TurtleBot3使用课程-第二节b(北京智能佳)
目录
1.1.2 [turtlebot3 SBC]运行提出turtlebot3 3
1.1.3[远程PC]运行导航文件 4
1.2设置机器人的初始姿势 5
1.3导航目标设置 6
1.4导航调优指南 6
1.4.3.1 acc_lim_x,acc_lim_y,acc_lim_th 8
1.4.3.2 max_trans_vel,min_trans_vel 8
1.4.3.3 max_vel_x,min_vel_x,max_vel_y,min_vel_y 8
1.4.3.4 max_rot_vel,min_rot_vel 8

![]()
1.导航
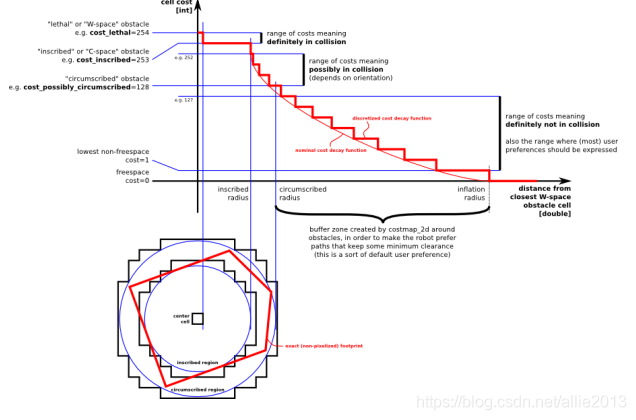
成本图计算对于成功导航至关重要。 基于描述机器人位置和方向、传感器值、障碍物信息和SLAM获得的地图的姿态信息计算Costmap。 计算结果表示为面积
机器人碰撞,潜在碰撞,并自由移动。 机器人可以根据计算结果创建安全路径。
有两种类型的costmap:全局costmap,它计划从机器人的开始位置到目的地的路径,以及本地costmap,它计算一条安全的路径来避免机器人周围的障碍。 在ROS中,costmap可以表示为数值。 0是机器人可以自由移动的区域,随着数值接近255,碰撞的概率增加。
0:无碰撞区
1~127:低碰撞概率区域128~252:高碰撞
概率区域253~254:碰撞区域
255:无障碍区域
![]()
http://wiki.ros.org/costmap_2d#Inflation
动态窗口方法(Dynamic Window Approach)是一种用于创建避免障碍的路径的方法。
DWA利用平移速度(v)和转速(ω)来预测和计算机器人可以移动的路径,并将机器人在硬件上所能达到的最大速度设置为限值。全球规划师创造了一条完整的路径,机器人可以跟随它到达目的地,dwa_local_planner创造了一条本地路径,避免了很好地跟随全球路径的障碍。 妇女事务部按以下顺序运作。
1.分别创建控制位置(DX、dy、dhteta。
2.模拟从其当前位置产生的每个样本,以预测机器人的位置,如果样本被应用在短时间内。
3.仿真结果转化为分数。 考虑了障碍物距离、目的地距离、到全局计划的距离和速度等因素,并将被物体击中的样本排除在结果计算之外。
4.得分最高的样本被选中并交付给机器人。
5.重复步骤1~4。
1.1 运行导航节点
1.1.1 [远程PC]运行roscore

![]()
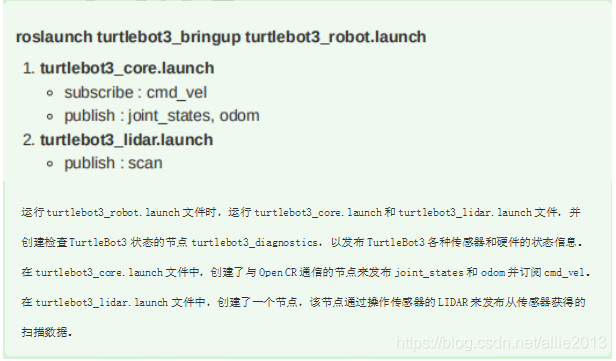
1.1.2 [turtlebot3 SBC]运行提出turtlebot3

![]()
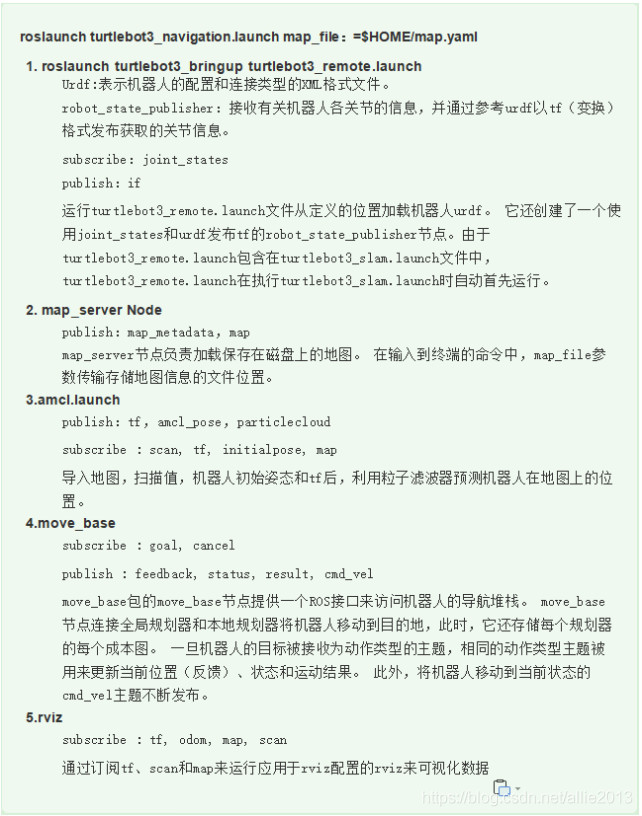
1.1.3 [远程PC]运行导航文件

![]()
![]()
运行上述命令将启动可视化工具Rviz。运行Rviz分别使用以下命令。
1.2设置机器人的初始姿势
导航时最重要的是在地图上显示机器人的确切电流位置。 利用基于概率的粒子滤波器应用自适应蒙特卡罗定位算法(AMCL)预测turtlebot3的位置
从机器人编码器、IMU和LDS等各种传感器获得的信息。 AMCL根据传感器信息预测机器人可能存在的位置。 它通过算法参数值中设置的运动量来更新机器人每次运动的预测位置值,以减少误差。
[远程PC]如果运行机器人运行导航的地图,并且机器人的LDS传感器正常运行,则必须根据机器人使用该地图的实际位置和方向来设置机器人在地图上的位置
![]()
![]()
1.点击
![]()
2.点击地图上机器人实际所在的点,按机器人所面对的方向拖动箭头。
3.重复上述过程,直到扫描值和地图在一定程度上重叠为止。
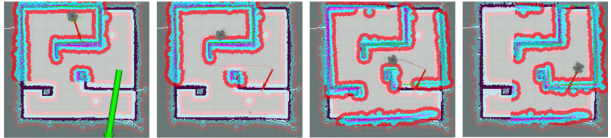
当初始姿态设置完成后,机器人使用绿色箭头指定的位置和方向作为Pose来估计实际机器人的位置和方向。 绿色箭头表示turtlebot3的概率位置。 LDS传感器在地图上显示障碍物。 初始波斯必须与 
![]()

![]()
在上图中,机器人周围广泛显示的一些绿色小箭头是AMCL通过机器人的传感器和指定机器人初始位置时的各种信息计算的机器人当前位置。 你看得出来
随着机器人的移动,分布电流位置估计接近机器人。
注意:如果turtlebot3_teleop_keyboard节点在运行导航之前运行,则必须关闭该节点。 从turtlebot3_teleop_keyboard节点发布的cmd_vel数据可能与导航的cmd_vel数据发生碰撞,导致机器人不能正常移动。
1.3 导航目标设置
[远程PC]如果地图显示在RViz中,并且机器人的初始位置设置正确,则可以指定机器人目的地的位置和方向。 点击 
![]()
1.点击
![]()
2.单击机器人将在地图上到达的目的地,并拖动机器人将面对的方向,以完成目标设置。当目标设置完成时,导航算法创建从机器人当前位置到目的地的路由,并给机器人一个跟随路线的命令。 如果机器人在移动时,障碍物出现在路径上,它会创建一条路径来避免障碍物并移动。
![]()
如果无法创建到目的地的路由,则导航目标设置可能失败。 如果你想在机器人走向目的地时停止它,你可以使用一种方法将机器人的当前位置重置到它的目的地。
1.4导航调优指南
1.4.1成本图参数
1.4.1.1 inflation_radius
用于当机器人通过设置与地图上障碍物的距离值来创建路径时保持最小安全距离。 通过设置此值大于机器人半径,可以避免与障碍物碰撞。

![]()
1.4.1.2 cost_scaling_factor
调整地图上标记为障碍物的区域的成本值的权重的常数。
cost_scaling_factor使用负指数值创建参数因子,如下所示。 cost_scaling_factor值越大,计算成本值越小。
Value of costmap_2d :: INSCRIBED_INFLATED_OBSTACLE is defined as 254.
exp{-1.0*cost_scaling_factor*(distance_from_obstacle-inscribed_radius)}*(costmap_2d:INSCRIBED_INFLATED_OBSTACLE-1)

![]()
1.4.2 AMCL参数
1.4.2.1 1min_particles,max_particles
控制AMCL节点中使用的粒子数。 增加粒子的数量增加了精度,但由于计算量的增加,它也减慢了计算速度。
1.4.2.2 initial_pose_x,initial_pose_y,initial_pose_a
设置机器人的初始位置和方位。也可以手动设置机器人的鼻子和 
![]()
1.4.2.3 update_min_d,update_min_a
设置更新粒子滤波器所需的最小平移距离(m)和旋转角(rad。 使用较小的值可以更频繁地进行更新,但计算量也会增加。
1.4.3 DWA参数
以下参数用于DWA的计算,保存在
![]()
文件和加载运行程序时,如果DWA参数没有设置机器人硬件的适当值,机器人可能无法正常工作。
1.4.3.1 acc_lim_x,acc_lim_y,acc_lim_th
设置机器人加速度的极限在x,y,θ方向在m/s2和rad/s2.1.4.3.2 max_trans_vel,min_trans_vel
以m/s的绝对值显示机器人的最大和最小平移速度。
1.4.3.3 max_vel_x,min_vel_x,max_vel_y,min_vel_y
设置最大值和最小值机器人可以在x,y方向以m/s移动。 由于turtlebot3不可能在y中平移,所以y的最大值和最小值设置为0。
1.4.3.4 max_rot_vel,min_rot_vel
设置机器人的最大转速和最小转速为rad/s
1.4.4 xy_goal_tolerance
设置机器人到达指定目的地时的x,y坐标中的距离误差。
1.4.5 yaw_goal_tolerance
设置机器人到达指定目的地时机器人所面对的角度的误差。
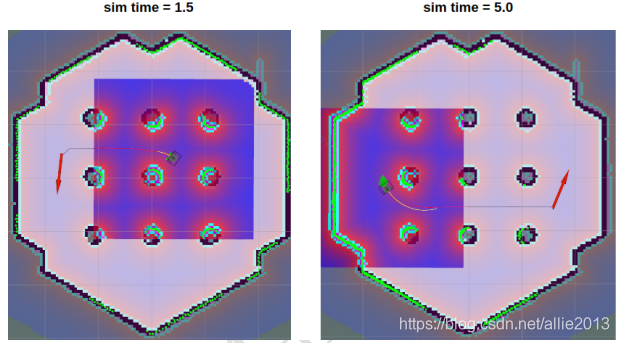
1.4.6 sim_time
设置机器人应该从机器人当前位置模拟预期路径的多少秒。
![]()
TurtleBot3使用课程-第二节b(北京智能佳)的更多相关文章
- TurtleBot3使用课程-第二节a(北京智能佳)
目录 1.[第3类]LRF(LDS)传感器 2 1.1 传感器包安装 2 1.1.1 传感器端口访问设置 2 1.1.2 运行hlds_laser_publisher节点 2 1.1.3 在RViz中 ...
- TurtleBot3使用课程-第一节b(北京智能佳)
目录 1.模拟运行TurtleBot 2 1.1 ROS安装和设置2 1.1.1 turtlebot3 在Gazebo中模拟 3 1.1.1.1用于Gazebo的ROS包装 3 1.1.1.2 tur ...
- TurtleBot3使用课程-第一节a(北京智能佳)
目录 1.ROS设置(远程PC) 2 1.1 ROS安装和设置 2 1.1.1 设置source.list 2 1.1.2 键设置 2 1.1.3 ROS安装 2 1.1.4安装包构建的依赖关系 2 ...
- android内部培训视频_第二节 布局基础
第二节:布局入门 一.线性布局 需要掌握的属性: 1.orientation:排列方式 vertical:垂直 Horizontal:水平 2.weight:水平布局的权重 3.gravity:子控件 ...
- python课程第二周重点记录
python课程第二周重点记录 1.元组的元素不可被修改,元组的元素的元素可以被修改(字典在元组中,字典的值可以被修改) 2.个人感觉方便做加密解密 3.一些方法的使用 sb = "name ...
- seajs第二节,seajs各模块依赖关系
index.html <!DOCTYPE html> <html> <head> <meta charset="utf-8"> &l ...
- 学习javascript基础知识系列第二节 - this用法
通过一段代码学习javascript基础知识系列 第二节 - this用法 this是面向对象语言中的一个重要概念,在JAVA,C#等大型语言中,this固定指向运行时的当前对象.但是在javascr ...
- VUE2.0实现购物车和地址选配功能学习第二节
第二节 创建VUE实例 购物车项目计划: 1.创建一个vue实例 2.通过v-for指令渲染产品数据 3.使用filter对金额和图片进行格式化 4.使用v-on实现产品金额动态计算 5.综合演示 ① ...
- 逆向课程第二讲,寻找main入口点
逆向课程第二讲,寻找main入口点 一丶识别各个程序的入口点 入门知识,识别各个应用程序的入口点 (举例识别VC 编译器生成,以及VS编译生成的Debug版本以及Release版本) 1.识别VC6. ...
随机推荐
- (九)ELF和动态链接
前言: 我们都知道我们所写的程序是被编译为一条条的CPU指令去执行的,但是在linux系统下能够运行的程序在windows环境下却运行不起来,但是我们使用的CPU明明是一样的,这又是为什么呢? 一.程 ...
- activiti笔记
activiti笔记 核心api api介绍 1.ProcessEngine 说明: 1) 在Activiti中最核心的类,其他的类都是由他而来. 2) 产生方式: ProcessEngine pro ...
- 记一次bug思考过程:HibernateException: Could not obtain transaction-synchronized Session for current thread
场景:把从客户端提交的任务放到线程池执行 异常:HibernateException: Could not obtain transaction-synchronized Session for cu ...
- GBK宽字节注入SQL
SQL注入:宽字节注入(GBK双字节绕过) 2015-06-09lyiang 宽字节注入的作用是非常大的,实际上在代码层的防御一般不外乎两种,一是反斜杠转义,而就是replace替换成空字节,之前的替 ...
- sails框架结合mocha
sails框架(testing&model and orm): http://sailsjs.org/documentation/concepts/testing orm(对象关系映射): h ...
- Python运算符可不只有加减乘除
数学里面的加减乘除,就是运算符,但是 Python 的运算符更多样,更复杂,分为算术运算符.比较运算符.赋值运算符.位运算符.逻辑运算符.成员运算符.身份运算符.为了更直观的看到运算符的使用,本文采用 ...
- datagrip2020最新安装破解教程方法激活码安装参数
现在,datagrip的版本已更新至2020.3,尚未升级的用户请赶快升级. 本文教您如何安装datagrip2020.3版本并破解它. 此方法可以100%永久激活datagrip2020.3(低版本 ...
- 「IOI2017」接线 的另类做法
看到这题,我的第一反应是:这就是一个费用流模型?用模拟费用流的方法? 这应该是可以的,但是我忘记了怎么模拟费用流了IOI不可能考模拟费用流.于是我就想了另外一个方法. 首先我们考虑模拟费用流的模型如下 ...
- AcWing 127. 任务
题目链接 参考y神的思路QWQ 算法:贪心 对于每一个任务: \(y\) 的差异最多能使利润\(w\)浮动\(2 * 100 = 200\)元. \(x\) 差\(1\),则会使利润\(w\)浮动\( ...
- ado.net使用sqlparameter的方式
使用sqlparameter的方式,最终执行的sql语句 exec sp_executesql N'select top 1 ID,ZhangHu,MiMa,RID,ShiJian,EndTime,I ...