c++ 知道旋转前后矩阵向量值 求旋转矩阵c++/c#代码 知道两个向量求他们的旋转矩阵
原文作者:aircraft
原文链接:https://www.cnblogs.com/DOMLX/p/12115244.html
知道旋转前后矩阵向量值 如何去求旋转矩阵R 的c++/c#代码???
因为需要用到矩阵处理库所以需要先配置
一、Eigen库的配置(VS2017)
- Eigen库下载: http://eigen.tuxfamily.org/index.php?title=Main_Page
下载文件并解压:
然后在自己的VS工程属性中的这个附加包含进去
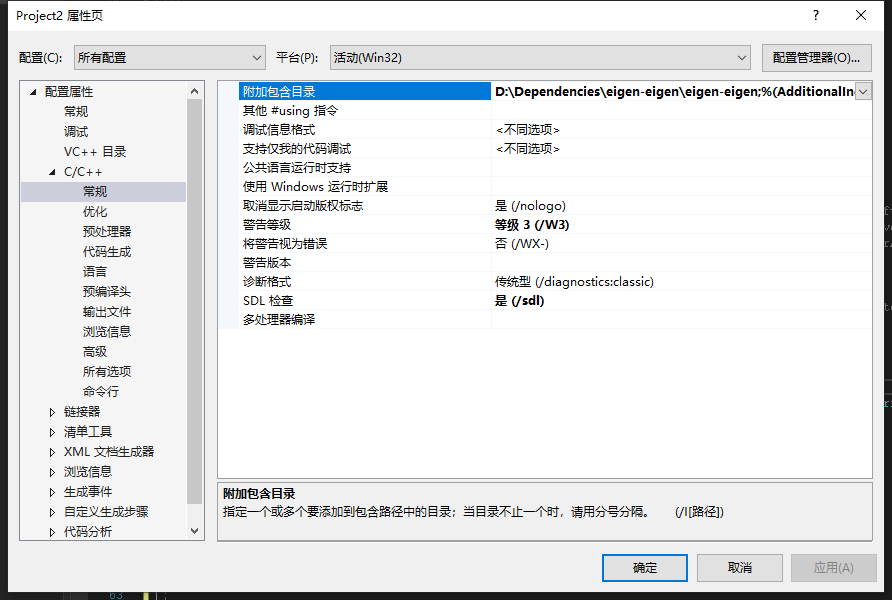
注意看清楚了 是D:\Dependencies\eigen-eigen\eigen-eigen; 前面部分是你们自己的路径 后面的这个eigen-eigen\eigen-eigen; 代表的意思解压是点击进去选择里面那个名字跟外面一样的
二、实现代码
c++代码:
#include <cmath>
#include <iostream>
#include "Eigen/Dense"
#include "Eigen/LU"
#include "Eigen/Core"
#define PI 3.1415926 //计算旋转角
double calculateAngle(const Eigen::Vector3d &vectorBefore, const Eigen::Vector3d &vectorAfter)
{
double ab, a1, b1, cosr;
ab = vectorBefore.x()*vectorAfter.x() + vectorBefore.y()*vectorAfter.y() + vectorBefore.z()*vectorAfter.z();
a1 = sqrt(vectorBefore.x()*vectorBefore.x() + vectorBefore.y()*vectorBefore.y() + vectorBefore.z()*vectorBefore.z());
b1 = sqrt(vectorAfter.x()*vectorAfter.x() + vectorAfter.y()*vectorAfter.y() + vectorAfter.z()*vectorAfter.z());
cosr = ab / a1 / b1;
return (acos(cosr) * / PI);
}
//计算旋转轴
inline Eigen::Vector3d calculateRotAxis(const Eigen::Vector3d &vectorBefore, const Eigen::Vector3d &vectorAfter)
{
return Eigen::Vector3d(vectorBefore.y()*vectorAfter.z() - vectorBefore.z()*vectorAfter.y(), \
vectorBefore.z()*vectorAfter.y() - vectorBefore.x()*vectorAfter.z(), \
vectorBefore.x()*vectorAfter.y() - vectorBefore.y()*vectorAfter.x());
}
//计算旋转矩阵
void rotationMatrix(const Eigen::Vector3d &vectorBefore, const Eigen::Vector3d &vectorAfter, Eigen::Matrix3d &rotMatrix)
{
Eigen::Vector3d vector = calculateRotAxis(vectorBefore, vectorAfter);
double angle = calculateAngle(vectorBefore, vectorAfter);
Eigen::AngleAxisd rotationVector(angle, vector.normalized());
Eigen::Matrix3d rotationMatrix = Eigen::Matrix3d::Identity();
rotMatrix = rotationVector.toRotationMatrix();//所求旋转矩阵
} int main()
{
Eigen::Matrix3d rotMatrix; Eigen::Vector3d vectorBefore(,,);
Eigen::Vector3d vectorAfter(,,);
rotationMatrix(vectorBefore, vectorAfter, rotMatrix);
std::cout << rotMatrix << std::endl;
system("pause");
return ;
}
打印结果:
c#代码:
void Calculation(double[] vectorBefore, double[] vectorAfter)
{
double[] rotationAxis;
double rotationAngle;
double[,] rotationMatrix;
rotationAxis = CrossProduct(vectorBefore, vectorAfter);
rotationAngle = Math.Acos(DotProduct(vectorBefore, vectorAfter) / Normalize(vectorBefore) / Normalize(vectorAfter));
rotationMatrix = RotationMatrix(rotationAngle, rotationAxis);
} double[] CrossProduct(double[] a, double[] b)
{
double[] c = new double[]; c[] = a[] * b[] - a[] * b[];
c[] = a[] * b[] - a[] * b[];
c[] = a[] * b[] - a[] * b[]; return c;
} double DotProduct(double[] a, double[] b)
{
double result;
result = a[] * b[] + a[] * b[] + a[] * b[]; return result;
} double Normalize(double[] v)
{
double result; result = Math.Sqrt(v[] * v[] + v[] * v[] + v[] * v[]); return result;
} double[,] RotationMatrix(double angle, double[] u)
{
double norm = Normalize(u);
double[,] rotatinMatrix = new double[,]; u[] = u[] / norm;
u[] = u[] / norm;
u[] = u[] / norm; rotatinMatrix[, ] = Math.Cos(angle) + u[] * u[] * ( - Math.Cos(angle));
rotatinMatrix[, ] = u[] * u[] * ( - Math.Cos(angle) - u[] * Math.Sin(angle));
rotatinMatrix[, ] = u[] * Math.Sin(angle) + u[] * u[] * ( - Math.Cos(angle)); rotatinMatrix[, ] = u[] * Math.Sin(angle) + u[] * u[] * ( - Math.Cos(angle));
rotatinMatrix[, ] = Math.Cos(angle) + u[] * u[] * ( - Math.Cos(angle));
rotatinMatrix[, ] = -u[] * Math.Sin(angle) + u[] * u[] * ( - Math.Cos(angle)); rotatinMatrix[, ] = -u[] * Math.Sin(angle) + u[] * u[] * ( - Math.Cos(angle));
rotatinMatrix[, ] = u[] * Math.Sin(angle) + u[] * u[] * ( - Math.Cos(angle));
rotatinMatrix[, ] = Math.Cos(angle) + u[] * u[] * ( - Math.Cos(angle)); return rotatinMatrix;
}
三、实现原理
1.旋转角度
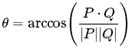
已知旋转前向量为P, 旋转后变为Q。由点积定义可知:
 可推出P,Q之间的夹角为:
可推出P,Q之间的夹角为:
2. 旋转轴
由1中可知,旋转角所在的平面为有P和Q所构成的平面,那么旋转轴必垂直该平面。
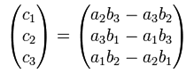
假定旋转前向量为a(a1, a2, a3), 旋转后向量为b(b1, b2, b3)。由叉乘定义得:

所以旋转轴c(c1, c2, c3)为:
3. 罗德里格旋转公式(Rodrigues' rotation formula)
3.1 公式
已知单位向量 , 将它旋转θ角。由罗德里格旋转公式,可知对应的旋转矩阵
, 将它旋转θ角。由罗德里格旋转公式,可知对应的旋转矩阵 :
:
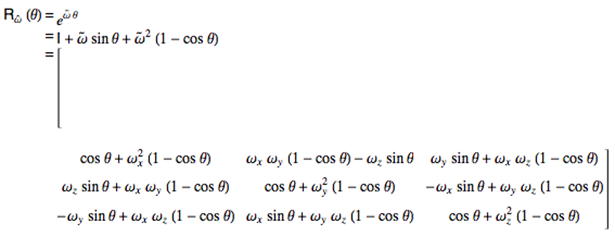
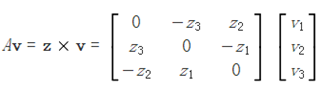
其中I是3x3的单位矩阵,
 是叉乘中的反对称矩阵r:
是叉乘中的反对称矩阵r:
3.2 公式证明
假设在坐标系(x, y, z)中,向量v=ax+by+cz,v绕z轴逆时针旋转θ角后得到新的向量v’。
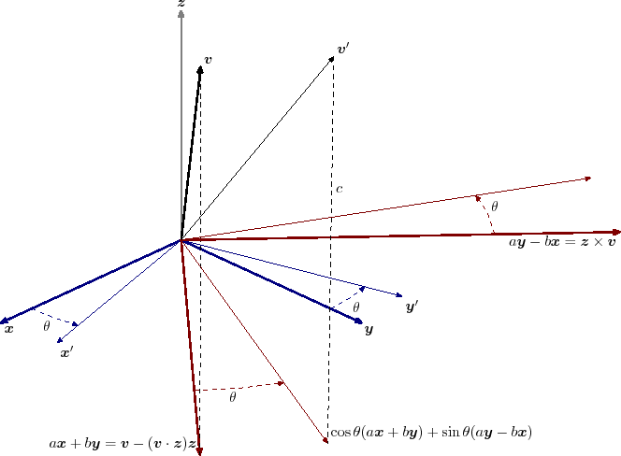
根据2维(x,y)面上的旋转公式可得:
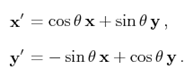
推出:
 已知:
已知:
 将上式带入v’的公式:
将上式带入v’的公式:
 将cz替换掉,可得:
将cz替换掉,可得:

将上式中的叉乘表示为反对称矩阵得:
另外:
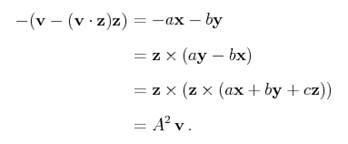
最终可以推出:

上式即为罗德里格旋转公式。
参考博客:https://www.cnblogs.com/xpvincent/archive/2013/02/15/2912836.html
参考博客里的是c#的实现代码
我是参考完之后改了一个c++的版本出来
若有兴趣交流分享技术,可关注本人公众号,里面会不定期的分享各种编程教程,和共享源码,诸如研究分享关于c/c++,python,前端,后端,opencv,halcon,opengl,机器学习深度学习之类有关于基础编程,图像处理和机器视觉开发的知识

c++ 知道旋转前后矩阵向量值 求旋转矩阵c++/c#代码 知道两个向量求他们的旋转矩阵的更多相关文章
- NX二次开发-UFUN已知两个向量方向求夹角角度UF_VEC3_angle_between
NX9+VS2012 #include <uf.h> #include <uf_ui.h> #include <uf_vec.h> #include <uf_ ...
- NX二次开发-UFUN求两个向量的叉乘UF_VEC3_cross
NX9+VS2012 #include <uf.h> #include <uf_ui.h> #include <uf_vec.h> #include <uf_ ...
- WebGL编程指南案例解析之平移和旋转的矩阵实现
手写各种矩阵: //矩阵 var vShader = ` attribute vec4 a_Position; uniform mat4 u_xformMatrix; void main(){ gl_ ...
- 帮初学者改代码——playerc之“练习:求完数问题”(下)
前文链接:帮初学者改代码——playerc之“练习:求完数问题”(上) 再来看看be_ferfect()应该如何改. be_ferfect()函数的功能是判断number是否为完数,同时把因子对写入d ...
- 帮初学者改代码——playerc之“练习:求完数问题”(上)
原文:“练习:求完数问题” 原代码: // #include <stdio.h> #include <stdlib.h> #include <math.h> #de ...
- 对Alexia(minmin)网友代码的评论及对“求比指定数大且最小的‘不重复数’问题”代码的改进
应Alexia(minmin)网友之邀,到她的博客上看了一下她的关于“求比指定数大且最小的‘不重复数’问题”的代码(百度2014研发类校园招聘笔试题解答),并在评论中粗略地发表了点意见. 由于感觉有些 ...
- HDU 4607 Park Visit 两次DFS求树直径
两次DFS求树直径方法见 这里. 这里的直径是指最长链包含的节点个数,而上一题是指最长链的路径权值之和,注意区分. K <= R: ans = K − 1; K > R: ans = ...
- 矩阵分解(rank decomposition)文章代码汇总
矩阵分解(rank decomposition)文章代码汇总 矩阵分解(rank decomposition) 本文收集了现有矩阵分解的几乎所有算法和应用,原文链接:https://sites.goo ...
- C# 求精简用一行代码完成的多项判断 重复赋值
C# 求精简用一行代码完成的多项判断 重复赋值 哈哈,说实话,个人看着这么长的三元操作也麻烦,但是我也只想到了这样三元判断句中执行方法体能够写到一行,追求的终极目的是,用一行实现这个过程,而且简单,由 ...
随机推荐
- innerHTML属性的内存和性能问题
使用innerHTML替换子节点可能会导致浏览器的内存占用问题,尤其是在IE中,问题更加明显.在删除带有时间处理程序或引用了其他js对象子树是,就有可能导致内存占用问题.假设某个元素有一个事件处理程序 ...
- 学习Vue.js
Vue.js官网 Vue.js官方教程 Vue.js教程 哔哩哔哩Vue.js教程 Vue.js百度百科
- Python操作pymysql写入数据库时的错误
错误一 InternalError: (pymysql.err.InternalError) (1366, "Incorrect string value: '\\xE6\\xAD\\xA3 ...
- 阿里云发布 Redis 5.0 缓存服务:全新 Stream 数据类型带来不一样缓存体验
4月24日,阿里云正式宣布推出全新 Redis 5.0 版本云数据库缓存服务,据悉该服务完全兼容 4.0 及早期版本,继承了其一贯的安全,稳定,高效等特点并带来了全新的 Stream 数据结构及多项优 ...
- 自定义View系列教程02--onMeasure源码详尽分析
深入探讨Android异步精髓Handler 站在源码的肩膀上全解Scroller工作机制 Android多分辨率适配框架(1)- 核心基础 Android多分辨率适配框架(2)- 原理剖析 Andr ...
- 18-2 djanjo中间件和orm多对多操作,以及ajax
一 中间件 0 怎样使用中间件 在setting配置文件里面注册你的中间件,如下: 'mymiddleware.MD1', 前面是文件名,后面是类名 然后在你的mymiddleware文件里导入: ...
- oracle函数 CONCAT(c1,c2)
[功能]连接两个字符串 [参数]c1,c2 字符型表达式 [返回]字符型 同:c1||c2 [示例] select concat('010-','88888888')||'转23' 高乾竞电话 fro ...
- 模板—树上倍增LCA
int LCA(int x,int y) { if(x==y)return x; if(dep[x]>dep[y])swap(x,y); while(dep[x]<dep[y]) ;;i+ ...
- 解决pip is configured with locations that require TLS/SSL问题
python3.7安装, 解决pip is configured with locations that require TLS/SSL问题1.安装相关依赖 yum install gcc libff ...
- 2018-2-13-win10-uwp-获得Slider拖动结束的值
title author date CreateTime categories win10 uwp 获得Slider拖动结束的值 lindexi 2018-2-13 17:23:3 +0800 201 ...