Minimum Snap轨迹规划详解(1)轨迹规划
一. 轨迹规划是什么?
在机器人导航过程中,如何控制机器人从A点移动到B点,通常称之为运动规划。运动规划一般又分为两步:
1、路径规划:在地图(栅格地图、四\八叉树、RRT地图等)中搜索一条从A点到B点的路径,由一系列离散的空间点(waypoint)组成。
2、轨迹规划:由于路径点可能比较稀疏、而且不平滑,为了能更好的控制机器人运动,需要将稀疏的路径点变成平滑的曲线或稠密的轨迹点,也就是轨迹。
2. 轨迹是什么?注意低次项在前
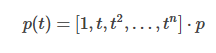
轨迹一般用n阶多项式(polynomial)来表示,即

其中p0,p1,...,pn为轨迹参数(n+1个),设参数向量p=[p0,p1,...,pn]T,则轨迹可以写成向量形式。
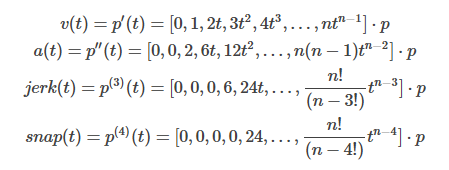
对于任意时刻t,可以根据参数计算出轨迹的位置P(osition),速度V(elocity),加速度A(cceleration),jerk,snap等。
一个多项式曲线过于简单,一段复杂的轨迹很难用一个多项式表示,所以将轨迹按时间分成多段,每段各用一条多项式曲线表示,形如:
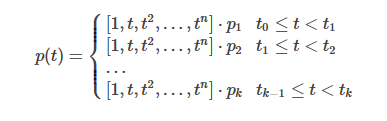
k为轨迹的段数, 为第i段轨迹的参数向量。
为第i段轨迹的参数向量。
此外,实际问题中的轨迹往往是二维、三维甚至更高维,通常每个维度单独求解轨迹。
3. Minimum Snap轨迹规划
轨迹规划的目的:求轨迹的多项式参数p1,...,pk。
我们可能希望轨迹满足一系列的约束条件,比如:希望设定起点和终点的位置、速度或加速度,希望相邻轨迹连接处平滑(位置连续、速度连续等),希望轨迹经过某些路径点,设定最大速度、最大加速度等,甚至是希望轨迹在规定空间内(Obstruction check)等等。
通常满足约束条件的轨迹有无数条,而实际问题中,往往需要一条特定的轨迹,所以又需要构建一个最优的函数,在可行的轨迹中找出“最优”的那条特定的轨迹。 所以,我们将问题建模(fomulate)成一个约束优化问题,形如:
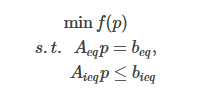
这样,就可以通过最优化的方法求解出目标轨迹参数p。注意:这里的轨迹参数p是多端polynomial组成的大参数向量
我们要做的就是:将优化问题中的f(p)函数和Aeq,beq,Aieq,bieq参数给列出来,然后丢到优化器中求解轨迹参数p。
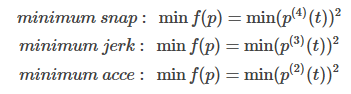
Minimum Snap顾名思义,Minimum Snap中的最小化目标函数是Snap(加速度的二阶导),当然你也可以最小化Acceleration(加速度)或者Jerk(加速度的导数),至于它们之间有什么区别,quora上有讨论。一般不会最小化速度。
4. 一个简单的例子
给定包含起点终点在内的k+1个二维路径点pt0,pt1,...,ptk,pti=(xi,yi),给定起始速度和加速度为v0,a0,末端加速度为ve,ae,给定时间T,规划出经过所有路径点的平滑轨迹。
a. 初始轨迹分段与时间分配
根据路径点,将轨迹分为k段,计算每段的距离,按距离平分时间T(匀速时间分配),得到时间序列t0,t1,...,tk。对x,y维度单独规划轨迹。后面只讨论一个维度。
时间分配的方法:匀速分配或梯形分配,假设每段polynomial内速度满足匀速或梯形速度变化,根据每段的距离将总时间T分配到每段。
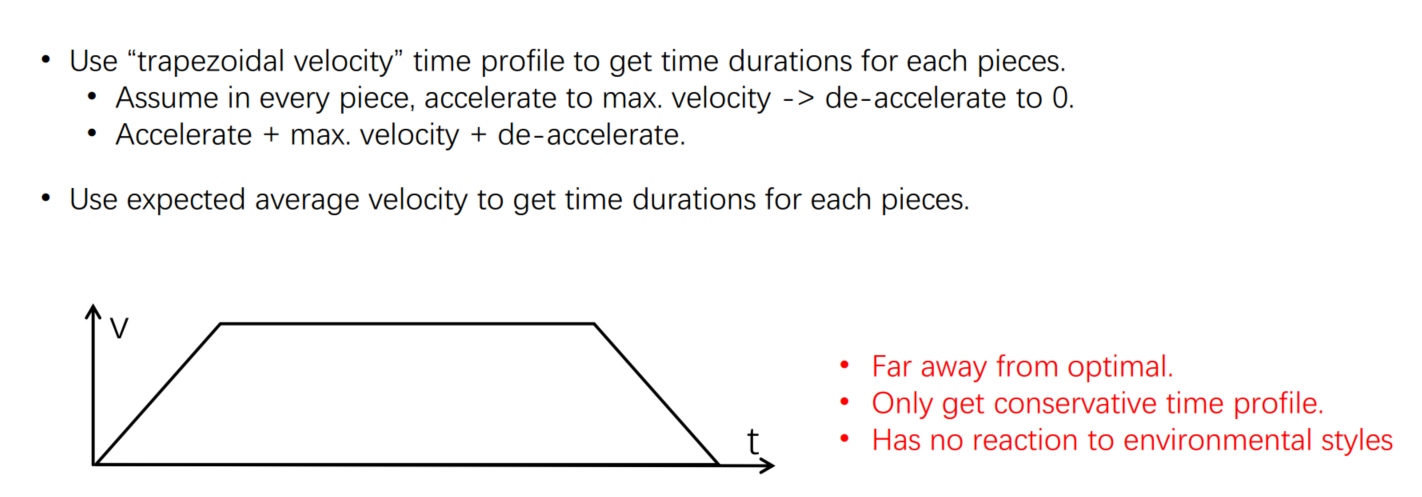
这里的轨迹分段和时间分配都是初始分配,在迭代算法中,如果 Obstruction check和 feasibility check不满足条件,会插点或增大某一段的时间。
b. 构建优化函数
Minimum Snap的优化函数为:
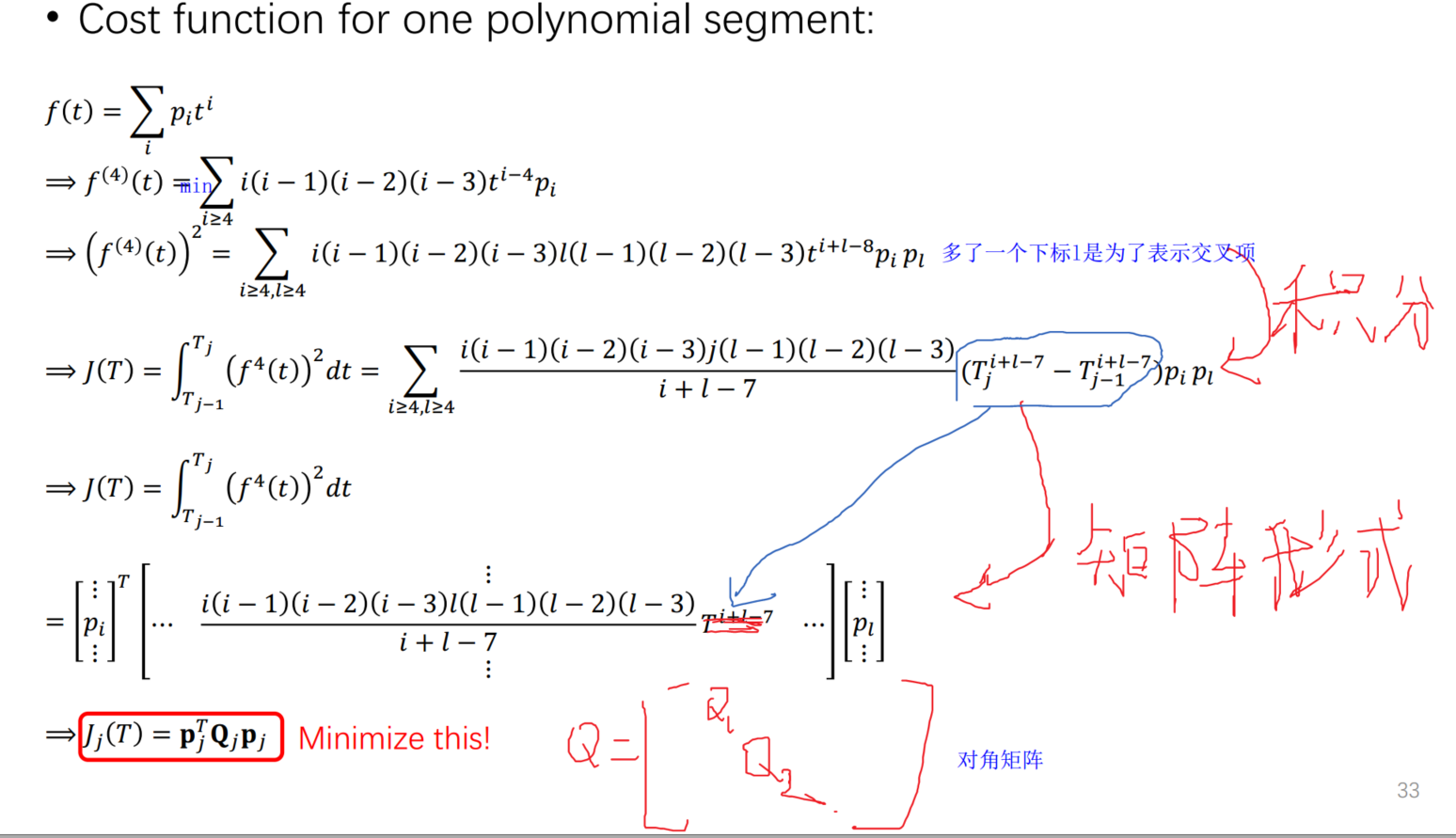
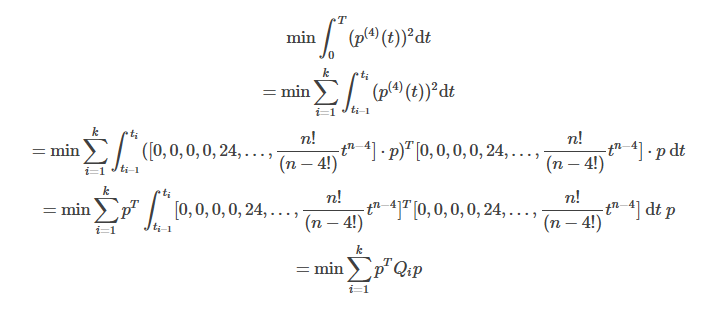
其中,
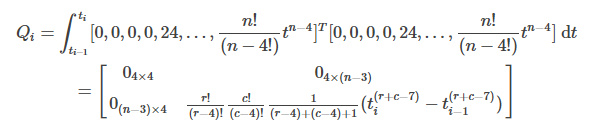
注意:r,c为矩阵的行索引和列索引,索引从0开始,即第一行 r=0。
可以看到,问题建模成了一个数学上的二次规划(Quadratic Programming,QP)问题。
c. 构建等式约束方程
- 设定某一个点的位置、速度、加速度或者更高为一个特定的值,可以构成一个等式约束。

例如:
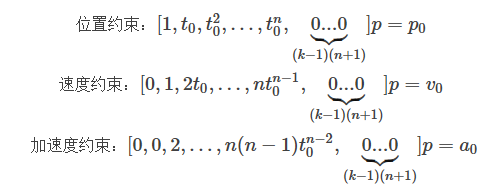
由于要过中间点,对中间点的位置也构建等式约束,方法同上。
2. 相邻段之间的位置、速度、加速度连续可以构成一个等式约束
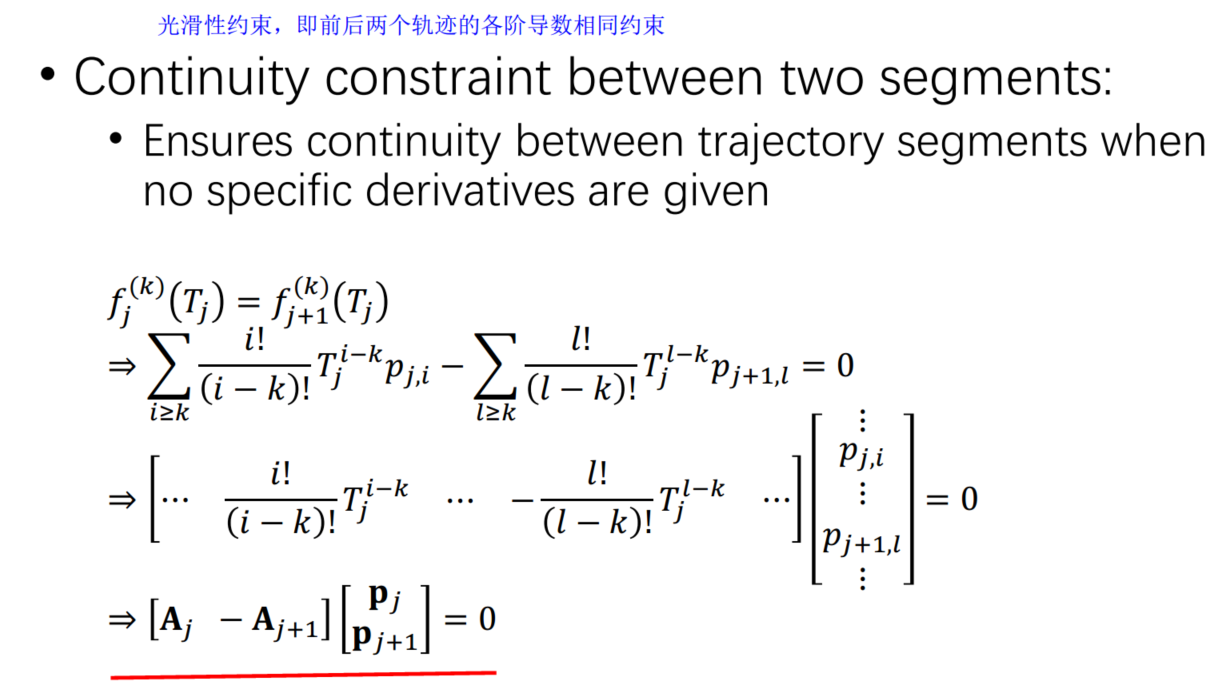
例如第i、i+1段的位置连续构成的等式约束为

合并所有等式约束,得到
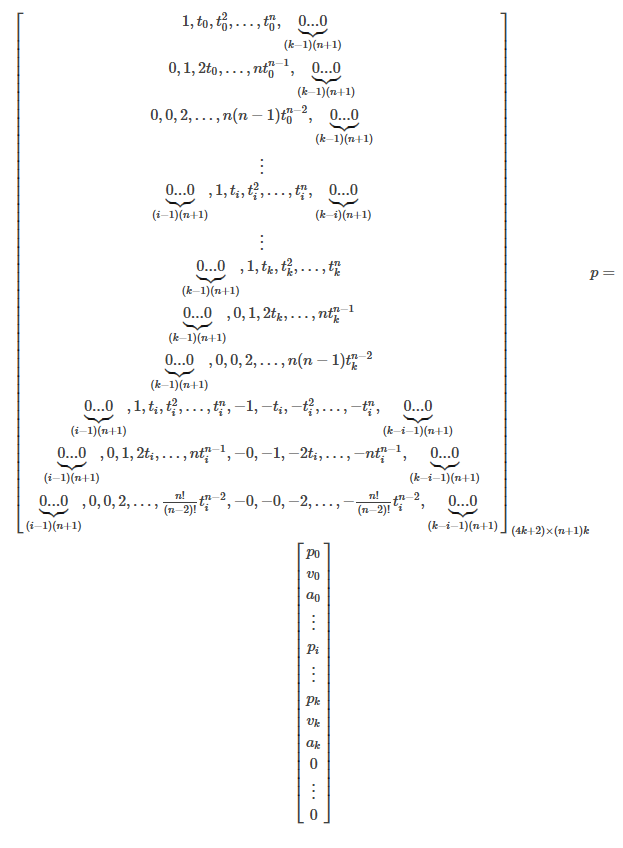
等式约束个数=3(起始PVA)+k-1(中间点的p)+3(终点pva)+3(k-1)(中间点PVA连续)=4k+2。
d. 构建不等式约束
不等式约束与等式约束类似,也是设置某个点的P、V、A小于某一特定值,从而构建Aieqp=bieq
,不等式约束一般是在corridor中用的比较多,这里暂时先不使用不等式约束。
e. 求解
利用QP求解器进行求解,在MATLAB中可以使用quadprog() 函数,C++的QP求解器如OOQP,也可以自己去网上找。
参考资料:
1、深蓝学院
2、https://blog.csdn.net/q597967420/article/details/76099491
Minimum Snap轨迹规划详解(1)轨迹规划的更多相关文章
- Minimum Snap轨迹规划详解(3)闭式求解
如果QP问题只有等式约束没有不等式约束,那么是可以闭式求解(close form)的.闭式求解效率要快很多,而且只需要用到矩阵运算,不需要QPsolver. 这里介绍Nicholas Roy文章中闭式 ...
- 企业sudo权限规划详解 (实测一个堆命令搞定)
简述问题: 随着公司的服务器越来越多,人员流动性也开始与日俱增,以往管理服务器的陈旧思想应当摒弃,公司需要有 更好更完善的权限体系,经过多轮沟通和协商,公司一致决定重新整理规划权限体系 ...
- lattice planner 规划详解
大家好,我是来自百度智能驾驶事业群的许珂诚.今天很高兴能给大家分享Apollo 3.0新发布的Lattice规划算法. Lattice算法隶属于规划模块.规划模块以预测模块.routing模块.高精地 ...
- Minimum Snap轨迹规划详解(2)corridor与时间分配
在上一篇文章中,我们得到的轨迹并不是很好,与路径差别有点大,我们期望规划出的轨迹跟路径大致重合,而且不希望有打结的现象,而且希望轨迹中的速度和加速度不超过最大限幅值.为了解决这些问题有两种思路: 思路 ...
- Kubernetes K8S之通过helm部署metrics-server与HPA详解
Kubernetes K8S之通过helm部署metrics-server与 Horizontal Pod Autoscaling (HPA)详解 主机配置规划 服务器名称(hostname) 系统版 ...
- Usage、Usage Minimum和Usage Maximum项目详解
(1)一个产生多个数据域(Report Count>1)的主项目之前有一个以上的[用途]时,每个[用途]与一个数据域依次对应,如果数据域个数(Report Count)超过[用途]的个数,则剩余 ...
- 超级强大的SVG SMIL animation动画详解
本文花费精力惊人,具有先驱前瞻性,转载规则以及申明见文末,当心予以追究.本文地址:http://www.zhangxinxu.com/wordpress/?p=4333 //zxx: 本文的SVG在有 ...
- [转]超级强大的SVG SMIL animation动画详解
超级强大的SVG SMIL animation动画详解 本文花费精力惊人,具有先驱前瞻性,转载规则以及申明见文末,当心予以追究.本文地址:http://www.zhangxinxu.com/wordp ...
- org.apache.log4j.Logger详解
org.apache.log4j.Logger 详解 1. 概述 1.1. 背景 在应用程序中添加日志记录总的来说基于三个目的 :监视代码中变量的变化情况,周期性的记录到文件中供其他应用进行统计分析工 ...
随机推荐
- Python--数据类型与变量(列表、元祖、字典)
今天我们来看Python中3种內建的数据结构:列表.元祖和字典 列表 定义:[]内以逗号分隔,按照索引,存放各种数据类型,每个位置代表一个元素特性:1.可存放多个值2.可修改指定索引位置对应的值,可变 ...
- 有关于css的四种布局
四种布局 (1).左右两侧,左侧固定宽度200px, 右侧自适应占满. (2).左中右三列,左右个200px固定,中间自适应占满. (3).上中下三行,头部200px高,底部200px高,中间自适应占 ...
- Django中ORM对数据库的增删改查操作
前言 什么是ORM? ORM(对象关系映射)指用面向对象的方法处理数据库中的创建表以及数据的增删改查等操作. 简而言之,就是将数据库的一张表当作一个类,数据库中的每一条记录当作一个对象.在 ...
- HTTP超详细总结
HTTP协议概述 HTTP协议是Hyper Text Transfer Protocol(超文本传输协议)的缩写,是用于从万维网(WWW:World Wide Web )服务器传输超文本到本地浏览器的 ...
- 十二、SpringBoot 优雅的集成Spring Security
前言 至于什么是Spring security ,主要两个作用,用户认证和授权.即我们常说的,用户只有登录了才能进行其他操作,没有登录的话就重定向到登录界面.有的用户有权限执行某一操作,而有的用户不能 ...
- 修改 DbVisualizer 自动完成快捷键
1.找到 DbVisualizer 安装目录 lib目录 下的 dbvis.jar 包. 2.使用 WinRaR 打开dbvis.jar包,编辑 dbvis-actions.xml 文件(解压或直接修 ...
- Oracle架构实现原理、含五大进程解析(图文详解)
目录 目录 前言 Oracle RDBMS架构图 内存结构 系统全局区SGA 高速缓存缓冲区数据库缓冲区 日志缓冲区 共享池 其他结构 进程结构 用户连接进程 用户进程User Process Ser ...
- python正常时间和unix时间戳相互转换的方法
python正常时间和unix时间戳相互转换的方法 本文实例讲述了python正常时间和unix时间戳相互转换的方法.分享给大家供大家参考.具体分析如下: 这段代码可以用来转换常规时间格式为unix时 ...
- Ajax,ajax封装
/** * Created by liyinghao on 2016/8/23. */ /*仿jQuery中的ajax方法,简单版实现;封装ajax的工具函数*/ /* * 1 请求方式 type g ...
- Reactor 反应堆设计模式
为了应对高并发的服务器端开发,微软在2009年提出了一种更优雅地实现异步编程的方式Reactive Programming即反应式编程.随后其他技术紧随其后,比如ES6通过引入类似的异步编程方式等. ...