移植mavlink协议到STM32详细教程
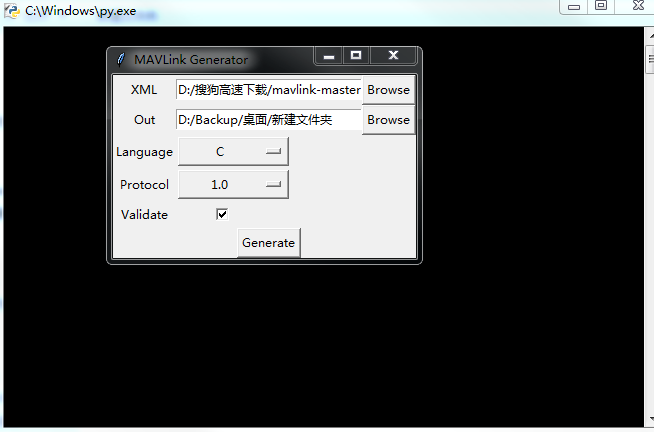
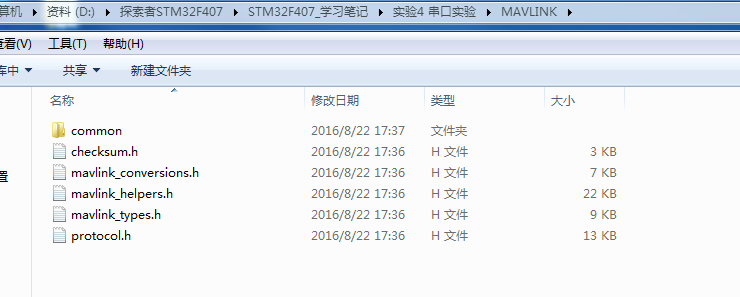
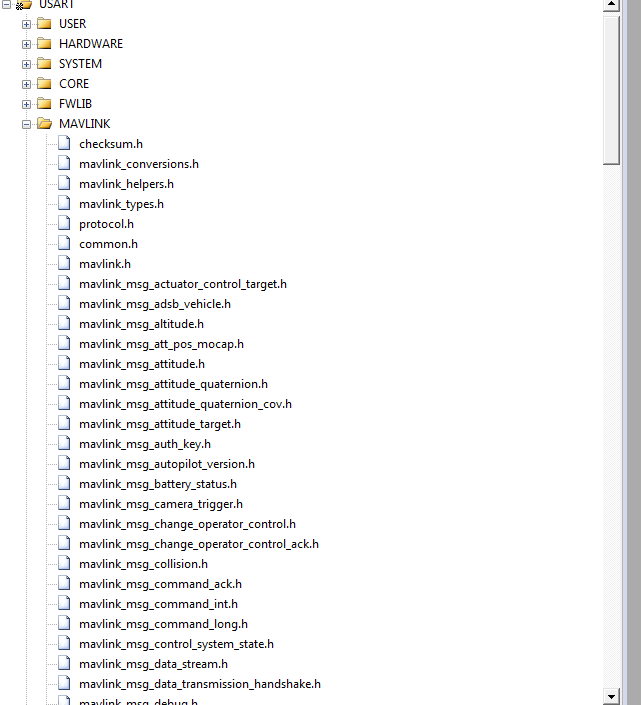
1准备材料,



#define MAVPACKED( __Declaration__ ) __pragma( pack(push,1)) __Declaration__ __pragma( pack(pop))
#define MAVPACKED( __Declaration__ ) __Declaration__


#defineinline __INLINE
MAVLINK_HELPER void mavlink_dcm_to_quaternion(constfloat dcm[3][3],float quaternion[4]){float tr = dcm[0][0]+ dcm[1][1]+ dcm[2][2];if(tr >0.0f){float s = sqrtf(tr +1.0f);quaternion[0]= s *0.5f;s =0.5f/ s;quaternion[1]=(dcm[2][1]- dcm[1][2])* s;quaternion[2]=(dcm[0][2]- dcm[2][0])* s;quaternion[3]=(dcm[1][0]- dcm[0][1])* s;}else{/* Find maximum diagonal element in dcm* store index in dcm_i */int dcm_i =0;int i;for(i =1; i <3; i++){if(dcm[i][i]> dcm[dcm_i][dcm_i]){dcm_i = i;}}int dcm_j =(dcm_i +1)%3;int dcm_k =(dcm_i +2)%3;float s = sqrtf((dcm[dcm_i][dcm_i]- dcm[dcm_j][dcm_j]-dcm[dcm_k][dcm_k])+1.0f);quaternion[dcm_i +1]= s *0.5f;s =0.5f/ s;quaternion[dcm_j +1]=(dcm[dcm_i][dcm_j]+ dcm[dcm_j][dcm_i])* s;quaternion[dcm_k +1]=(dcm[dcm_k][dcm_i]+ dcm[dcm_i][dcm_k])* s;quaternion[0]=(dcm[dcm_k][dcm_j]- dcm[dcm_j][dcm_k])* s;}}
MAVLINK_HELPER void mavlink_dcm_to_quaternion(constfloat dcm[3][3],float quaternion[4]){int dcm_j,dcm_k;float s;float tr = dcm[0][0]+ dcm[1][1]+ dcm[2][2];if(tr >0.0f){float s = sqrtf(tr +1.0f);quaternion[0]= s *0.5f;s =0.5f/ s;quaternion[1]=(dcm[2][1]- dcm[1][2])* s;quaternion[2]=(dcm[0][2]- dcm[2][0])* s;quaternion[3]=(dcm[1][0]- dcm[0][1])* s;}else{/* Find maximum diagonal element in dcm* store index in dcm_i */int dcm_i =0;int i;for(i =1; i <3; i++){if(dcm[i][i]> dcm[dcm_i][dcm_i]){dcm_i = i;}}dcm_j =(dcm_i +1)%3;dcm_k =(dcm_i +2)%3;s = sqrtf((dcm[dcm_i][dcm_i]- dcm[dcm_j][dcm_j]-dcm[dcm_k][dcm_k])+1.0f);quaternion[dcm_i +1]= s *0.5f;s =0.5f/ s;quaternion[dcm_j +1]=(dcm[dcm_i][dcm_j]+ dcm[dcm_j][dcm_i])* s;quaternion[dcm_k +1]=(dcm[dcm_k][dcm_i]+ dcm[dcm_i][dcm_k])* s;quaternion[0]=(dcm[dcm_k][dcm_j]- dcm[dcm_j][dcm_k])* s;}}
MAVLINK_HELPER uint16_t mavlink_msg_to_send_buffer(uint8_t*buffer,constmavlink_message_t*msg){memcpy(buffer,(constuint8_t*)&msg->magic, MAVLINK_NUM_HEADER_BYTES +(uint16_t)msg->len);uint8_t*ck = buffer +(MAVLINK_NUM_HEADER_BYTES +(uint16_t)msg->len);ck[0]=(uint8_t)(msg->checksum &0xFF);ck[1]=(uint8_t)(msg->checksum >>8);return MAVLINK_NUM_NON_PAYLOAD_BYTES +(uint16_t)msg->len;}
MAVLINK_HELPER uint16_t mavlink_msg_to_send_buffer(uint8_t*buffer,constmavlink_message_t*msg){uint8_t*ck;memcpy(buffer,(constuint8_t*)&msg->magic, MAVLINK_NUM_HEADER_BYTES +(uint16_t)msg->len);ck = buffer +(MAVLINK_NUM_HEADER_BYTES +(uint16_t)msg->len);ck[0]=(uint8_t)(msg->checksum &0xFF);ck[1]=(uint8_t)(msg->checksum >>8);return MAVLINK_NUM_NON_PAYLOAD_BYTES +(uint16_t)msg->len;}
#define _MAV_RETURN_char(msg, wire_offset)(constchar)_MAV_PAYLOAD(msg)[wire_offset]#define_MAV_RETURN_int8_t(msg, wire_offset)(constint8_t)_MAV_PAYLOAD(msg)[wire_offset]#define_MAV_RETURN_uint8_t(msg, wire_offset)(constuint8_t)_MAV_PAYLOAD(msg)[wire_offset]
#define _MAV_RETURN_char(msg, wire_offset)(constchar)_MAV_PAYLOAD(msg)[wire_offset]#define_MAV_RETURN_int8_t(msg, wire_offset)(int8_t)_MAV_PAYLOAD(msg)[wire_offset]#define_MAV_RETURN_uint8_t(msg, wire_offset)(uint8_t)_MAV_PAYLOAD(msg)[wire_offset]
移植mavlink协议到STM32详细教程的更多相关文章
- 移植mavlink到stm32详细教程,后面附快速移植方法
一:准备材料: mavlink源码 stm32串口程序 1.mavlink源码: a.进入mavlink官网(http://qgroundcontrol.org/mavlink/s ...
- 移植MAVLINK到STM32详细教程之三
在前面教程的基础上继续移植优化,之前的没有加缓冲区,没有接收函数功能,这里进行统一的讲解 作者:恒久力行 qq:624668529 缓冲区对于接 ...
- Xilinx zynq-7000系列FPGA移植Linux操作系统详细教程
Xilinx zynq-7000系列FPGA移植Linux操作系统详细教程 一:前言 最近手上压了一块米联客的Miz7035,一块xilinx zynq-7000系列的开发板,想着正好学习一下linu ...
- mavlink协议移植问题
mavlink协议移植问题 mavlink源代码是一个代码库,使用的时候只需要将mavlink.h头文件包含到工程项目中即可. mavlink通信协议是无状态的连接,一般采用心跳消息跟踪系统是否存在. ...
- git详细教程
Table of Contents 1 Git详细教程 1.1 Git简介 1.1.1 Git是何方神圣? 1.1.2 重要的术语 1.1.3 索引 1.2 Git安装 1.3 Git配置 1.3.1 ...
- GitHub详细教程(转载)
1 Git详细教程 1.1 Git简介 1.1.1 Git是何方神圣? 1.1.2 重要的术语 1.1.3 索引 1.2 Git安装 1.3 Git配置 1.3.1 用户信息 1.3.2 高亮显示 1 ...
- GitHub详细教程
GitHub详细教程 Table of Contents 1 Git详细教程 1.1 Git简介 1.1.1 Git是何方神圣? 1.1.2 重要的术语 1.1.3 索引 1.2 Git安装 1.3 ...
- 【原创】车载实时路况信息接收终端移植于Smart210开发板 --- 综合教程
[原创]车载实时路况信息接收终端移植于Smart210开发板 --- 综合教程 所用工具: windows电脑 Ubuntu12.04 Smart210开发板 4g以上SD卡 U盘 步骤: 1. ...
- Ymodem协议(参考STM32)
相信很多人都希望,不开盖就可以对固件进行升级吧,就像手机那些.下文中的bootload就来实现这样的功能. 前段时间有项目关于Bootload设计.所以就仔细的去了研究了一翻.以前都是用的stm32官 ...
随机推荐
- 菜鸟级的Git与GitHub使用总结(转)
菜鸟级的Git与GitHub使用总结 原创 2016年12月01日 14:58:30 1792 前言 这几天一直在折腾学习Git和GitHub的使用.几天下来,在网上查阅了大量的资料,总算有一些成果. ...
- ubuntu 13.04 安装 JDK
ubuntu 13.04 安装 JDK 具体步骤参详了如下链接: http://blog.csdn.net/yang_hui1986527/article/details/6677450 1.到 Su ...
- 阶段2-新手上路\项目-移动物体监控系统\Sprint2-摄像头子系统开发\第2节-V4L2图像编程接口深度学习
参考资料: http://www.cnblogs.com/emouse/archive/2013/03/04/2943243.htmlhttp://blog.csdn.net/eastmoon5021 ...
- ZOJ 3946 Highway Project (最短路)
题意:单源最短路,给你一些路,给你这些路的长度,给你修这些路的话费,求最短路和最小花费. 析:本质就是一个最短路,不过要维护两个值罢了,在维护花费时要维护的是该路要花多少,而不是总的路线花费. 代码如 ...
- 《JavaScript语言精粹》第二章-语法 简单笔记
注释 JavaScript提供两种注释: /* */包围的块注释及//开头的行注释. 注释应该被优先用来提高程序的可读性,注释要精确地描述代码,没有用的注释比没有注释更糟糕. /* */块注释对于被注 ...
- InnoDB recovery过程解析
本文来自网易云社区. InnoDB如果发生意外宕机了,数据会丢么?对于这个问题,稍微了解一点MySQL知识的人,都会斩钉截铁的回答:不会!为什么?他们也会毫不犹豫的说:因为有重做日志(redo log ...
- 网络应用(3):CDN与P2P的概念
我前面说了流量的概念,流量是使用网络时经常要考虑的一个因素--如何才能更快的使用流量,如何才能节省流量使用的成本,对于这样的问题,你可能要了解一下什么是cdn,什么是p2p. (1)cdn是什么 cd ...
- Lxc容器基本用法
你将学到什么 如何安装LXC 如何创建LXC容器 如何管理LXC容器 如何查询进程所属Namespace 如何给LXC容器添加网卡 如何限制LXC容器资源 环境 x64 Ubuntu 14.04.3 ...
- Spark Streaming 官网上提到的几点调优
总的来说,需要考虑以下两点: 1. 有效地运用集群资源去减少每个批次处理的时间 2. 正确的设置batch size,以使得处理速度能跟上接收速度 一. 为了减少处理时间,主要有以下几个优化点: 1 ...
- SKlearn中分类决策树的重要参数详解
学习机器学习童鞋们应该都知道决策树是一个非常好用的算法,因为它的运算速度快,准确性高,方便理解,可以处理连续或种类的字段,并且适合高维的数据而被人们喜爱,而Sklearn也是学习Python实现机器学 ...