SLAM: 图像角点检测的Fast算法(OpenCV文档)
原文链接:http://blog.csdn.net/candycat1992/article/details/22285979
本文做了少量修改,并添加了C++代码,若有疑问或者版权问题,请拜读作者或者通知本人。
目标
- 理解FAST算法的基本原理
- 使用OpenCV的FAST函数进行角点(corners)检测
原理
learning for high-speed corner detection”(在2010年再次被修订)中被提出。下面是该算法的一个基本总结。你可以参见原论文去学习更多的细节(下面所有的图片是从原论文中提取的)。
使用FAST进行特征检测
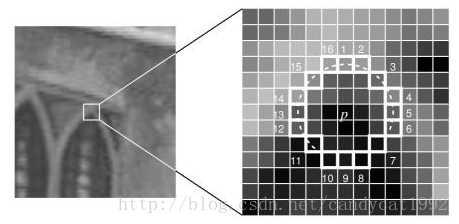
- 从图片中选取一个像素点Pi,下面我们将判断它是否是一个特征点。我们首先把它的密度(即像素值)设为I_p。
- 设定一个合适的阙值T。
- 考虑该像素点周围的16个像素。(见下图)
- 现在,如果在这个大小为16个像素的圆上有n 个连续的像素点,它们的像素值要么都比I_p+T大,要么都比I_p-T小,那么它就是一个角点。(如上图中白色虚线所示)。n 这里被设定为12。
- 我们现在应该提出一个高效的测试,来快速排除一大部分是非角点的点。该测试仅仅检查在位置1、9、5和13四个位置的像素(首先检查1和9,看它们是否亮于或暗于阙值。如果是,再检查5和13)。如果Pi是一个角点,那么上述四个像素点中至少有3个应该必须都大于I_p +T 或者小于I_p-
T(因为若是一个角点,超过四分之三个圆的部分应该满足判断条件,半圆比包含上述某三个点)。如果都不满足,那么Pi 不可能是一个角点。完整的分段测试可以被用于接受的所有候选点,通过检测圆上的所有点。这种检测有很好的性能,但是有一些缺点:
1. 当n < 12时不能拒绝许多候选点。
2. 检测出来的角点不是最优的,这是因为它的效率是依靠角点外形的排列和分布的。
3.
4. 相邻的多个特征点会被检测到。
suppression。
机器学习
- 选择一个图片集合进行学习(最好是来自于目标应用定义域)。
- 在每一张图上运行FAST算法,找到特征点。
- 对于每个特征点,存储它周围的16个像素点到一个vector中。为所有的图片做同样的事,得到它们所有特征点的vector P。
- 这16个像素中的每一个像素(假设为x),可以有下面三种状态中的一种:
- 依靠这些状态,特征向量P被划分为3个子集,P_d,P_s,P_b。
- 定义一个新的布尔变量,K_p。如果P是一个角点,那些K_p为真;否则为假。
- 使用ID3算法(决策树分类器)来查询每一个子集。
- 递归计算所有的子集直到它的嫡为0。
- 被创建的决策树就被用于其他图片的fast检测。

non-maximal suppression
suppression来解决。
- 为每一个检测到的特征点计算它的分数函数(score function),V。V是
P 和它周围16个像素点的绝对偏差的和。 - 考虑两个相邻的特征点,并比较它们的v值。
- v 值较低的点将会被剔除。
总结
OpenCV中的FAST特征检测
- cv2.FAST_FEATURE_DETECTOR_TYPE_5_8
- cv2.FAST_FEATURE_DETECTOR_TYPE_7_12
- cv2.FAST_FEATURE_DETECTOR_TYPE_9_16
import numpy as np
import cv2
from matplotlib import pyplot as plt img = cv2.imread('simple.jpg',0) # Initiate FAST object with default values
fast = cv2.FastFeatureDetector() # find and draw the keypoints
kp = fast.detect(img,None)
img2 = cv2.drawKeypoints(img, kp, color=(255,0,0)) # Print all default params
print "Threshold: ", fast.getInt('threshold')
print "nonmaxSuppression: ", fast.getBool('nonmaxSuppression')
print "neighborhood: ", fast.getInt('type')
print "Total Keypoints with nonmaxSuppression: ", len(kp) cv2.imwrite('fast_true.png',img2) # Disable nonmaxSuppression
fast.setBool('nonmaxSuppression',0)
kp = fast.detect(img,None) print "Total Keypoints without nonmaxSuppression: ", len(kp) img3 = cv2.drawKeypoints(img, kp, color=(255,0,0)) cv2.imwrite('fast_false.png',img3)
C++代码段:
int CEkfSlam::fast_corner_detect_9(
cv::Mat &im, double threshold, std::vector<CvPoint> &coords)
{
//提取快速角点//一次只提取一个角点?//且有时可能会不发现角点,可能一次有多个角点 cv::Mat image(im.rows, im.cols, 1);
if (3== im.channels() ){
cv::cvtColor (im,image,CV_BGR2GRAY);
}
else{
image =im.clone();
} //快速角点检测
std::vector<cv::KeyPoint> keypoints;
cv::FAST(image,keypoints,threshold,true); //默认开启极大值抑制!
coords.resize(keypoints.size() );
//cv::imshow("kp",image);cv::waitKey(0);
for (int i=0;i< keypoints.size();++i){
coords[i].x =keypoints[i].pt.x;
coords[i].y =keypoints[i].pt.y;
} return 1;
}
值得注意的是,下面的写法会出现内存问题:
cv::FastFeatureDetector fast(threshold, true);
fast.detect(image, allKeypoints[0]);</del>
下面是测试结果。左边是使用了nonmaxSuppression的FAST,右边则没有使用。

SLAM: 图像角点检测的Fast算法(OpenCV文档)的更多相关文章
- SLAM: 图像角点检测的Fast算法(时间阈值实验)
作为角点检测的一种快速方法,FastCornerDetect算法比Harris方法.SIft方法都要快一些,应用于实时性要求较高的场合,可以直接应用于SLAM的随机匹配过程.算法来源于2006年的Ed ...
- 【OpenCV文档】用于角点检测的Fast算法
原文地址:http://docs.opencv.org/trunk/doc/py_tutorials/py_feature2d/py_fast/py_fast.html#fast-algorithm- ...
- OpenCV-Python 用于角点检测的FAST算法 | 四十一
目标 在本章中, 我们将了解FAST算法的基础知识. 我们将使用OpenCV功能对FAST算法进行探索. 理论 我们看到了几个特征检测器,其中很多真的很棒.但是,从实时应用程序的角度来看,它们不够快. ...
- 深入学习OpenCV文档扫描及OCR识别(文档扫描,图像矫正,透视变换,OCR识别)
如果需要处理的原图及代码,请移步小编的GitHub地址 传送门:请点击我 如果点击有误:https://github.com/LeBron-Jian/ComputerVisionPractice 下面 ...
- 编译OpenCV文档
概述 使用OpenCV的过程中经常查看文档,每次都去官网查看,不过国内访问速度很慢,有一份本地的文档就好了.本文列出了在Linux(Fedora)系统上从OpenCV源码编译出documentatio ...
- NLP传统基础(1)---BM25算法---计算文档和query相关性
一.简介:TF-IDF 的改进算法 https://blog.csdn.net/weixin_41090915/article/details/79053584 bm25 是一种用来评价搜索词和文档之 ...
- RSA 算法-MSDN文档
RSA 算法 若要生成密钥对,可以从创建名为 p 和 q 的两个大的质数开始. 这两个数相乘,结果称为 n. 因为 p 和 q 都是质数,所以 n 的全部因数为 1. p. q 和 n. 如果仅考虑小 ...
- Kmeans文档聚类算法实现之python
实现文档聚类的总体思想: 将每个文档的关键词提取,形成一个关键词集合N: 将每个文档向量化,可以参看计算余弦相似度那一章: 给定K个聚类中心,使用Kmeans算法处理向量: 分析每个聚类中心的相关文档 ...
- OPENCV图像特征点检测与FAST检测算法
前面描述角点检测的时候说到,角点其实也是一种图像特征点,对于一张图像来说,特征点分为三种形式包括边缘,焦点和斑点,在OPENCV中,加上角点检测,总共提供了以下的图像特征点检测方法 FAST SURF ...
随机推荐
- unigui的session【1】
目前是1394. 明白session如何使用管理,看demo Session List和SessionTimeout unit Main; interface uses Windows, Messag ...
- 使用Eclipse 创建Spring Boot项目
一.为什么要使用 Spring Boot ? Spring Boot解决的问题 (1) Spring Boot使编码变简单 (2) Spring Boot使配置变简单 (3) Spring Boot使 ...
- Windows读取NXP MiFare Ultralight C类型NFC卡片的信息
1,读取 我们需要外接一个NFC Reader让Windows可以读取NFC卡片的内容. 因为特殊原因,我们选择了Sony rc-s380 NFC Reader.相关介绍 我们需要下载并安装NFC P ...
- java 垃圾收集
1.为什么使用垃圾收集 a.把用户从释放占用内存的重担中解救出来 b.帮助程序保持完整性 2.垃圾收集算法 检测出垃圾对象,必须回收垃圾对象所使用的堆空间并还给程序 垃圾检测:通过建立一个根对象集合并 ...
- 20180703mysql运维专题一:利用etl监控mysql日志
参考地址: https://www.elastic.co/solutions/logging https://www.elastic.co/guide/en/beats/filebeat/curren ...
- Bitcask存储模型
----<大规模分布式存储系统:原理解析与架构实战>读书笔记 近期一直在分析OceanBase的源代码,恰巧碰到了OceanBase的核心开发人员的新作<大规模分布式存储系统:原理解 ...
- 【Nginx】模块化设计
高度模块化的设计是Nginx的架构基础.全部模块都是以ngx_module_t结构体表示,该结构体内部定义了7个回调方法.它们负责模块的初始化和退出.commands成员是一个包括有ngx_comma ...
- HTML如何让IMG自动适应DIV容器大小
版权声明:本文为博主原创文章,未经博主允许不得转载.作者:沙师弟专栏 https://blog.csdn.net/u014597198/article/details/80403946HTML如何让I ...
- Android系统Recovery工作原理之使用update.zip升级过程分析(八)---解析并执行升级脚本updater-script【转】
本文转载自:http://blog.csdn.net/mu0206mu/article/details/7465551 Android系统Recovery工作原理之使用update.zip升级过程分 ...
- 使用poi读取word2007(.docx)中的复杂表格
使用poi读取word2007(.docx)中的复杂表格 最近工作需要做一个读取word(.docx)中的表格,并以html形式输出.经过上网查询,使用了poi. 对于2007及之后的word文档,需 ...