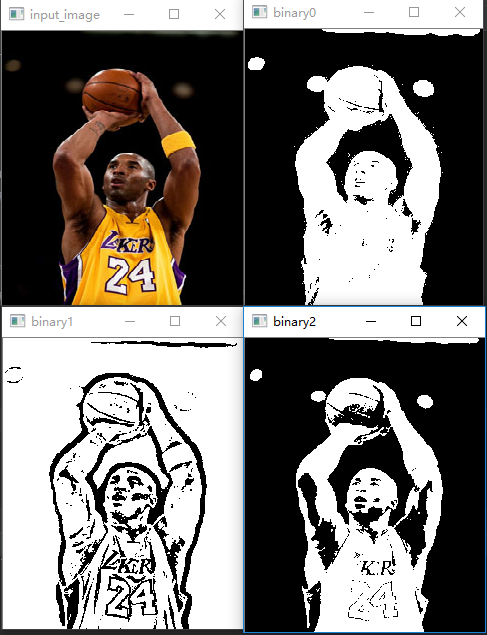
注意:
1.全局阈值
①OpenC的threshold函数进行全局阈值。其函数原型为:threshold(src, thresh, maxval, type[, dst]) -> retval, dst
src参数表示输入图像(多通道,8位或32位浮点)。
thresh参数表示阈值。
maxval参数表示与THRESH_BINARY和THRESH_BINARY_INV阈值类型一起使用设置的最大值。
type参数表示阈值类型。
retval参数表示返回的阈值。若是全局固定阈值算法,则返回thresh参数值。若是全局自适应阈值算法,则返回自适应计算得出的合适阈值。
dst参数表示输出与src相同大小和类型以及相同通道数的图像。
②type参数阈值类型这部分参考博客:https://blog.csdn.net/iracer/article/details/49232703 ,写的很不错。
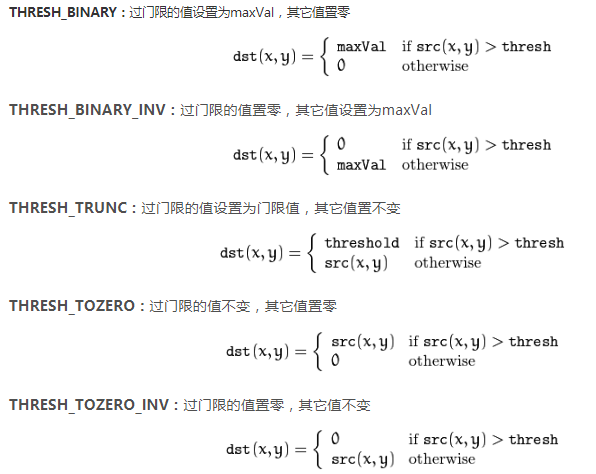
阈值类型:
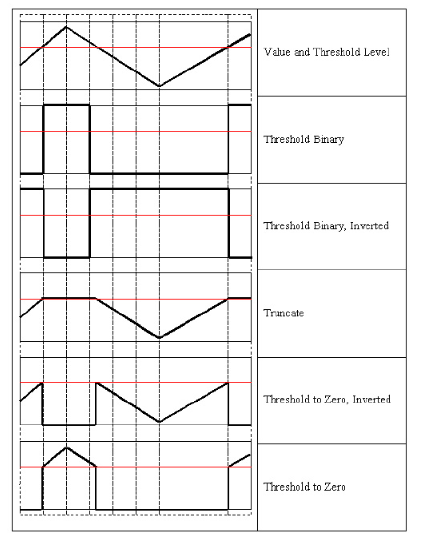
阈值类型图示:
③type参数单独选择上述五种阈值类型时,是固定阈值算法,效果比较差。
此外还有自适应阈值算法:(自适应计算合适的阈值,而不是固定阈值)
比如结合cv.THRESH_OTSU,写成cv.THRESH_BINARY | cv.THRESH_OTSU。例子:ret, binary = cv.threshold(gray, 0, 255, cv.THRESH_BINARY | cv.THRESH_OTSU) #大律法,全局自适应阈值,第二个参数值0可改为任意数字但不起作用。
比如结合cv.THRESH_TRIANGLE,写成cv.THRESH_BINARY | cv.THRESH_TRIANGLE。例子:ret, binary = cv.threshold(gray, 0, 255, cv.THRESH_BINARY | cv.THRESH_TRIANGLE) #TRIANGLE法,全局自适应阈值,第二个参数值0可改为任意数字但不起作用,适用于单个波峰。
补:
cv.THRESH_OTSU和cv.THRESH_TRIANGLE也可单独使用,不一定要写成和固定阈值算法结合的形式。单独写和结合起来写,都是自适应阈值算法优先。
例子:ret, binary = cv.threshold(gray, 0, 255, cv.THRESH_OTSU) #大律法 ret, binary = cv.threshold(gray, 0, 255, cv.THRESH_TRIANGLE) #TRIANGLE法
2.局部阈值
OpenCV的adaptiveThreshold函数进行局部阈值。函数原型为:adaptiveThreshold(src, maxValue, adaptiveMethod, thresholdType, blockSize, C[, dst]) -> dst
src参数表示输入图像(8位单通道图像)。
maxValue参数表示使用 THRESH_BINARY 和 THRESH_BINARY_INV 的最大值.
adaptiveMethod参数表示自适应阈值算法,平均 (ADAPTIVE_THRESH_MEAN_C)或高斯(ADAPTIVE_THRESH_GAUSSIAN_C)。
thresholdType参数表示阈值类型,必须为THRESH_BINARY或THRESH_BINARY_INV的阈值类型。
blockSize参数表示块大小(奇数且大于1,比如3,5,7........ )。
C参数是常数,表示从平均值或加权平均值中减去的数。 通常情况下,这是正值,但也可能为零或负值。
补:在使用平均和高斯两种算法情况下,通过计算每个像素周围blockSize x blockSize大小像素块的加权均值并减去常量C即可得到自适应阈值。如果使用平均的方法,则所有像素周围的权值相同;如果使用高斯的方法,则每个像素周围像素的权值则根据其到中心点的距离通过高斯方程得到。
参考:https://blog.csdn.net/guduruyu/article/details/68059450
3.numpy的reshape函数是给数组一个新的形状而不改变其数据,函数原型:reshape(a, newshape, order='C')
a参数表示需要重新形成的原始数组。
newshape参数表示int或int类型元组(tuple),若为(1, 3),表示生成的新数组是1行3列。
order参数表表示使用此索引顺序读取a的元素,并使用此索引顺序将元素放置到重新形成的数组中。
函数返回值:如果可能的话,这将是一个新的视图对象; 否则,它会成为副本。
Python+OpenCV图像处理(十)—— 图像二值化的更多相关文章
- Win8 Metro(C#)数字图像处理--2.59 P分位法图像二值化
原文:Win8 Metro(C#)数字图像处理--2.59 P分位法图像二值化 [函数名称] P分位法图像二值化 [算法说明] 所谓P分位法图像分割,就是在知道图像中目标所占的比率Rat ...
- Win8 Metro(C#)数字图像处理--2.55OSTU法图像二值化
原文:Win8 Metro(C#)数字图像处理--2.55OSTU法图像二值化 [函数名称] Ostu法图像二值化 WriteableBitmap OstuThSegment(Writ ...
- Win8 Metro(C#)数字图像处理--2.56简单统计法图像二值化
原文:Win8 Metro(C#)数字图像处理--2.56简单统计法图像二值化 [函数名称] 简单统计法图像二值化 WriteableBitmap StatisticalThSegment(Wr ...
- Win8 Metro(C#)数字图像处理--2.57一维最大熵法图像二值化
原文:Win8 Metro(C#)数字图像处理--2.57一维最大熵法图像二值化 [函数名称] 一维最大熵法图像二值化WriteableBitmap EntropymaxThSegment(Wr ...
- Win8 Metro(C#)数字图像处理--2.58双峰法图像二值化
原文:Win8 Metro(C#)数字图像处理--2.58双峰法图像二值化 [函数名称] 双峰法图像二值化 WriteableBitmap PeakshistogramThSegment( ...
- Win8 Metro(C#)数字图像处理--2.54迭代法图像二值化
原文:Win8 Metro(C#)数字图像处理--2.54迭代法图像二值化 [函数名称] 迭代法图像二值化 int IterativeThSegment(WriteableBitm ...
- Win8MetroC#数字图像处理--2.2图像二值化函数
原文:Win8MetroC#数字图像处理--2.2图像二值化函数 [函数代码] /// <summary> /// Binary process. /// </summary> ...
- python实现图像二值化
1.什么是图像二值化 彩色图像: 有blue,green,red三个通道,取值范围均为0-255 灰度图:只有一个通道0-255,所以一共有256种颜色 二值图像:只有两种颜色,黑色和白色,二值化就是 ...
- [python-opencv]图像二值化【图像阈值】
图像二值化[图像阈值]简介: 如果灰度图像的像素值大于阈值,则为其分配一个值(可以是白色255),否则为其分配另一个值(可以是黑色0) 图像二值化就是将灰度图像上的像素值设置为0或255,也就是将整个 ...
随机推荐
- 并发编程---互斥锁---互斥锁与join的区别
互斥锁 互斥锁:就是把多个进程并发,修改成一块共享数据的操作变成串行,保证是一个一个来修改的. 缺点:效率低,加锁过程复杂 优点:增加了安全性 from multiprocessing import ...
- PHPstorm破解方法及xdebug的断点调试
原文地址:http://www.php.cn/php-weizijiaocheng-381903.html 相信用PHPstorm的程序员肯定很多,令人头疼的是下载的PHPstorm是有使用期限的,小 ...
- case关联表查询
select a.员工编号,b.`姓名`,b.`地址`,case when a.收入 is null then '没钱' when a.收入 < 2000 then '低收入'when a.收入 ...
- mapper映射文件不发布
mapper映射文件不发布的问题:在pom.xml中配置,指定加载哪些资源 <resources> <resource> <directory>src/main/j ...
- iText实现导出pdf文件java代码实现例子
///////////////////////////////////主类////////////////////////////////////////// package com.iText; i ...
- Element-ui的表单中怎么添加正则校验
1. 以中国大陆手机号验证为例 // 这是组价的代码 <el-form-item prop="mobile"> <el-input type="text ...
- AFNetworking 源码解析
3.0 之后,就取消了NSOperation的控制. 因为根据Apple Developer Document的文档 https://developer.apple.com/documentation ...
- js图的数据结构处理---迪杰斯特拉算法
/*//1.确定数据结构, mapf[i][j] 为点i到点j的距离 [ Infinity 2 5 Infinity Infinity Infinity Infinity 2 6 Infinity I ...
- 时间序列模式(ARIMA)---Python实现
时间序列分析的主要目的是根据已有的历史数据对未来进行预测.如餐饮销售预测可以看做是基于时间序列的短期数据预测, 预测的对象时具体菜品的销售量. 1.时间序列算法: 常见的时间序列模型; 2.时序模 ...
- ida pro 使用
交互式反汇编器专业版(Interactive Disassembler Professional),人们常称其为IDA Pro,或简称为IDA.是目前最棒的一个静态反编译软件,为众多0day世界的成员 ...