基于Arduino的红外遥控
1、红外接收头介绍
一、什么是红外接收头?
红外遥控器发出的信号是一连串的二进制脉冲码。为了使其在无线传输过程中免受其他红外信号的干扰,通常都是先将其调制在特定的载波频率上,然后再经红外发射二极管发射出去,而红外线接收装置则要滤除其他杂波,叧接收该特定频率的信号并将其还原成二进制脉冲码,也就是解调.
二、工作原理
内置接收管将红外发射管发射出来癿光信号转换为微弱的电信号,此信号经由IC内部放大器进行放大,然后通过自动增益控制、带通滤波、解调变、波形整形后还原为遥控器发射出的原始编码,经由接收头的信号输出脚输入到电器上的编码识别电路。
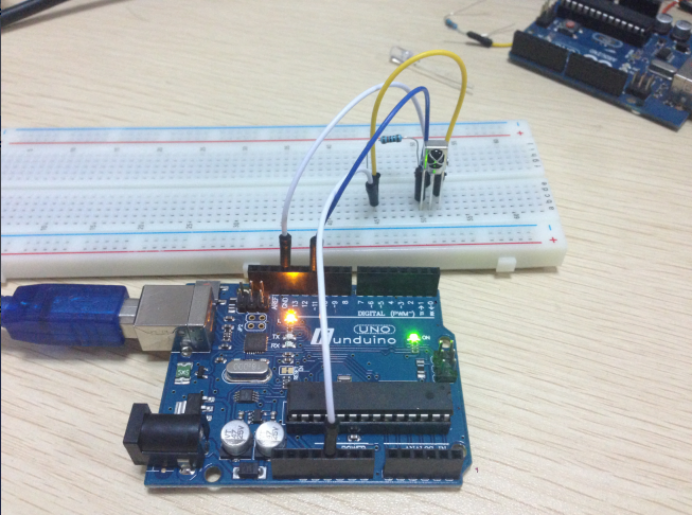
三、红外接收头的引脚与连线

红外接收头有三个引脚如下图:
用的时候将VOUT接到模拟口,GND接到实验板上的GND,VCC接到实验板上的+5v。
红外遥控实验
1、实验器件
红外遥控器:1个
红外接收头:1个
LED灯:6个
220Ω电阻:6个
多彩面包线:若干
2、实验连线
首先将板子连接好;接着将红外接收头按照上述方法接好,将VOUT接到数字11口引脚,将LED灯通过电阻接到数字引脚2,3,4,5,6,7。返样就完成了电路部分的连接。
3、实验原理
要想对某一遥控器进行解码必须要了解该遥控器的编码方式。本产品使用的控器的码方式为:NEC协议。下面就介绍一下NEC协议:
·NEC协议介绍:特点:(1)8位地址位,8位命令位
(2)为了可靠性地址位和命令位被传输两次
(3)脉冲位置调制
(4)载波频率38khz
(5)每一位癿时间为1.125ms戒2.25ms
·逻辑 0和1的定义如下图
协议如下: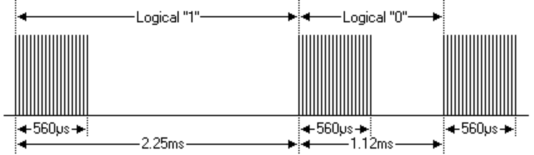
·按键按下立刻松开的发射脉冲:

上面图片显示了NEC的协议典型的脉冲序列。注意:这首先发送LSB(最低位)的协议。在上面癿脉冲传输的地址为0x59命令为0x16。一个消息是由一个9ms的高电平开始,随后有一个4.5ms的低电平,(返两段电平组成引寻码)然后由地址码和命令码。地址和命令传输两次。第二次所有位都取反,可用于对所收到的消息中的确认使用。总传输时间是恒定的,因为每一点与它取反长度重复。如果你不感兴趣,你可以忽略这个可靠性取反,也可以扩大地址和命令,以每16位!
按键按下一段时间才松开的发射脉冲:
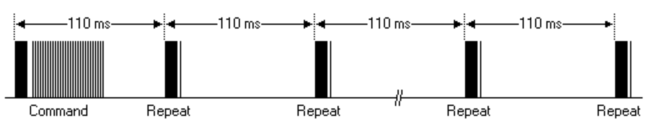
一个命令发送一次,即使在遥控器上的按键仍然按下。当按键一直按下时,第一个110ms癿脉冲与上图一样,之后每110ms重复代码传输一次。返个重复代码是由一个9ms的高电平脉冲和一个2.25ms低电平和560μs癿高电平组成。
·重复脉冲

注意:脉冲波形进入一体化接收头以后,因为一体化接收头里要迕解码、信号放大和整形,故要注意:在没有红外信号时,其输出端为高电平,有信号时为低电平,故其输出信号电平正好和发射端相反。接收端脉冲大家可以通过示波器看到,结合看到的波形理解程序。
线路连接图:
#include <IRremote.h>
int RECV_PIN = ;
int LED1 = ;
int LED2 = ;
int LED3 = ;
int LED4 = ;
int LED5 = ;
int LED6 = ;
long on1 = 0x00FFA25D;
long off1 = 0x00FFE01F;
long on2 = 0x00FF629D;
long off2 = 0x00FFA857;
long on3 = 0x00FFE21D;
long off3 = 0x00FF906F;
long on4 = 0x00FF22DD;
long off4 = 0x00FF6897;
long on5 = 0x00FF02FD;
long off5 = 0x00FF9867;
long on6 = 0x00FFC23D;
long off6 = 0x00FFB047;
IRrecv irrecv(RECV_PIN);
decode_results results;
// Dumps out the decode_results structure.
// Call this after IRrecv::decode()
// void * to work around compiler issue
//void dump(void *v) {
// decode_results *results = (decode_results *)v
void dump(decode_results *results) {
int count = results->rawlen;
if (results->decode_type == UNKNOWN)
{
Serial.println("Could not decode message");
}
else
{
if (results->decode_type == NEC)
{
Serial.print("Decoded NEC: ");
}
else if (results->decode_type == SONY)
{
Serial.print("Decoded SONY: ");
}
else if (results->decode_type == RC5)
{
Serial.print("Decoded RC5: ");
}
else if (results->decode_type == RC6)
{
Serial.print("Decoded RC6: ");
}
Serial.print(results->value, HEX);
Serial.print(" (");
Serial.print(results->bits, DEC);
Serial.println(" bits)");
}
Serial.print("Raw (");
Serial.print(count, DEC);
Serial.print("): "); for (int i = ; i < count; i++)
{
if ((i % ) == ) {
Serial.print(results->rawbuf[i]*USECPERTICK, DEC);
}
else
{
Serial.print(-(int)results->rawbuf[i]*USECPERTICK, DEC);
}
Serial.print(" ");
}
Serial.println("");
} void setup()
{
pinMode(RECV_PIN, INPUT);
pinMode(LED1, OUTPUT);
pinMode(LED2, OUTPUT);
pinMode(LED3, OUTPUT);
pinMode(LED4, OUTPUT);
pinMode(LED5, OUTPUT);
pinMode(LED6, OUTPUT);
pinMode(, OUTPUT);
Serial.begin(); irrecv.enableIRIn(); // Start the receiver
} int on = ;
unsigned long last = millis(); void loop()
{
if (irrecv.decode(&results))
{
// If it's been at least 1/4 second since the last
// IR received, toggle the relay
if (millis() - last > )
{
on = !on;
// digitalWrite(8, on ? HIGH : LOW);
digitalWrite(, on ? HIGH : LOW);
dump(&results);
}
if (results.value == on1 )
digitalWrite(LED1, HIGH);
if (results.value == off1 )
digitalWrite(LED1, LOW);
if (results.value == on2 )
digitalWrite(LED2, HIGH);
if (results.value == off2 )
digitalWrite(LED2, LOW);
if (results.value == on3 )
digitalWrite(LED3, HIGH);
if (results.value == off3 )
digitalWrite(LED3, LOW);
if (results.value == on4 )
digitalWrite(LED4, HIGH);
if (results.value == off4 )
digitalWrite(LED4, LOW);
if (results.value == on5 )
digitalWrite(LED5, HIGH);
if (results.value == off5 )
digitalWrite(LED5, LOW);
if (results.value == on6 )
digitalWrite(LED6, HIGH);
if (results.value == off6 )
digitalWrite(LED6, LOW);
last = millis();
irrecv.resume(); // Receive the next value
}
}
五、程序功能
对遥控器发射出来的编码脉冲进行解码,根据解码结果执行相应的动作。返样大家就可以用遥控器遥控你的器件了,让它听你的指挥。
实验截图:

基于Arduino的红外遥控的更多相关文章
- 基于FPGA的红外遥控解码与PC串口通信
基于FPGA的红外遥控解码与PC串口通信 zouxy09@qq.com http://blog.csdn.net/zouxy09 这是我的<电子设计EDA>的课程设计作业(呵呵,这个月都拿 ...
- 基于arduino的红外传感系统
一.作品背景 在这个科技飞速发展的时代,物联网已经成为了我们身边必不可少的技术模块,我这次课程设计做的是一个基于arduino+树莓派+OneNet的红外报警系统,它主要通过识别人或者动物的运动来判断 ...
- 基于STM32的红外遥控重点解析
本文有两个内容:一.红外遥控协议的的讲解:二.解码程序解析(参考正点原子的代码) 红外的介绍.优点.缺点就不给大家说了,进入正题 一.红外遥控协议的的讲解 红外遥控的编码目前广泛使用的是:NEC Pr ...
- 基于Arduino、STM32进行红外遥控信号接收
catalogue . 遥控器原理简介 . 红外遥控原理 . 常见红外遥控器红外线信号传输协议 . 遙控器的发展 . 实验过程 . 攻击面 . 基于STM32实现红外信号解码 1. 遥控器原理简介 0 ...
- Arduino红外遥控系列教程2013——红外转码
教程三:红外转码教程——用电视遥控器取代机顶盒遥控器 前言前段时间看到了使用红外遥控的X-Bot机器人[链接],感觉很有意思.最近开始玩Arduino与红外,一方面打算将来用于BOXZ的之间的通讯控制 ...
- arduino红外遥控库IRremote的IRsend类sendRaw函数溢出问题及其解决方法
最近在调试红外遥控格力空调,在论坛中学到了不少东西.参考: (1)<解决问题系列(4)——红外编码分析利器使用> (2)<315Mhz模块传输替代315Mhz遥控器> 调试环境 ...
- 基于STC89C52的oled红外遥控闹钟
这个红外遥控主要是程序通过对按下的键的键码进行解析,并运行相应的功能代码 一次按键动作的遥控编码信息为 32 位串行二进制码.对于二进制信号“0”,一个脉冲占 1.2ms:对于二进制信号“1”,一个脉 ...
- 红外遥控NEC协议使用总结
最近做了一个调试红外遥控三色灯的实习,花了一个多月的时间研究基于NEC协议的红外遥控,下面是这次实习技术方面的总结. 一.NEC协议特征: 8位地址和8位命令长度 每次传输两遍地址(用户码)和命令(按 ...
- STM32之红外遥控信号自学习实现
一.序言 很早前就想实现这个红外遥控自学习的这个实验,用于来自己控制房子里如空调等红外遥控设备的自动化,NEC的标准到具体的产品上可能就被厂家定义为不一样了,所以自学习就应该是接收到什么就发送什么,不 ...
随机推荐
- HDU2087 剪花布条 题解 KMP算法
题目链接:http://acm.hdu.edu.cn/showproblem.php?pid=2087 题目大意:给定字符串 \(s\) 和 \(t\) ,找出 \(s\) 中出现不重叠的 \(t\) ...
- setTimeout与setInterval有何区别?
①setTimeout和setInterval的语法相同.它们都有两个参数,一个是将要执行的代码字符串,还有一个是以毫秒为单位的时间间隔,当过了那个时间段之后就将执行那段代码. ②不过这两个函数还是有 ...
- Python--day19--random模块
random模块 >>> import random #随机小数 >>> random.random() # 大于0且小于1之间的小数 0.766433866365 ...
- HDU 1051
题意:给你n个木块的长和宽,现在要把它送去加工,这里怎么说呢,就是放一个木块花费一分钟,如果后面木块的长和宽大于等于前面木块的长和宽就不需要花费时间,否则时间+1,问把这个木块送去加工的最短时间. 思 ...
- IP地址和物理地址有什么区别
所谓IP地址就是给每个连接在Internet上的主机分配的一个32bit地址.简单地说就是你在整个互联网上的ID. MAC(Media Access Control,介质访问控制)地址 (物理地址)是 ...
- 在CentOS7上安装ftp服务器用于保存服务端上传的图片。
1.CentOS卸载vsftpd的方法 如果服务器上已经安装了vsftpd服务,配置出错需要卸载vsftpd服务. 1.1 查找vsftpd服务 [root@localhost /]# rpm -aq ...
- Cookie内不能直接存入中文,cookie转码以及解码
如果在cookie中存入中文,极易出现问题. js在存入cookie时,利用escape() 函数可对字符串进行编码, 用unescape()进行解码 顺序是先把cookie用escape()函数编码 ...
- P1064 连续自然数和
题目描述 对一个给定的自然数 M ,求出所有的连续的自然数段,这些连续的自然数段中的全部数之和为 M . 例子:1998+1999+2000+2001+2002=10000 ,所以从 1998 到 2 ...
- H3C 三种生成树协议的端口状态对比
- Java中try catch finally执行
直接上代码实例: public static void main(String[] args) { System.out.println(test1()); } static int test1 ...