kitti 数据集解析
1、KITTI数据集采集平台:
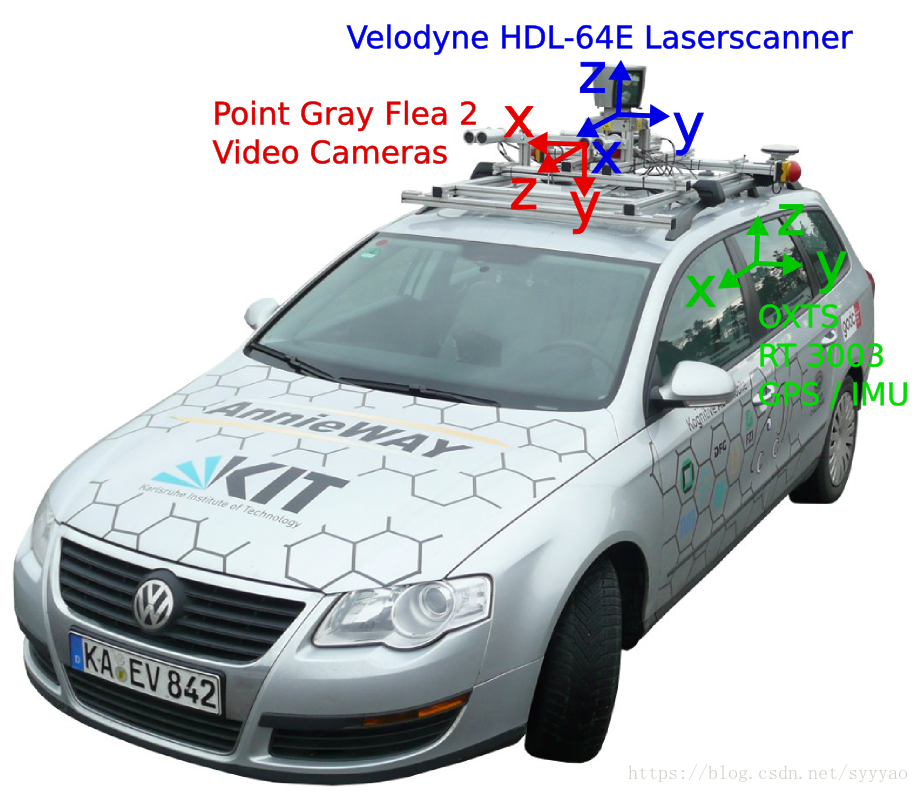
KITTI数据采集平台包括2个灰度摄像机,2个彩色摄像机,一个Velodyne 3D激光雷达,4个光学镜头,以及1个GPS导航系统。坐标系转换原理参见click。KITTI提供的数据中都包含三者的标定文件,不需人工转换。

2、KITTI数据集,label文件解析:
Car 0.00 0 -1.84 662.20 185.85 690.21 205.03 1.48 1.36 3.51 5.35 2.56 58.84 -1.75
第1个字符串:代表物体类别
'Car', 'Van', 'Truck','Pedestrian', 'Person_sitting', 'Cyclist','Tram', 'Misc' or 'DontCare'
注意:’DontCare’ 标签表示该区域没有被标注,比如由于目标物体距离激光雷达太远。为了防止在评估过程中(主要是计算precision),将本来是目标物体但是因为某些原因而没有标注的区域统计为假阳性(false positives),评估脚本会自动忽略’DontCare’ 区域的预测结果。
第2个数:代表物体是否被截断,从0(非截断)到1(截断)浮动,其中truncated指离开图像边界的对象
第3个数:代表物体是否被遮挡,整数0,1,2,3表示被遮挡的程度
0:完全可见 1:小部分遮挡 2:大部分遮挡 3:完全遮挡(unknown)
第4个数:alpha,物体的观察角度,范围:-pi~pi
第5~8这4个数:物体的2维边界框,左上角和右下角的像素坐标
第9~11这3个数:3维物体的尺寸,高、宽、长(单位:米)
第12~14这3个数:3维物体的位置 x,y,z(在照相机坐标系下,单位:米)
第15个数:3维物体的空间方向:rotation_y,在照相机坐标系下,相对于y轴的旋转角,范围:-pi~pi
有些有第16个数:检测的置信度 , 仅用于结果:浮点,p / r曲线所需,越高越好
3、KITTI数据集,calib解析

要将Velodyne坐标中的点x投影到左侧的彩色图像中y:
使用公式:y = P2 * R0_rect *Tr_velo_to_cam * x
将Velodyne坐标中的点投影到右侧的彩色图像中:
使用公式:y = P3 * R0_rect *Tr_velo_to_cam * x
Tr_velo_to_cam * x :是将Velodyne坐标中的点x投影到编号为0的相机(参考相机)坐标系中
R0_rect *Tr_velo_to_cam * x :是将Velodyne坐标中的点x投影到编号为0的相机(参考相机)坐标系中,再修正
P2 * R0_rect *Tr_velo_to_cam * x :是将Velodyne坐标中的点x投影到编号为0的相机(参考相机)坐标系中,再修正,然后投影到编号为2的相机(左彩色相机)
注意:所有矩阵都存储在主行中,即第一个值对应于第一行。 R0_rect包含一个3x3矩阵,需要将其扩展为4x4矩阵,方法是在右下角添加1,在其他位置添加0。 Tr_xxx是一个3x4矩阵(R | t),需要以相同的方式扩展到4x4矩阵!
通过使用校准文件夹中的3x4投影矩阵,可以将相机坐标系中的坐标投影到图像中,对于提供图像的左侧彩色相机,必须使用P2。rotation_y和alpha之间的区别在于rotation_y直接在相机坐标中给出,而alpha也会考虑从相机中心到物体中心的矢量,以计算物体相对于相机的相对方向。 例如,沿着摄像机坐标系的X轴面向的汽车,无论它位于X / Z平面(鸟瞰图)中的哪个位置,它的rotation_y都为 0,而只有当此车位于相机的Z轴上时α才为零,当此车从Z轴移开时,观察角度α将会改变。
3、KITTI数据集,velodyne解析
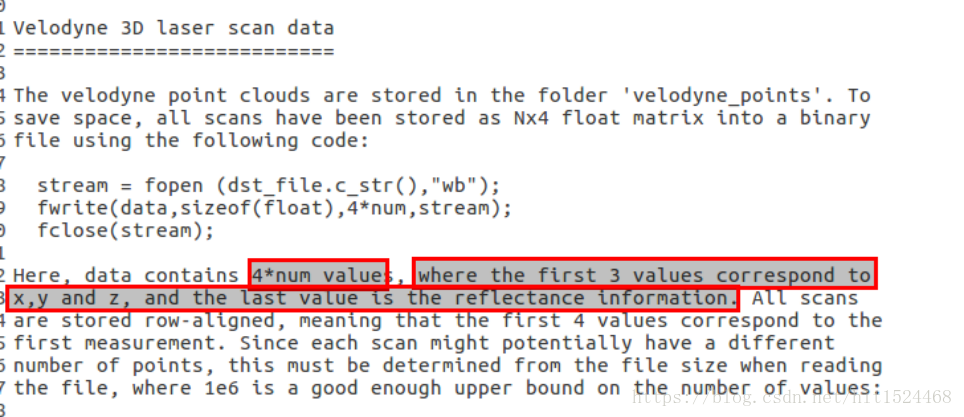
个坐标和反射率信息,即(x,y,z,r),并且数据类型为浮点数类型,如下图所示:
参考网址:
https://blog.csdn.net/cuichuanchen3307/article/details/80596689
https://blog.csdn.net/julialove102123/article/details/78432496
https://blog.csdn.net/hit1524468/article/details/79766805
kitti 数据集解析的更多相关文章
- kitti数据集标定文件解析
1.kitti数据采集平台 KITTI数据集的数据采集平台装配有2个灰度摄像机,2个彩色摄像机,一个Velodyne64线3D激光雷达,4个光学镜头,以及1个GPS导航系统.图示为传感器的配置平面图, ...
- KITTI数据集格式说明
由于上一篇博客所提到的论文中的训练数据是KITTI的数据集,因此如果我想要用自己的数据集进行训练的话,就需要先弄清楚KITTI数据集的格式,在以下的网址找到了说明: 首先,数据描述中是这样的: 在以下 ...
- 激光相机数据融合(3)--KITTI数据集
KITTI数据集提供了双目图像,激光数据,和imu/gps位置信息,其中还包括了大量的算法.下载地址为:http://www.cvlibs.net/datasets/kitti/raw_data.ph ...
- KITTI数据集的使用——雷达与相机的数据融合
目录 目的 如何实现 kitti数据集简介 kitti数据集的raw_data 利用kitti提供的devkit以及相应数据集的calib文件 解读calib文件夹 解读devkit 目的 使用雷达点 ...
- KITTI数据集
目的 使用雷达点云提供的深度信息 如何实现 将雷达的三维点云投影到相机的二维图像上 kitti数据集简介 kitti的数据采集平台,配置有四个摄像机和一个激光雷达,四个摄像机中有两个灰度摄像机,两个彩 ...
- KITTI数据集上MaskRCNN检测效果示例
KITTI数据集上MaskRCNN检测效果示例 在Semantic Instance Segmentation Evaluation中,MaskRCNN性能效果排名第一. Test Image 0 I ...
- stixel-world跑在kitti数据集
kitti数据集中每一帧的Calibration不同,每一帧都存储了4个相机的Calibration http://ww.cvlibs.net/publications/Geiger2013IJRR. ...
- 推荐系统:MovivLens20M数据集解析
MovieLens 是历史最悠久的推荐系统.它由美国 Minnesota 大学计算机科学与工程学院的 GroupLens 项目组创办,是一个非商业性质的.以研究为目的的实验性站点.MovieLens ...
- 下载Kitti 数据集(dataset) data_road.zip
官网下载http://www.cvlibs.net/download.php?file=data_road.zip,耗时近3小时,虽然只有几百兆. 但是,我坚持下来了. 保存到了百度网盘,以供国内用户 ...
随机推荐
- Java自定义注解和运行时靠反射获取注解
转载:http://blog.csdn.net/bao19901210/article/details/17201173/ java自定义注解 Java注解是附加在代码中的一些元信息,用于一些工具在编 ...
- js随机数 从头开始系列
js要常常写啊要不然就要从0开始 1 var num = Math.random(); //创建一个0-1随机数字 num*=10 //变为0-10随机数字 //有好几种取整方式 var i = Ma ...
- 【环境配置】Linux的经常使用命令
系统信息 arch 显示机器的处理器架构uname -m 显示机器的处理器架构uname -r 显示正在使用的内核版本号 dmidecode -q 显示硬件系统部件 - (SMBIOS / DMI) ...
- struts1.3中使用DispatchAction的一个问题
近期做项目发现我们公司的项目是用struts1写的,在多方百度下,总有理解了struts1.3的DispatchAction的使用方法 一:struts.xml文件的配置 <?xml versi ...
- inch mil mm换算
inch:英寸 mil:密耳 mm:毫米 1mil=0.0254mm=25.4um 1mm=39.37mil 1inch=1000mil=25.4mm
- 使用 Kingfisher 处理网络图片的读取与缓存
Kingfisher 是一个读取网络图片和处理本地缓存的开源库,由 onevcat 开发.提到图片缓存库,那么熟悉 Objective-C 开发的同学,可能会想起 SDWebImage. 没错,Kin ...
- AngularJs + html 5 实现 裁剪上传
直接上代码 directive.js app.directive('fileUploadersm', function () { return { restrict: 'E', transclude: ...
- Django-models-m2m
在Django的orm中,如果有多对多的字段,那么他的第三张表时自己生成的,参考官方文档发现第三张表可以自己写↓: 而且第三张表好像是可以自定制的 from django.db import mode ...
- python-tornado操作
Tornado 是 FriendFeed 使用的可扩展的非阻塞式 web 服务器及其相关工具的开源版本.这个 Web 框架看起来有些像web.py 或者 Google 的 webapp,不过为了能有效 ...
- AAC包增加ADTS头Without MediaCodec
AAC原始码流无法直接播放,一般需要封装为ADTS格式才能再次使用,本博主在android中用MediaCodec编码得到的AAC就是raw格式,为了保存为.aac格式,需要增加adts头,这样就可以 ...