opencv——均值/中值滤波器去噪
实验内容及实验原理:
1.用均值滤波器(即邻域平均法)去除图像中的噪声;
2.用中值滤波器去除图像中的噪声
3.比较两种方法的处理结果
实验步骤:
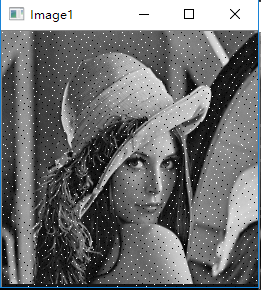
用原始图像lena.bmp或cameraman.bmp加产生的3%椒盐噪声图像合成一幅有噪声的图像并显示;
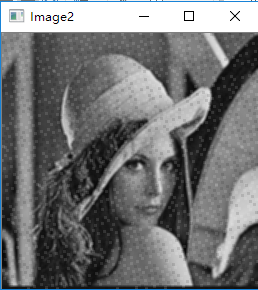
1.用均值滤波器去除图像中的噪声(选3x3窗口):以当前像素点为中心,求窗口内所有灰度值的和,以其平均值作为中心像素新的灰度值
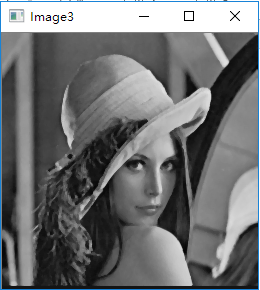
2. 用中值滤波器去除图像中的噪声(选3x3窗口做中值滤波);以当前像素点为中心,求窗口中所有像素点的灰度值的中值,以中值作为中心像素点的值
3.将两种处理方法的结果与原图比较,注意两种处理方法对边缘的影响。
添加椒盐噪声
以3%的几率产生随机为0/255的灰度值覆盖原来的灰度值
for (int i = 0; i <src->height; i++){
for (int j = 0; j <src->width; j++){
CvScalar s = cvGet2D(src, i,j);
srand(seed++);
if (rand() % 100 <3){//3%的几率覆盖
srand(seed++);
s.val[0]= rand() % 2 * 255;//随机是0还是255
}
cvSet2D(dst,i, j, s);
}
}添加后:
均值滤波
计算当前像素周围的九个像素点的灰度值和,以其平均值作为当前像素的灰度值。如果是边缘的像素点就求有限的几个像素灰度值的平均值
for (int i = 0;i < dst->height; i++){
for (int j = 0; j < dst->width; j++){
CvScalar s =cvGet2D(dst, i, j);
double sum =0;//存放窗口中所有像素点灰度值的和
int num =0;//记录窗口中像素的个数,因为边界上可能不是9个像素
//求3x3的和
for (int k = -1; k <= 1; k++)
for (int m = -1; m <= 1; m++)
if (i + k>= 0 && i + k <= 255 && j + m >= 0 && j + m<= 255){
CvScalar temp =cvGet2D(dst, i+k, j+m);
sum += temp.val[0];
num++;
}
s.val[0] = sum/num;
cvSet2D(dst_sp, i, j, s);
}
}
中值滤波
获取当前像素位置周围的九个像素灰度值,排序选择中间值作为新的灰度值。如果是边界的像素点就只选择有限的几个灰度值的中值
for (int i = 0;i < dst->height; i++){
for (int j = 0; j < dst->width; j++){
CvScalar s =cvGet2D(dst, i, j);
double val[9]= {0},mid=0;//分别为存放窗口中所有灰度值的数组和中值
int num =0;//记录实际窗口中有几个像素点
//遍历当前像素点为中心的3X3窗口
for (int k = -1; k <= 1; k++)
for (int m = -1; m <= 1; m++)
if (i + k>= 0 && i + k <= 255 && j + m >= 0 && j + m<= 255){//在图像上,没有超出边界
CvScalar temp =cvGet2D(dst, i + k, j + m);
val[num++]= temp.val[0];
}
//冒泡排序,从大到小
for (int k = 0; k < 9; k++){
for (int m = 0; m < 8-k; m++){
if (val[m]< val[m + 1]){
double temp =val[m];
val[m] = val[m + 1];
val[m + 1] = temp;
}
}
}
s.val[0] = val[num/2];//求中值
cvSet2D(dst_sp2, i, j, s);
}
}
源码:
// opencv1.cpp: 定义控制台应用程序的入口点。
//
#include "stdafx.h"
#include<iostream>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <cv.h>
#include <cxcore.h>
#include <cvaux.h>
#include <stdlib.h>
#include <imgproc.hpp>
#include <time.h>
using namespace cv;
int main()
{
IplImage *src;
src = cvLoadImage("lena.bmp", 1);//原图
IplImage *dst = cvCreateImage(cvSize(src->width, src->height), IPL_DEPTH_8U, 1);
std::cout << "添加椒盐噪声" << std::endl;
int seed = 1;
for (int i = 0; i < src->height; i++)
{
for (int j = 0; j < src->width; j++)
{
CvScalar s = cvGet2D(src, i, j);
srand(seed++);
if (rand() % 100 < 3)
{
srand(seed++);
s.val[0] = rand() % 2 * 255;
}
cvSet2D(dst, i, j, s);
}
}
cvNamedWindow("Image1", 1);//创建窗口
cvShowImage("Image1", dst);//显示图像
IplImage *dst_sp = cvCreateImage(cvSize(dst->width, dst->height), IPL_DEPTH_8U, 1);
std::cout << "均值滤波" << std::endl;
for (int i = 0; i < dst->height; i++)
{
for (int j = 0; j < dst->width; j++)
{
CvScalar s = cvGet2D(dst, i, j);
double sum = 0;
int num = 0;
//求3x3的和
for (int k = -1; k <= 1; k++)
for (int m = -1; m <= 1; m++)
if (i + k >= 0 && i + k <= 255 && j + m >= 0 && j + m <= 255)
{
CvScalar temp = cvGet2D(dst, i+k, j+m);
sum += temp.val[0];
num++;
}
s.val[0] = sum/num;
cvSet2D(dst_sp, i, j, s);
}
}
cvNamedWindow("Image2", 1);//创建窗口
cvShowImage("Image2", dst_sp);//显示图像
IplImage *dst_sp2 = cvCreateImage(cvSize(dst->width, dst->height), IPL_DEPTH_8U, 1);
std::cout << "中值滤波" << std::endl;
for (int i = 0; i < dst->height; i++)
{
for (int j = 0; j < dst->width; j++)
{
CvScalar s = cvGet2D(dst, i, j);
double val[9] = {0},mid=0;
int num = 0;
for (int k = -1; k <= 1; k++)
for (int m = -1; m <= 1; m++)
if (i + k >= 0 && i + k <= 255 && j + m >= 0 && j + m <= 255)
{
CvScalar temp = cvGet2D(dst, i + k, j + m);
val[num++]= temp.val[0];
}
//排序,从大到小
for (int k = 0; k < 9; k++)
{
for (int m = 0; m < 8-k; m++)
{
if (val[m] < val[m + 1])
{
double temp = val[m];
val[m] = val[m + 1];
val[m + 1] = temp;
}
}
}
s.val[0] = val[num/2];
cvSet2D(dst_sp2, i, j, s);
}
}
cvNamedWindow("Image3", 1);//创建窗口
cvShowImage("Image3", dst_sp2);//显示图像
cvWaitKey(0); //等待按键
cvReleaseImage(&dst_sp2); //释放图像
cvReleaseImage(&dst_sp); //释放图像
cvReleaseImage(&dst); //释放图像
}原图:(原来是bmp格式的,但是不能上传,改成png格式了,分辨率都是256X256的)

opencv——均值/中值滤波器去噪的更多相关文章
- Opencv均值漂移pyrMeanShiftFiltering彩色图像分割流程剖析
meanShfit均值漂移算法是一种通用的聚类算法,它的基本原理是:对于给定的一定数量样本,任选其中一个样本,以该样本为中心点划定一个圆形区域,求取该圆形区域内样本的质心,即密度最大处的点,再以该点为 ...
- Java Opencv 实现 中值滤波器
原理 Note 以下原理来源于Richard Szeliski 的著作 Computer Vision: Algorithms and Applications 以及 Learning OpenCV ...
- CV_图像滤波[转]---python+opencv均值滤波,高斯滤波,中值滤波,双边滤波
1.图像滤波算法(cv2) https://blog.csdn.net/qq_27261889/article/details/80822270 2.
- Python+OpenCV图像处理(七)—— 滤波与模糊操作
过滤是信号和图像处理中基本的任务.其目的是根据应用环境的不同,选择性的提取图像中某些认为是重要的信息.过滤可以移除图像中的噪音.提取感兴趣的可视特征.允许图像重采样等等.频域分析将图像分成从低频到高频 ...
- opencv知识积累
1.OpenCV 3计算机视觉:Python语言实现 https://github.com/techfort/pycv 2.OpenCV3编程入门 opencv 均值模糊:一般用来处理图像的随机噪声 ...
- Photoshop中磁力套索的一种简陋实现(基于Python)
经常用Photoshop的人应该熟悉磁力套索(Magnetic Lasso)这个功能,就是人为引导下的抠图辅助工具.在研发领域一般不这么叫,通常管这种边缘提取的办法叫Intelligent Sciss ...
- 数字图像去噪典型算法及matlab实现
原文地址http://jncumter.blog.51cto.com/812546/243961 图像去噪是数字图像处理中的重要环节和步骤.去噪效果的好坏直接影响到后续的图像处理工作如图像分割.边 ...
- [Object Tracking] MeanShift
使用Opencv中均值漂移meanShift跟踪移动目标 Opencv均值漂移pyrMeanShiftFiltering彩色图像分割流程剖析 Opencv目标跟踪—CamShift算法 MeanShi ...
- OpenCV---边缘保留滤波EPF
OpenCV经典的两种实现EPF方法:高斯双边和均值迁移 一:双边模糊 差异越大,越会完整保留 def bi_demo(image): dst = cv.bilateralFilter(image,0 ...
随机推荐
- webpack的像素转vw loader插件
这是一款针对webpack的像素转vw单位的loader插件. 笔者公司中,h5 rem的开发方案目前已经渐渐开始转向vw方案,因此本工具应运而生. 目前所制作的h5,大部分设计稿分辨率都是750的宽 ...
- C#调用webservice(二)
第二篇调用webservice,web服务是http://webservice.webxml.com.cn/webservices/DomesticAirline.asmx,航班查询服务 添加web服 ...
- 新疆大学(新大)OJ xju 1006: 比赛排名 第二类斯特林数+阶乘
题目链接:http://acm.xju.edu.cn/JudgeOnline/problem.php?id=1006 第二类斯特林数: 第二类Stirling数实际上是集合的一个拆分,表示将n个不同的 ...
- Glide中的回调:targets
Glide隐藏了一大推复杂的在后台的场景,Glide做了所有的网络请求和处理在后台线程中,准备好了切回到ui线程后更新ImageView. 假设ImageView不再是图像的最后一步.我们只要Bitm ...
- kinEditor动态渲染的问题
摘自:jingyan.baidu.com/article/a65957f4a4c89a24e67f9b3d.html 在使用kindEditor时,因为textarea是动态加载的,因而对textar ...
- Concurrency pattern
In software engineering, concurrency patterns are those types of design patterns that deal with the ...
- Git常见问题 资料汇总
来源https://blog.csdn.net/albb_/article/details/80420468
- PHP SOAP模块的使用方法:NON-WSDL模式
PHP SOAP扩展可以帮助我们很轻松的实现web service服务,在PHP的SOAP扩展中主要有两种操作模式:WSDL模式和NON-WSDL模式,前者通过使用WSDL文件名作为参数,并从 WSD ...
- 入门python:《Python编程快速上手让繁琐工作自动化》中英文PDF+代码
入门推荐学习<python编程快速上手>前6章是python的基础知识,通俗易懂地讲解基础,初学者容易犯错的地方,都会指出来.从第三章开始,每章都有一个实践项目,用来巩固前面所学的知识. ...
- 紫书 习题11-11 UVa 1644 (并查集)
这道题感觉思路非常巧妙, 我是看了别人的博客才想明白的. 这里用到了并查集, 以根节点为中心城市, 然后把边从大到小排序, 每次的当前的边即为容量, 因为是目前的最小值, 然后去算总的容量, 每次选容 ...