在ROS系统下,获取tango的RGBD信息和Pose信息
Tango强大在于它的其服务于环境感知的SDK,其核心是三大组件:
- Motion Tracking
运动跟踪,Tango通过自身的传感器感知自身的6自由度信息。这部分是三大组件的核心功能。具体上来讲,tango使用视觉+惯性器件,实现了VIO(visual-inertial odometry)算法,下面会进一步介绍。
- Depth Perception
深度感知,主要是通过Tango搭载的深度传感器的原始数据生成点云,服务于一些3D建模的应用。
- Area Learning
区域建模,可以认为是在motion tracking 基础上的一个增强。它可以将之前走过的路径记录下来,同时生成空间中的3D landmark,这些信息可以用于下一次开机之后的重定位。这个功能可以使用户可以在已经建模好的地图中定位自己,减小误差。
Motion tracking 是tango SDK的最核心。
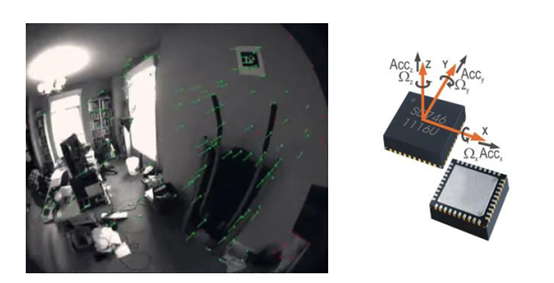
VIO融合对空间中视觉特征以及惯性测量的观测,来定位。上图中绿色的就是tango提取的特征点,VIO融合两种传感器信息,解决尺度漂移的同时也估计了IMU的bias。
其实如果tango作为精确传感器数据融合的一个工具,是kinect非常棒的替代品,在机器人SLAM领域可以有更多应用。最近我在做的一个工作就是将tango中的数据提取出来,通过tango VIO精确定位,实现对室内场景的更好定位。
1、安装 Tango ROS Streamer
Tango ROS Streamer是一款适用于探戈设备的Android应用程序和ROS节点。其主要目的是为ROS生态系统提供Tango传感器数据,以便在机器人上轻松使用Tango功能。

详细安装看介绍,一般来说联想国行坑爹的tango不会有这个APK,也不会让你上Google play上下载这个apk(多方证实,不要再浪费精力)。所以还是在网上找个老版本的APK下载下来使用。
只要你的14.04安装好了ROS,那么你就可以通过 配置文件 可视化从tango获取的数据
rosrun rviz rviz -d <path_to_rviz_config_file>
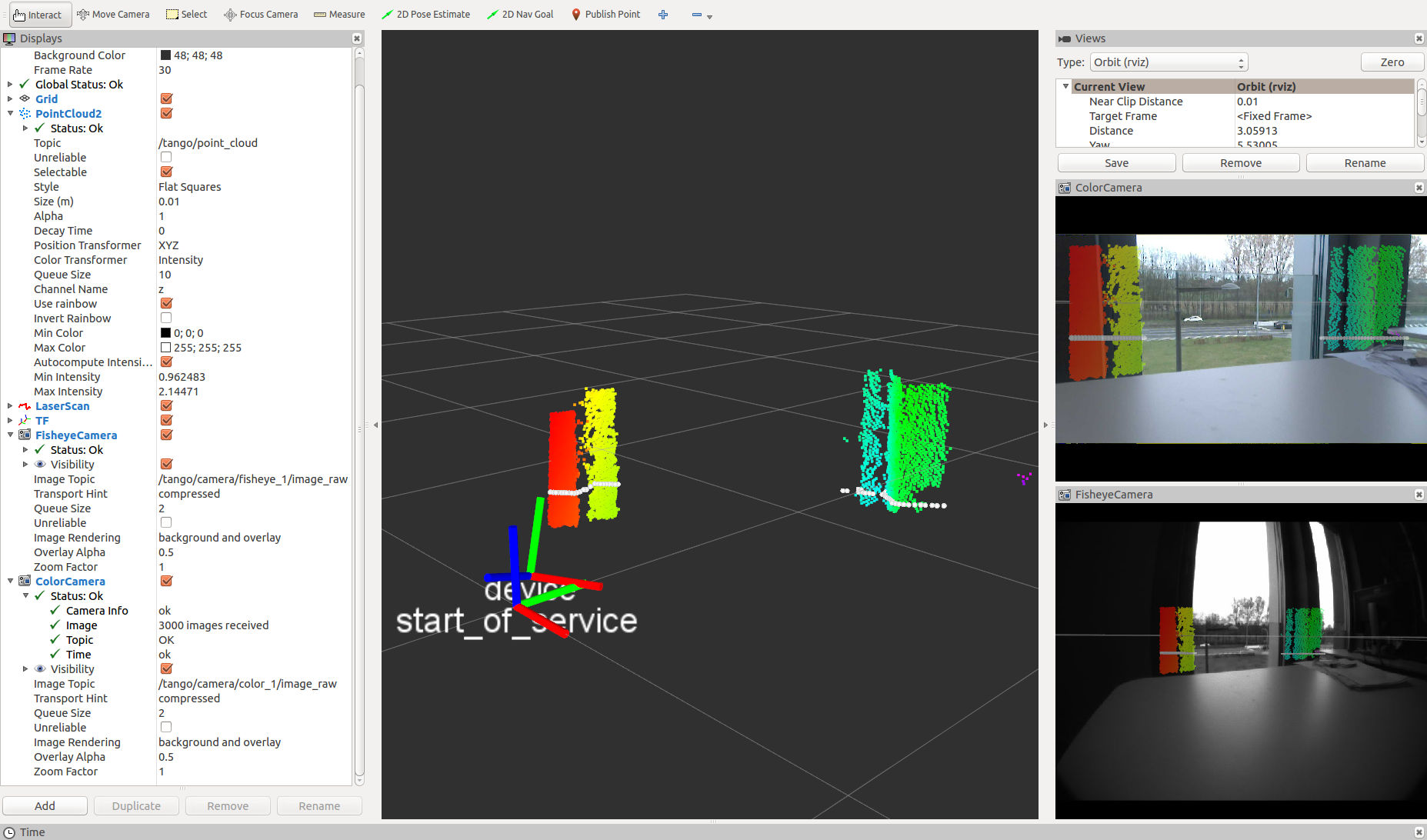
上面两步,我们已经能订阅tango的topic,获得tango的这些信息
android/imu (sensor_msgs/Imu)
IMU message from the Android sensors.
tango/camera/color_1/camera_info (sensor_msgs/CameraInfo)
Camera info of the Tango device color camera.
tango/camera/color_1/image_raw (sensor_msgs/Image)
Image of the Tango device color camera.
tango/camera/color_1/image_rect (sensor_msgs/Image)
Rectified image of the Tango device color camera.
tango/camera/fisheye_1/camera_info (sensor_msgs/CameraInfo)
Camera info of the Tango device fisheye camera. The fisheye camera data is not available on devices with API level > 23. This topic is therefore not advertised for these devices.
tango/camera/fisheye_1/image_raw (sensor_msgs/Image)
Image of the Tango device fisheye camera. The fisheye camera data is not available on devices with API level > 23. This topic is therefore not advertised for these devices.
tango/camera/fisheye_1/image_rect (sensor_msgs/Image)
Rectified image of the Tango device fisheye camera. The fisheye camera data is not available on devices with API level > 23. This topic is therefore not advertised for these devices.
tango/laser_scan (sensor_msgs/LaserScan)
Laser scan message created from the Tango point cloud, expressed in laser frame.
tango/point_cloud (sensor_msgs/PointCloud2)
Point cloud of the Tango device depth sensor, expressed in camera_depth frame.
然而我们无法获取深度图信息,我们只有上面的point cloud信息。
目前我发现最容易获取深度图信息的方法只有我找到了。
3、安装rtabmap_ros
rosrun rtabmap_ros pointcloud_to_depthimage cloud:=/tango/point_cloud camera_info:=/tango/camera/color_1/camera_info _fixed_frame_id:=start_of_service _decimation:=8 _fill_holes_size:=5
当然安装rtabmap_ros也有很多坑,分别通过stark overflow还有ros wiki基本能解决。比如opencv中有未定义函数啥的,这个我后面再整理。建议下载最新的rtabmao_ros源文件编译执行。
坑1:The general issue is with the "nonfree" parts of opencv,需要重新编译opencv,关闭opencl编译
cmake -D CMAKE_BUILD_TYPE=RELEASE -D WITH_OPENCL=OFF -D CMAKE_INSTALL_PREFIX=/usr/local .安装opencv TIP:
1、依赖包
[compiler] sudo apt-get install build-essential
[required] sudo apt-get install cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev
[optional] sudo apt-get install python-dev python-numpy libtbb2 libtbb-dev libjpeg-dev libpng-dev libtiff-dev libjasper-dev libdc1394-22-dev
2、编译安装
unzip opencv-2.4.13.zip
cd opencv-2.4.13/
cmake -D CMAKE_BUILD_TYPE=RELEASE -D WITH_OPENCL=OFF -D CMAKE_INSTALL_PREFIX=/usr/local .
make # make -j4表示开4个线程来进行编译
make install
上面的命令执行后,就能在topic list里找到深度图的话题了。
在ROS系统下,获取tango的RGBD信息和Pose信息的更多相关文章
- win10 系统下获取系统版本号为6.2的问题(manifest如何写)
近期赶时髦升级了win10,用着挺爽.但是某天在测试一个bug时发现要对win10做特殊处理,于是直接调用了GetVersionEx,并取出版本号进行判断,但是发现得到的版本竟然是6.2.当时就被雷到 ...
- win10 系统下获取系统版本号为6.2的问题
近期赶时髦升级了win10,用着挺爽.但是某天在测试一个bug时发现要对win10做特殊处理,于是直接调用了GetVersionEx,并取出版本号进行判断,但是发现得到的版本竟然是6.2.当时就被雷到 ...
- 【cartogarpher_ros】一: ros系统下的快速安装
Cartographer是一个跨多个平台和传感器配置提供 2D 和 3D实时同步定位和映射 ( SLAM ) 的系统. 使用Cartographer有Ros集成环境和无Ros环境,对于新手快速入门,推 ...
- linux系统下获取IP,MAC,子网掩码,网关
获取IP和子网掩码 int getLocalInfo(char IP[],char Mask[]) { int fd; int interfaceNum = 0; struct ifreq buf[1 ...
- 怎样在windows下和linux下获取文件(如exe文件)的具体信息和属性
版权声明:本文为博主原创文章.未经博主同意不得转载. https://blog.csdn.net/xmt1139057136/article/details/25620685 程序猿都非常懒.你懂的! ...
- 使用dmidecode在Linux下获取硬件信息
dmidecode命令可以让你在Linux系统下获取有关硬件方面的信息.dmidecode的作用是将DMI数据库中的信息解码,以可读的文本方式显示.由于DMI信息可以人为修改,因此里面的信息不一定是系 ...
- Unix/Linux系统下获得时间戳函数
在Unix/Linux系统下,使用gettimeofday函数来获得当前系统的时间戳,精度可达到微秒(microsecond,即μs)级别. 通过结构体timeval来存放当前时间戳的信息: #ifn ...
- Linux系统下基本命令
<Linux系统下基本命令> Linux系统下基本命令: 要区分大小写 uname 显示版本信息(同win2K的 ver) dir 显示当前目录文件,ls -al 显示包括隐藏文件(同wi ...
- ROS下利用realsense采集RGBD图像合成点云
摘要:在ROS kinetic下,利用realsense D435深度相机采集校准的RGBD图片,合成点云,在rviz中查看点云,最后保存成pcd文件. 一. 各种bug 代码编译成功后,打开rviz ...
随机推荐
- 【説明する】hash
首先对于判重,我们能想到的方法有什么呢? 1)bool数组 2)set(集) 数组与集合的优缺点: 1.因为集合是对数组做的封装,所以,数组永远比任何一个集合要快. 2.数组声明了它容纳的元素的类型, ...
- 爬虫与seo优化
爬虫及爬行方式 爬虫有很多名字,比如web机器人.spider等,它是一种可以在无需人类干预的情况下自动进行一系列web事务处理的软件程序.web爬虫是一种机器人,它们会递归地对各种信息性的web站点 ...
- jsp页面中的EL表达式不被解析org.apache.jasper.JasperException: Unable to convert string [${item.createtime}]
https://m.imooc.com/qadetail/277572 web.xml的版本是不是2.3, 如果是2.3,在jsp页面开头添加<%@ page isELIgnored=" ...
- js的模块化之路
在ES6之前,官方没有出来import export这种模块化的语法. 为了提高代码复用.避免污染全局,民间写了很多模块化的实现: 1. 立即执行函数 (function(globalVariable ...
- 使用C#代码调用Web API
1. POST POST的参数需要加上[FromBady],且参数只能一个 客户端提交数据的时候ContentType 为 application/x-www-form-urlencoded 或者 a ...
- GO 包相关
1 包编译,eg: 引用pkgtest包 pkgtest包没有任何编译,项目直接导入引用,项目编译时实际是会编译pkgtest并在pkg\windows_386下生成pkgtest.a文件 再编译项目 ...
- numpy模块-渐入佳境
1.多维数组降为一维: numpy中的ravel().flatten().squeeze()的用法与区别 2. axis的理解 Python之NumPy(axis=0/1/2...)的透彻理解——通过 ...
- Beta冲刺(2/4)
队名:福大帮 组长博客链接:https://www.cnblogs.com/mhq-mhq/p/11990570.html 作业博客 : https://edu.cnblogs.com/campus/ ...
- 实现一个微信小程序组件:文字跑马灯效果
marquee.json { "component": true, "usingComponents": {} } marquee.wxml <!--co ...
- Android:StateMachine 之 WifiStateMachine
一.状态图: 二.代码分析: \frameworks\opt\net\wifi\service\java\com\android\server\wifi\WifiStateMachine.java 1 ...