RoIPooling
 、
、
代码:
template <typename Dtype>
void ROIPoolingLayer<Dtype>::Forward_cpu(const vector<Blob<Dtype>*>& bottom,
const vector<Blob<Dtype>*>& top) {
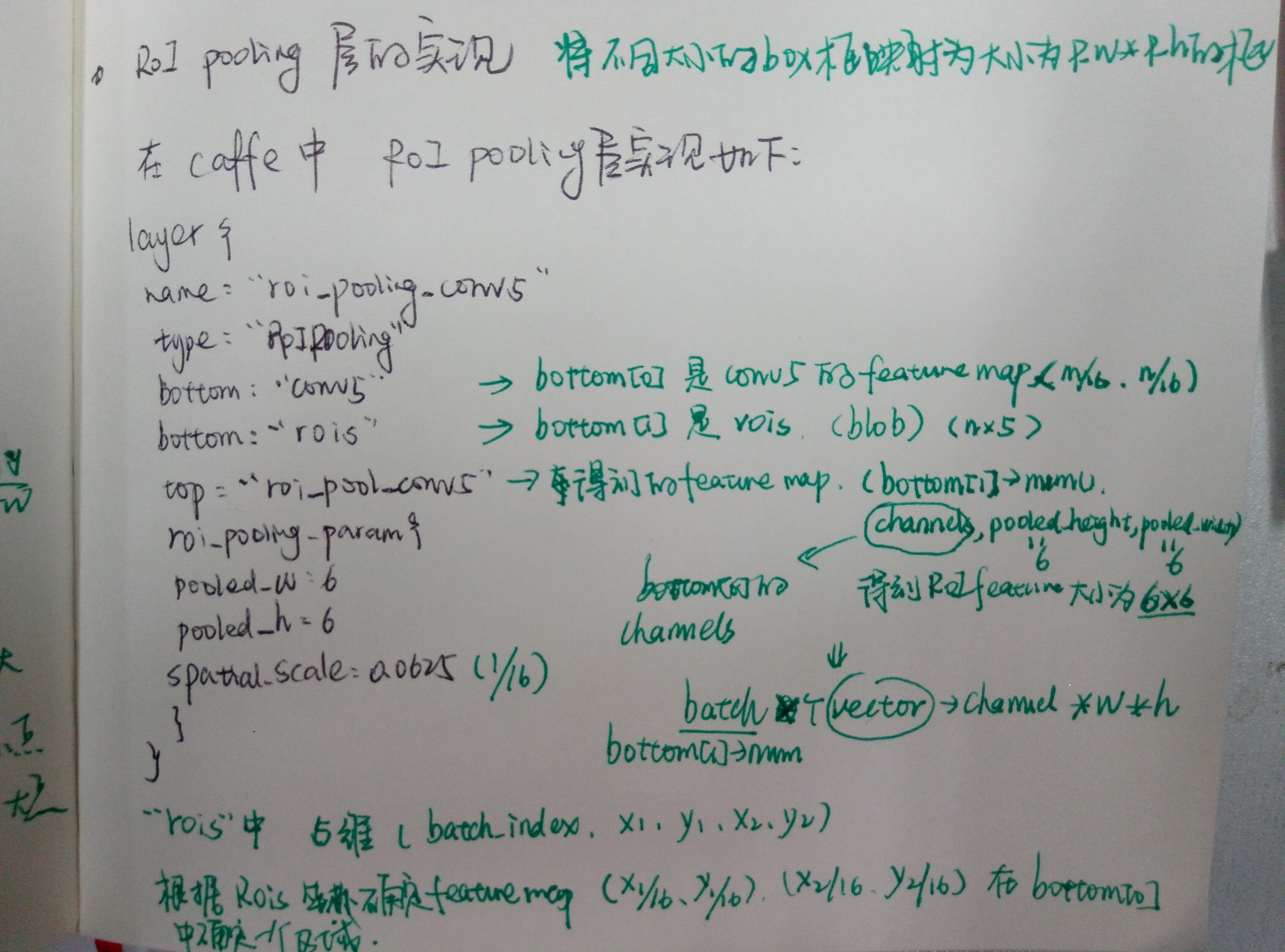
//输入有两部分组成,data和rois
const Dtype* bottom_data = bottom[0]->cpu_data();
const Dtype* bottom_rois = bottom[1]->cpu_data();
// Number of ROIs
int num_rois = bottom[1]->num();
int batch_size = bottom[0]->num();
int top_count = top[0]->count();
Dtype* top_data = top[0]->mutable_cpu_data();
caffe_set(top_count, Dtype(-FLT_MAX), top_data);
int* argmax_data = max_idx_.mutable_cpu_data();
caffe_set(top_count, -1, argmax_data); // For each ROI R = [batch_index x1 y1 x2 y2]: max pool over R
for (int n = 0; n < num_rois; ++n) {
int roi_batch_ind = bottom_rois[0];
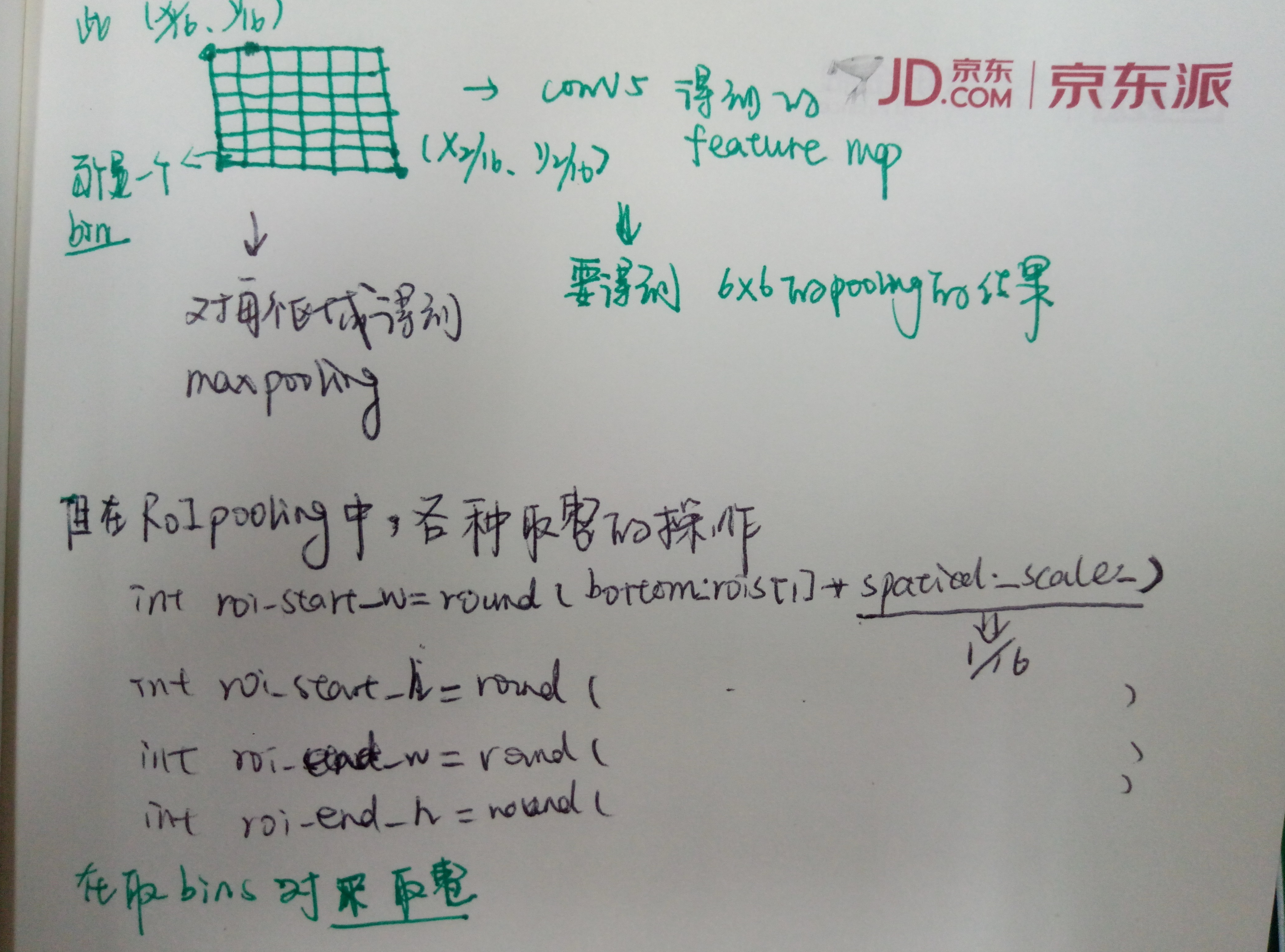
//把原图的坐标映射到feature map上面
int roi_start_w = round(bottom_rois[1] * spatial_scale_);
int roi_start_h = round(bottom_rois[2] * spatial_scale_);
int roi_end_w = round(bottom_rois[3] * spatial_scale_);
int roi_end_h = round(bottom_rois[4] * spatial_scale_);
//计算每个roi在feature map上面的大小
int roi_height = max(roi_end_h - roi_start_h + 1, 1);
int roi_width = max(roi_end_w - roi_start_w + 1, 1);
//pooling之后的feature map的一个值对应于pooling之前的feature map上的大小
//注:由于roi的大小不一致,所以每次都需要计算一次
const Dtype bin_size_h = static_cast<Dtype>(roi_height)
/ static_cast<Dtype>(pooled_height_);
const Dtype bin_size_w = static_cast<Dtype>(roi_width)
/ static_cast<Dtype>(pooled_width_);
//找到对应的roi的feature map,如果input data的batch size为1
//那么roi_batch_ind=0
const Dtype* batch_data = bottom_data + bottom[0]->offset(roi_batch_ind);
//pooling的过程是针对每一个channel的,所以需要循环遍历
for (int c = 0; c < channels_; ++c) {
//计算output的每一个值,所以需要遍历一遍output,然后求出所有值
for (int ph = 0; ph < pooled_height_; ++ph) {
for (int pw = 0; pw < pooled_width_; ++pw) {
// Compute pooling region for this output unit:
// start (included) = floor(ph * roi_height / pooled_height_)
// end (excluded) = ceil((ph + 1) * roi_height / pooled_height_)
// 计算output上的一点对应于input上面区域的大小[hstart, wstart, hend, wend]
int hstart = static_cast<int>(floor(static_cast<Dtype>(ph)
* bin_size_h));
int hend = static_cast<int>(ceil(static_cast<Dtype>(ph + 1)
* bin_size_h));
int wstart = static_cast<int>(floor(static_cast<Dtype>(pw)
* bin_size_w));
int wend = static_cast<int>(ceil(static_cast<Dtype>(pw + 1)
* bin_size_w));
//将映射后的区域平动到对应的位置[hstart, wstart, hend, wend]
hstart = min(max(hstart + roi_start_h, 0), height_);
hend = min(max(hend + roi_start_h, 0), height_);
wstart = min(max(wstart + roi_start_w, 0), width_);
wend = min(max(wend + roi_start_w, 0), width_);
//如果映射后的矩形框不符合
bool is_empty = (hend <= hstart) || (wend <= wstart);
//pool_index指的是此时计算的output的值对应于output的位置
const int pool_index = ph * pooled_width_ + pw;
//如果矩形不符合,此处output的值设为0,此处的对应于输入区域的最大值为-1
if (is_empty) {
top_data[pool_index] = 0;
argmax_data[pool_index] = -1;
}
//遍历output的值对应于input的区域块
for (int h = hstart; h < hend; ++h) {
for (int w = wstart; w < wend; ++w) {
// 对应于input上的位置
const int index = h * width_ + w;
//计算区域块的最大值,保存在output对应的位置上
//同时记录最大值的索引
if (batch_data[index] > top_data[pool_index]) {
top_data[pool_index] = batch_data[index];
argmax_data[pool_index] = index;
}
}
}
}
}
// Increment all data pointers by one channel
batch_data += bottom[0]->offset(0, 1);
top_data += top[0]->offset(0, 1);
argmax_data += max_idx_.offset(0, 1);
}
// Increment ROI data pointer
bottom_rois += bottom[1]->offset(1);
}
}
RoIPooling的更多相关文章
- RoIPooling、RoIAlign笔记
一).RoIPooling 这个可以在Faster RCNN中使用以便使生成的候选框region proposal映射产生固定大小的feature map 先贴出一张图,接着通过这图解释RoiPool ...
- RoIPooling与RoIAlign的区别
一.RoIPooling与RoIAlign 1.1.RoIPooling 通过对Faster RCNN的学习我妈了解的RolPooling可以使生成的候选框region proposal映射产生固定大 ...
- ROIAlign, ROIPooling及ROIWarp对比
RoI Pooling 实现从原图ROI区域映射到卷积区域最后pooling到固定大小的功能,然后通过池化把该区域的尺寸归一化成卷积网络输入的尺寸. ROIAlign 上面RoI Pooling从原图 ...
- python读取caffemodel文件
caffemodel是二进制的protobuf文件,利用protobuf的python接口可以读取它,解析出需要的内容 不少算法都是用预训练模型在自己数据上微调,即加载"caffemodel ...
- Faster-RCNN 训练自己的数据
在前一篇随笔中,数据制作成了VOC2007格式,可以用于Faster-RCNN的训练. 1.针对数据的修改 修改datasets\VOCdevkit2007\VOCcode\VOCinit.m,我只做 ...
- [OpenCV] Face Detection
即将进入涉及大量数学知识的阶段,先读下“别人家”的博文放松一下. 读罢该文,基本能了解面部识别领域的整体状况. 后生可畏. 结尾的Google Facenet中的2亿数据集,仿佛隐约听到:“你们都玩儿 ...
- (转) 技术揭秘:海康威视PASCAL VOC2012目标检测权威评测夺冠之道
技术揭秘:海康威视PASCAL VOC2012目标检测权威评测夺冠之道 原创 2016-09-21 钟巧勇 深度学习大讲堂 点击上方“深度学习大讲堂”可订阅哦!深度学习大讲堂是高质量原创内容平台,邀请 ...
- 大规模视觉识别挑战赛ILSVRC2015各团队结果和方法 Large Scale Visual Recognition Challenge 2015
Large Scale Visual Recognition Challenge 2015 (ILSVRC2015) Legend: Yellow background = winner in thi ...
- 海康威视研究院ImageNet2016竞赛经验分享
原文链接:https://zhuanlan.zhihu.com/p/23249000 目录 场景分类 数据增强 数据增强对最后的识别性能和泛化能力都有着非常重要的作用.我们使用下面这些数据增强方法. ...
随机推荐
- RESTful API规范
1. 域名 应该尽量将API部署在专用的域名下. https://api.example.com 如果确定API简单,不会有进一步的括在,可以考虑放在主域名之下. https://example.or ...
- .NET CORE学习笔记系列(3)——ASP.NET CORE多环境标识
在开发项目的过程当中,生产环境与调试环境的配置是不一样的.比如连接字符串. ASP .NET CORE 支持利用环境变量来动态配置 JSON 文件.ASP.NET Core 引用了一个特定的环境变量 ...
- 单元测试(qunit)
<!DOCTYPE html> <html> <head> <meta charset="utf-8"> <meta http ...
- HTML&CSS
行内元素 <a>.<span>.<br>.<i>.<em>.<strong>.<label>.<q>.& ...
- Linux操作系统上要慎用的6个命令及防范方法
Linux操作系统上要慎用的6个命令及防范方法 基于Linux平台工作的童鞋都知道Linux命令行使用起来非常高效和快捷,但有时候也很危险,尤其是在你不确定你自己在正在做什么时候(别笑,别以为自己真的 ...
- 如何用php实现分页效果
分页效果在网页中是常见的,可是怎样才能实现分页呢,今天做了两种方法来实现一下分页的效果 首先,我们需要准备在数据库里面准备一个表,并且插入数据,这些都是必需的前提工作了,不多说,如图所示(库名为jer ...
- hotspot目录结构
Hotspot的目录结构 ├─agent Serviceability Agent的客户端实现 ├─make 用来build出HotSpot的各种配置文件 ├─src HotSpot VM的源代码 │ ...
- Linux内存管理 (2)页表的映射过程
专题:Linux内存管理专题 关键词:swapper_pd_dir.ARM PGD/PTE.Linux PGD/PTE.pgd_offset_k. Linux下的页表映射分为两种,一是Linux自身的 ...
- iframe 自适应
<iframe src="http://www.fulibac.com" id="myiframe" scrolling="no" o ...
- Jmeter二次开发代码(1)
package org.apache.jmeter.functions; import java.util.Collection;import java.util.LinkedList;import ...