OpenCV常用基本处理函数(6)图像梯度
形态学转换
腐蚀
img = cv2.imread('j.png',)
kernel = np.ones((,),np.uint8)
erosion = cv2.erode(img,kernel,iterations = )
膨胀
dilation = cv2.dilate(img,kernel,iterations = )
先进性腐蚀再进行膨胀就叫做开运算。就像我们上面介绍的那样,它被用来去除噪声。这里我们用到的函数是 cv2.morphologyEx()。
opening = cv2.morphologyEx(img, cv2.MORPH_OPEN, kernel)

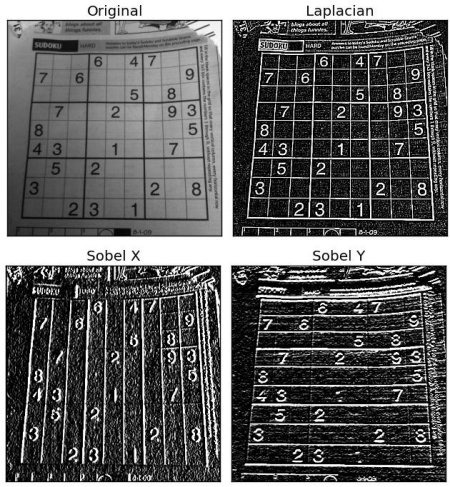
图像梯度
梯度简单来说就是求导,对于像素点的分布曲线求导,然后在像素变化较大的地方即为边缘,通过求导可以求出边缘的位置。
OpenCV 提供了三种不同的梯度滤波器,或者说高通滤波器:Sobel,Scharr 和 Laplacian
Sobel,Scharr 其实就是求一阶或二阶导数。Scharr 是对 Sobel(使用小的卷积核求解求解梯度角度时)的优化。Laplacian 是求二阶导数。
laplacian = cv2.Laplacian(img,cv2.CV_64F)
sobelx = cv2.Sobel(img,cv2.CV_64F,1,0,ksize=5)
sobely = cv2.Sobel(img,cv2.CV_64F,0,1,ksize=5)
效果如图:
Candy边缘检测
1.去除噪声,高斯核
2.计算梯度
3.进行运算
4.非极大值抑制
5.设置两个阈值(图像的灰度梯度高于 maxVal 时被认为是真的边界,那些低于 minVal 的边界会被抛弃。如果介于两者之间的话,就要看这个点是否与某个被确定为真正的边界点相连,如果是就认为它也是边界点,如果不是就抛弃)
在OpenCV中通过cv2.Canny()来进行,这个函数的第一个参数是输入图像。第二和第三个分别是 minVal 和 maxVal。第三个参数设置用来计算图像梯度的 Sobel卷积核的大小,默认值为 3。最后一个参数是 L2gradient,它可以用来设定求梯度大小的方程。如果设为 True,就会使用我们上面提到过的方程,否则使用方程: . 代替,默认值为 False。
. 代替,默认值为 False。
例如:
edges = cv2.Canny(img,100,200) 参考自: 参考自:https://www.cnblogs.com/Undo-self-blog/p/8439149.html
OpenCV常用基本处理函数(6)图像梯度的更多相关文章
- Python+OpenCV图像处理(十二)—— 图像梯度
简介:图像梯度可以把图像看成二维离散函数,图像梯度其实就是这个二维离散函数的求导. Sobel算子是普通一阶差分,是基于寻找梯度强度.拉普拉斯算子(二阶差分)是基于过零点检测.通过计算梯度,设置阀值, ...
- OpenCV常用数据结构和函数
点的表示:Point类 Point类数据结构表示二维坐标系下的点,即由其图像坐标x,y指定的2D点. 用法如下 Point point; point.x = 10; point.y = 8; 或者 P ...
- OpenCV常用基本处理函数(7)图像金字塔和直方图
高斯金字塔 高斯金字塔的顶部是通过将底部图像中的连续的行和列去除得到的.顶部图像中的每个像素值等于下一层图像中 5 个像素的高斯加权平均值. 这样操作一次一个 MxN 的图像就变成了一个 M/2xN/ ...
- OpenCV常用基本处理函数(2)图像基本操作
可以根据像素的行和列的坐标获取他的像素值.对 BGR 图像而言,返回值为 B,G,R 例如获取蓝色的像素值: img=cv2.imread('messi5.jpg')px=img[100,100]bl ...
- OpenCV常用基本处理函数(8)图像变换
傅里叶变换 傅里叶变换在实际中有非常明显的物理意义,设f是一个能量有限的模拟信号,则其傅里叶变换就表示f的频谱. 图像的频率是表征图像中灰度变化剧烈程度的指标,是灰度在平面空间上的梯度.如:大面积的沙 ...
- OpenCV常用基本处理函数(5)图像模糊
2D卷积操作 cv.filter2D() 可以让我们对一幅图像进行卷积操作, 图像模糊(图像平滑)使用低通滤波器可以达到图像模糊的目的.这对与去除噪音很有帮助.其实就是去除图像中的高频成分(比如:噪音 ...
- OpenCV常用基本处理函数(4)简单变换,阈值等
几何变换 缩放 img=cv2.imread('messi5.jpg') # 下面的 None 本应该是输出图像的尺寸,但是因为后边我们设置了缩放因子 # 因此这里为 None res=cv2.res ...
- OpenCV常用基本处理函数(3)颜色空间
颜色空间转换 对图像进行颜色空间转换,比如从 BGR 到灰度图,或者从BGR 到 HSV 等 我们要用到的函数是:cv2.cvtColor(input_image ,flag),其中 flag就是转换 ...
- [opencv]常用阵列操作函数总结
/*=========================================================================*/ // 阵列操作 /*============ ...
随机推荐
- jQuery给css增加!important
<div id='ele' style=''width:200px!important"><div> JS $("#el").css(" ...
- boost range
1.Algorithms Boost.Range is library that, on the first sight, provides algorithms similar to those p ...
- 前端自动化-gulp入门
前不久本人写了一篇关于gulp安装和配置的文章,其实当时还是懵逼的状态,但是今天再次温习了一遍,感觉对整个流程有个整体的理解了,下面以一个实例给大家分享下我的经验供参考和学习. 1.首先安装nodej ...
- paper 162:卷积神经网络(CNN)解析
卷积神经网络(CNN)解析: 卷积神经网络CNN解析 概揽 Layers used to build ConvNets 卷积层Convolutional layer 池化层Pooling Layer ...
- paper 159:文章解读:From Facial Parts Responses to Face Detection: A Deep Learning Approach--2015ICCV
文章链接:https://arxiv.org/pdf/1509.06451.pdf 1.关于人脸检测的一些小小总结(Face Detection by Literature) (1)Multi-vie ...
- linux系统下tomcat应用开机自启动 配置
linux系统下tomcat应用开机自启动 配置 相对简单的方式是将tomcat添加为系统服务第一步 复制文件将 $Tomcat_Home/bin目录下的 catalina.sh脚本文件复制到目录/ ...
- AGC013 E Placing Squares——模型转化+矩阵乘法
题目:https://atcoder.jp/contests/agc013/tasks/agc013_e 边长的平方,可以看做是在该范围内放两个不同的球的方案数.两个球可以重合. 题意变成:给长为 n ...
- 软件-Axure:Axure RP
ylbtech-软件-Axure:Axure RP Axure RP是一款专业的快速原型设计工具.Axure(发音:Ack-sure),代表美国Axure公司:RP则是Rapid Prototypin ...
- selenium2-java 浏览器cookie的获取
//成功登陆后增加如下代码 File cookieFile = new File("C:\\tmp\\tangdai.cookie.txt"); ...
- 在windows下用脚手架搭建vue环境
做了几个月vue项目,最近两个项目使用脚手架搭建的,确实用脚手架搭建方便了许多,想想以前自己手配的时候,确实是... 1.在这之前我是默认你已经使用过vue的,也默认你已经安装了node.js 2.接 ...