寻路算法之A*算法详解
前言
在实际开发中我们会经常用到寻路算法,例如MMOARPG游戏魔兽中,里面的人物行走为了模仿真实人物行走的体验,会选择最近路线达到目的地,期间会避开高山或者湖水,绕过箱子或者树林,直到走到你所选定的目的地。这种人类理所当然的行为,在计算机中却需要特殊的算法去实现,常用的寻路算法主要有宽度最优搜索[1]、Dijkstra算法、贪心算法、A*搜索算法、B*搜索算法[2]、导航网格算法、JPS算法[3]等,学习这些算法的过程就是不断抽象人类寻路决策的过程。本文主要以一个简单空间寻路为例,对A*算法进行分析实现。
介绍
A*(A-Star)算法是一种静态路网中求解最短路径最有效的直接搜索方法,也是解决许多搜索问题的常用启发式算法,算法中的距离估算值与实际值越接近,最终搜索速度越快。之后涌现了很多预处理算法(如ALT,CH,HL等等),在线查询效率是A*算法的数千甚至上万倍。
问题
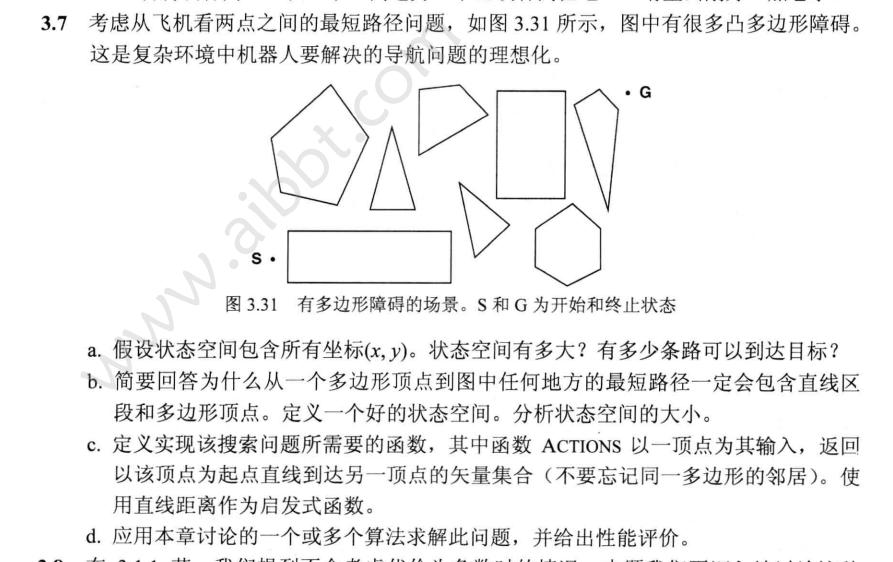
在包含很多凸多边形障碍的空间里,解决从起始点到终点的机器人导航问题。
步骤
地图预处理
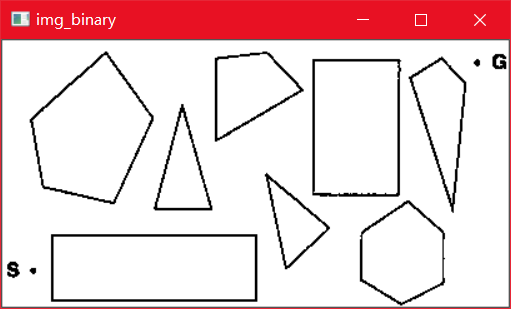
题中寻路地图包含在很多文字之中,且图中还包含logo,这都直接影响了寻路算法的使用,因此需要[将图片转程序易处理的数据结构]({{< ref "algorithm/image_to_data.md" >}})。预处理后地图如下:
算法思想
A*算法为了在获得最短路径的前提下搜索最少节点,通过不断计算当前节点的附近节点F(N)值来判断下次探索的方向,每个节点的值计算方法为:F(N)=G(N)+H(N)。
其中G(N)是从起点到当前节点N的移动消耗(比如低消耗代表平地、高消耗代表沙漠);H(N)代表当前节点到目标节点的预期距离,可以用使用曼哈顿距离、欧氏距离等。当节点间移动消耗G(N)非常小时,G(N)对F(N)的影响也会微乎其微,A*算法就退化为最好优先贪婪算法;当节点间移动消耗G(N)非常大以至于H(N)对F(N)的影响微乎其微时,A*算法就退化为Dijkstra算法。
算法步骤
整个算法流程为[4]:
- 设定两个集合:open集、close集
- 将起始点加入open集,其F值为0(设置父亲节点为空)
- 当open集合非空,则执行以下循环
3.1 在open集中移出一个F值最小的节点作为当前节点,并将其加入close集
3.2 如果当前节点为终点,则退出循环完成任务
3.3 处理当前节点的所有邻居节点,对于每个节点进行以下操作:
- 如果该节点不可达或在close集中则忽略该节点
- 计算该节点的F(N)值,并:如果该节点在open集中且F(N)大于当前F(N),则选择较小F(N)替换;否则将该节点加入open集
- 将该节点的父节点设置为当前节点
- 将该节点加入open集 - 搜索结束如果open集为空,则可能搜索到一条路径;如果open集非空,则必然搜索到一条路径,从终点不断遍历其父节点便是搜索路径。
代码实现
使用Python编写A*算法的核心代码为:
class AStar(object):
'''
@param {*} graph 地图
@param {*} start 开始节点
@param {*} goal 终点
'''
def __init__(self, graph, start, goal):
self.start = start
self.goal = goal
self.graph = graph
# 优先队列储存open集
self.frontier = PriorityQueue()
# 初始化起点
self.frontier.put(start)
'''
@description: 绘出最终路径
'''
def draw_path(self):
path = self.goal
matrix = self.graph.matrix
while path:
matrix[path.x][path.y] = 0
path = path.father
def run(self):
plt.ion()
n = 0
while not self.frontier.empty():
n = n + 1
current = self.frontier.get()
# 是否为终点
if current.equal(self.goal):
self.goal.father = current
self.draw_path()
return True
# 遍历邻居节点
for next in self.graph.neighbors(current):
# 计算移动消耗G
next.g = current.g + self.graph.cost(current, next)
# 计算曼哈顿距离H
next.manhattan(self.goal)
# 如果当前节点未在open集中
if not next.used:
next.used = True
# 将探索过的节点设为阴影,便于观察
self.graph.matrix[next.x][next.y] = 99
# 将当前节点加入open集
self.frontier.put(next)
# 设置该节点的父节点为当前节点
next.father = current
# 没100次更新一次图像
if n % 100 == 0:
plt.clf()
plt.imshow(self.graph.matrix)
plt.pause(0.01)
plt.show()
return False
寻路结果如下(其中黑实线是算法得出的最优路径,路径旁边的黑色地带是探索过的节点):

思考
本例中图像共有406×220像素,即有89320个像素点,也就是状态空间共有89320,可选线路最高有893202约为80亿种,虽然经过了简单的地图优化处理,但直接使用A*算法的效率还是很低。要想进一步提高搜索效率,可以引出另外一条定理:给定平面上一个起始点s和一个目标点g,以及若干多边形障碍物P1, P2, P3 ... Pk,由于两点间直线最短,故在所有从s到g的路径中,距离最短的路径的拐点一定在多边形顶点上。基于以上定理,我们可以人工将地图中的多边形顶点进行提取,再用A*算法对提取的顶点进行计算,即可在获得最短路径的同时大大增加了算法的效率。
完整代码
- 数据结构
from queue import PriorityQueue
import cv2
import math
import matplotlib.pyplot as plt
import fire
class Node(object):
def __init__(self, x=0, y=0, v=0, g=0, h=0):
self.x = x
self.y = y
self.v = v
self.g = g #g值
self.h = h #h值
self.used = False
self.father = None #父节点
'''
@description: 曼哈顿距离
@param {*} endNode 目标节点
'''
def manhattan(self, endNode):
self.h = (abs(endNode.x - self.x) + abs(endNode.y - self.y)) * 10
'''
@description: 欧拉距离
@param {*} self
@param {*} endNode
@return {*}
'''
def euclidean(self, endNode):
self.h = int(math.sqrt(abs(endNode.x - self.x)**2 + abs(endNode.y - self.y)**2)) * 30
'''
@description: 判断other节点与当前节点是否相等
@param {*} other
'''
def equal(self, other):
if self.x == other.x and self.y == other.y:
return True
else:
return False
'''
@description: 函数重载,为了满足PriorityQueue进行排序
@param {*} other
'''
def __lt__(self, other):
if self.h + self.g <= other.h + other.g:
return True
else:
return False
class Graph(object):
'''
@description: 类初始化
@param {*} matrix 地图矩阵
@param {*} maxW 地图宽
@param {*} maxH 地图高
'''
def __init__(self, matrix, maxW, maxH):
self.matrix = matrix
self.maxW = maxW
self.maxH = maxH
self.nodes = []
# 普通二维矩阵转一维坐标矩阵
for i in range(maxH):
for j in range(maxW):
self.nodes.append(Node(i, j, self.matrix[i][j]))
'''
@description: 检查坐标是否合法
@param {*} x
@param {*} y
'''
def checkPosition(self, x, y):
return x > 0 and x < self.maxH and y > 0 and y < self.maxW and self.nodes[x * self.maxW + y].v > 200
'''
@description: 寻找当前节点的邻居节点
@param {Node} node 当前节点
@return {*}
'''
def neighbors(self, node: Node):
ng = []
if self.checkPosition(node.x - 1, node.y):
ng.append(self.nodes[(node.x - 1) * self.maxW + node.y])
if self.checkPosition(node.x + 1, node.y):
ng.append(self.nodes[(node.x + 1) * self.maxW + node.y])
if self.checkPosition(node.x, node.y - 1):
ng.append(self.nodes[node.x * self.maxW + node.y - 1])
if self.checkPosition(node.x, node.y + 1):
ng.append(self.nodes[node.x * self.maxW + node.y + 1])
if self.checkPosition(node.x + 1, node.y + 1):
ng.append(self.nodes[(node.x + 1) * self.maxW + node.y + 1])
if self.checkPosition(node.x + 1, node.y - 1):
ng.append(self.nodes[(node.x + 1) * self.maxW + node.y - 1])
if self.checkPosition(node.x - 1, node.y + 1):
ng.append(self.nodes[(node.x - 1) * self.maxW + node.y + 1])
if self.checkPosition(node.x - 1, node.y - 1):
ng.append(self.nodes[(node.x - 1) * self.maxW + node.y - 1])
return ng
'''
@description: 画出结果路径
'''
def draw(self):
cv2.imshow('result', self.matrix)
cv2.waitKey(0)
cv2.destroyAllWindows()
'''
@description: 计算节点间移动消耗
@param {Node} current
@param {Node} next
@return {*}
'''
def cost(self, current: Node, next: Node):
return 11 if abs(current.x - next.x) + abs(current.y - next.y) > 1 else 10
class AStar(object):
'''
@param {*} graph 地图\n
@param {*} start 开始节点
@param {*} goal 终点
'''
def __init__(self, graph, start, goal):
self.start = start
self.goal = goal
self.graph = graph
# 优先队列储存open集
self.frontier = PriorityQueue()
# 初始化起点
self.frontier.put(start)
'''
@description: 绘出最终路径
'''
def draw_path(self):
path = self.goal
matrix = self.graph.matrix
while path:
matrix[path.x][path.y] = 0
path = path.father
def run(self):
plt.ion()
n = 0
while not self.frontier.empty():
n = n + 1
current = self.frontier.get()
# 是否为终点
if current.equal(self.goal):
self.goal.father = current
self.draw_path()
return True
# 遍历邻居节点
for next in self.graph.neighbors(current):
# 计算移动消耗G
next.g = current.g + self.graph.cost(current, next)
# 计算曼哈顿距离H
next.manhattan(self.goal)
# 如果当前节点未在open集中
if not next.used:
next.used = True
# 将探索过的节点设为阴影,便于观察
self.graph.matrix[next.x][next.y] = 99
# 将当前节点加入open集
self.frontier.put(next)
# 设置该节点的父节点为当前节点
next.father = current
# 没100次更新一次图像
if n % 100 == 0:
plt.clf()
plt.imshow(self.graph.matrix)
plt.pause(0.01)
plt.show()
return False
- 主程序
import cv2
from AStar import Node, AStar, Graph
src_path = "./map.png"
# 读取图片
img_grey = cv2.imread(src_path, cv2.IMREAD_GRAYSCALE)
# 去除水印
img_grey = cv2.threshold(img_grey, 200, 255, cv2.THRESH_BINARY)[1]
# 二值化
img_binary = cv2.threshold(img_grey, 128, 255, cv2.THRESH_BINARY)[1]
img_binary[:][0] = 0
img_binary[:][-1] = 0
img_binary[0][:] = 0
img_binary[-1][:] = 0
start = Node(180, 30)
goal = Node(20, 370)
maxH, maxW = img_binary.shape
graph = Graph(img_binary, maxW, maxH)
astar = AStar(graph, start, goal)
astar.run()
cv2.imshow('result', graph.matrix)
cv2.waitKey(0)
cv2.destroyAllWindows()
参考文献
wier. 深入理解游戏中寻路算法. OSChina. [2017-07-25] ︎
云加社区. 最快速的寻路算法 Jump Point Search. InfoQ. [2020-11-29] ︎
Amit Patel. Introduction to the A* Algorithm. redblobgames.com. [2014-05-26] ︎
寻路算法之A*算法详解的更多相关文章
- SSD算法及Caffe代码详解(最详细版本)
SSD(single shot multibox detector)算法及Caffe代码详解 https://blog.csdn.net/u014380165/article/details/7282 ...
- python 排序算法总结及实例详解
python 排序算法总结及实例详解 这篇文章主要介绍了python排序算法总结及实例详解的相关资料,需要的朋友可以参考下 总结了一下常见集中排序的算法 排序算法总结及实例详解"> 归 ...
- 关联规则算法(The Apriori algorithm)详解
一.前言 在学习The Apriori algorithm算法时,参考了多篇博客和一篇论文,尽管这些都是很优秀的文章,但是并没有一篇文章详解了算法的整个流程,故整理多篇文章,并加入自己的一些注解,有了 ...
- SSD(single shot multibox detector)算法及Caffe代码详解[转]
转自:AI之路 这篇博客主要介绍SSD算法,该算法是最近一年比较优秀的object detection算法,主要特点在于采用了特征融合. 论文:SSD single shot multibox det ...
- 算法笔记--sg函数详解及其模板
算法笔记 参考资料:https://wenku.baidu.com/view/25540742a8956bec0975e3a8.html sg函数大神详解:http://blog.csdn.net/l ...
- Floyd算法(三)之 Java详解
前面分别通过C和C++实现了弗洛伊德算法,本文介绍弗洛伊德算法的Java实现. 目录 1. 弗洛伊德算法介绍 2. 弗洛伊德算法图解 3. 弗洛伊德算法的代码说明 4. 弗洛伊德算法的源码 转载请注明 ...
- Floyd算法(二)之 C++详解
本章是弗洛伊德算法的C++实现. 目录 1. 弗洛伊德算法介绍 2. 弗洛伊德算法图解 3. 弗洛伊德算法的代码说明 4. 弗洛伊德算法的源码 转载请注明出处:http://www.cnblogs.c ...
- KMP算法的优化与详解
文章开头,我首先抄录一些阮一峰先生关于KMP算法的一些讲解. 下面,我用自己的语言,试图写一篇比较好懂的 KMP 算法解释. 1. 首先,字符串"BBC ABCDAB ABCDABCDABD ...
- Partition算法以及其应用详解上(Golang实现)
最近像在看闲书一样在看一本<啊哈!算法> 当时在amazon上面闲逛挑书,看到巨多人推荐这本算法书,说深入浅出简单易懂便买来阅读.实际上作者描述算法的能力的确令人佩服.就当复习常用算法吧. ...
- Dijkstra算法(二)之 C++详解
本章是迪杰斯特拉算法的C++实现. 目录 1. 迪杰斯特拉算法介绍 2. 迪杰斯特拉算法图解 3. 迪杰斯特拉算法的代码说明 4. 迪杰斯特拉算法的源码 转载请注明出处:http://www.cnbl ...
随机推荐
- 最新版的Dubbo Admin 3.0 本地启动方式
项目下载 项目地址:https://github.com/apache/dubbo-admin 如下图,使用git地址直接构建或者下载zip包构建源码都可以,我用的是下载的zip包, 项目架构说明 d ...
- tip2:Linux系统相关命令使用
好记忆不如烂笔头,很多东西不常用突然要用就是记得相关的命令但是具体就不确定了,本文记录个人不常用同时偶尔用到但不确定或者记不住的内容. 一.用户管理 这组个人使用频率不高,知道同时记不住具体涉及的系统 ...
- JMM之synchronized关键字
对于通讯,涉及两个关键字volatile和synchronized: Java支持多个线程同时访问一个对象或者对象的成员变量,由于每个线程可以拥有这个变量的拷贝(虽然对象及其成员变量分配的内存实在共享 ...
- nginx反向代理初体验
需求:部署两台tomcat,默认监听端口分别是8080和8081.访问nginx服务时,自动跳转到相应tomcat服务. 先部署一台机器:就宿主机上tomcat服务: 修改nginx配置:vim ng ...
- Python数据分析 | Numpy与1维数组操作
作者:韩信子@ShowMeAI 教程地址:http://www.showmeai.tech/tutorials/33 本文地址:http://www.showmeai.tech/article-det ...
- 深入理解Java类加载机制,再也不用死记硬背了
谈谈"会"的三个层次 在<说透分布式事务>中,我举例里说明了会与会的差别.对一门语言的学习,这里谈谈我理解的"会"的三个层次: 第一层:了解这门语言 ...
- DBCHM -最简单、最实用的数据库文档生成工具
项目介绍 DBCHM 是一款数据库文档生成工具! 该工具从最初支持chm文档格式开始,通过开源,集思广益,不断改进,又陆续支持word.excel.pdf.html.xml.markdown等文档格式 ...
- (一) operator、explicit与implicit 操作符重载
原文地址: Click Here 操作符重载必须用public static 应为操作符是用来操作实例的. operator operator ...
- Python 爬取 "王者荣耀.英雄壁纸" 过程中的矛和盾
1. 前言 学习爬虫,最好的方式就是自己编写爬虫程序. 爬取目标网站上的数据,理论上讲是简单的,无非就是分析页面中的资源链接.然后下载.最后保存. 但是在实施过程却会遇到一些阻碍. 很多网站为了阻止爬 ...
- 5.注入内部Bean
我们将定义在 <bean> 元素的 <property> 或 <constructor-arg> 元素内部的 Bean,称为"内部 Bean". ...