Convolutional Neural Network-week1编程题(一步步搭建CNN模型)
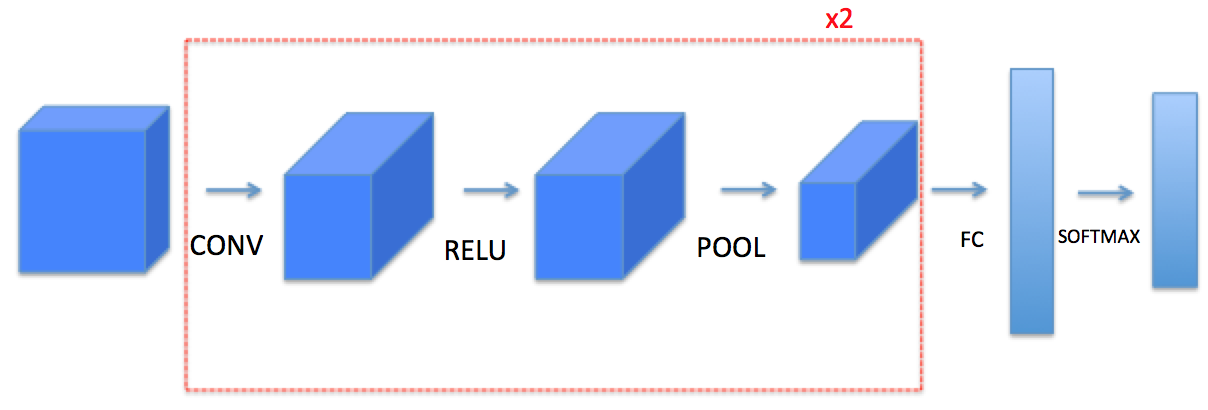
Convolutional Neural Networks: Step by Step
implement convolutional (CONV) and pooling (POOL) layers in numpy, including both forward propagation and (optionally) backward propagation.
Notation:
Superscript \([l]\) denotes an object of the \(l^{th}\) layer.
- Example: \(a^{[4]}\) is the \(4^{th}\) layer activation. \(W^{[5]}\) and \(b^{[5]}\) are the \(5^{th}\) layer parameters.
Superscript \((i)\) denotes an object from the \(i^{th}\) example.
- Example: \(x^{(i)}\) is the \(i^{th}\) training example input.
Lowerscript \(i\) denotes the \(i^{th}\) entry of a vector.
- Example: \(a^{[l]}_i\) denotes the \(i^{th}\) entry of the activations in layer \(l\), assuming this is a fully connected (FC) layer.
\(n_H\), \(n_W\) and \(n_C\) denote respectively the height, width and number of channels of a given layer. If you want to reference a specific layer \(l\), you can also write \(n_H^{[l]}\), \(n_W^{[l]}\), \(n_C^{[l]}\).
\(n_{H_{prev}}\), \(n_{W_{prev}}\) and \(n_{C_{prev}}\) denote respectively the height, width and number of channels of the previous layer. If referencing a specific layer \(l\), this could also be denoted \(n_H^{[l-1]}\), \(n_W^{[l-1]}\), \(n_C^{[l-1]}\).
1. Packages
import numpy as np
import h5py
import matplotlib.pyplot as plt
%matplotlib inline
plt.rcParams['figure.figsize'] = (5.0, 4.0) # set default size of plots
plt.rcParams['image.interpolation'] = 'nearest'
plt.rcParams['image.cmap'] = 'gray'
%load_ext autoreload
%autoreload 2
np.random.seed(1)
2. Outline of Assignment
Convolution functions, including:
Zero Padding
Convolve window
Convolution forward
Convolution backward (optional)
Pooling functions, including:
Pooling forward
Create mask
Distribute value
Pooling backward (optional)
Note: 每一步前向传播,都有对应的 反向传播,因此,你需要把每一步前向传播的parameters,存储到 cache中,用于反向传播.
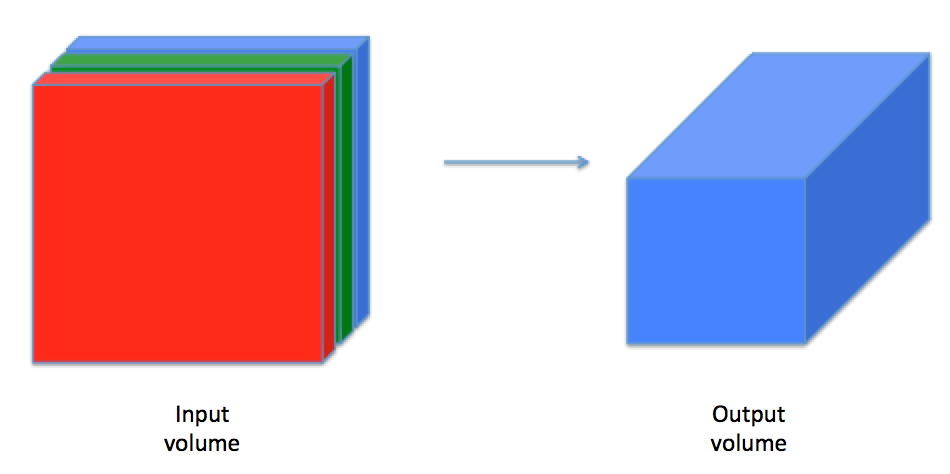
3. Convolutional Neural Networks
一个卷积层(convolutional layer)将一个输入量转换成不同大小的输出量,如图:
3.1 Zero-Padding
Zero-padding adds zeros around the border of an image:
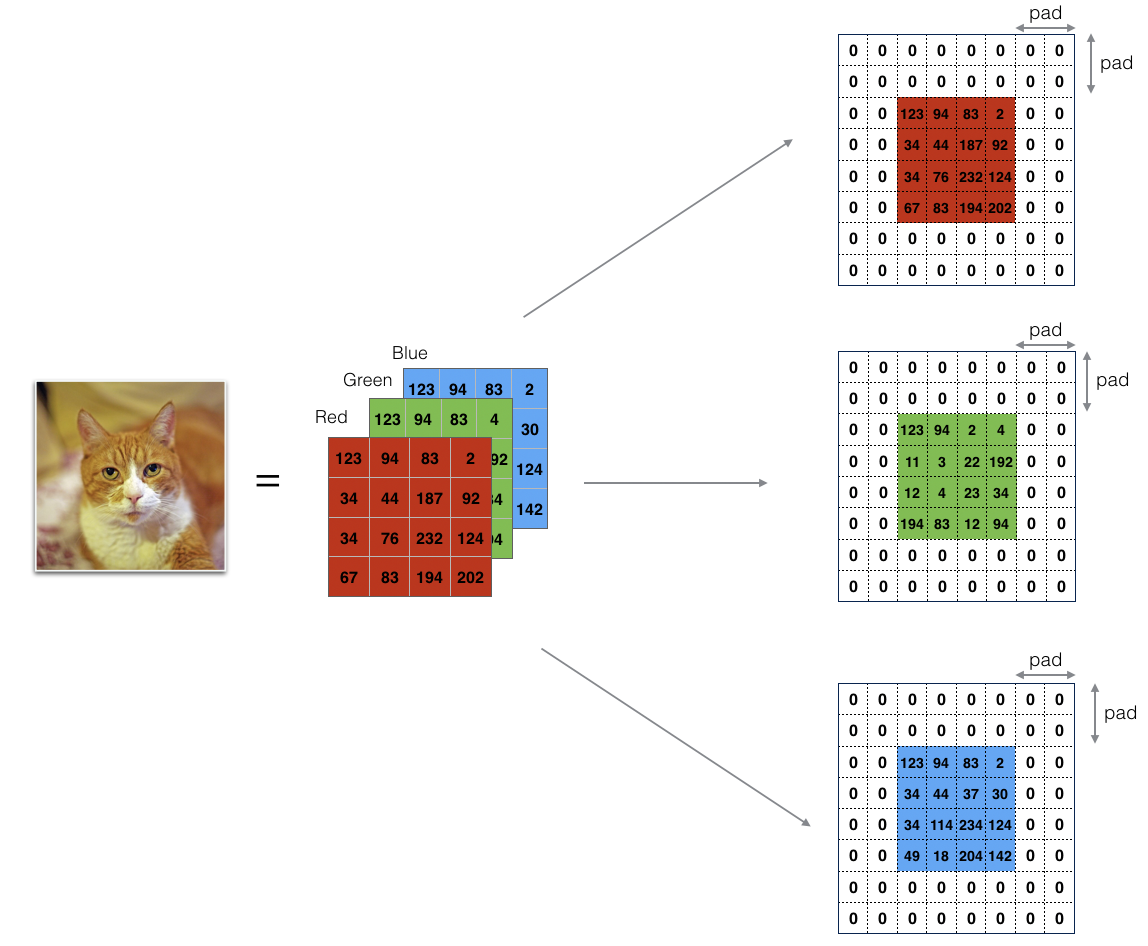
Figure 1 : Zero-Padding:Image (3 channels, RGB) with a padding of 2.
Zero-Padding的两个好处:
允许你使用 CONV layer 而不必要减小 the height and width of the volumes.(尤其是搭建深层网络时)(Same convolutions)
帮助我们保持图片边缘重要的信息. 没有Padding,很少有值,在下一层能够作为图片的边缘被像素值影响
Exercise:实现函数,用0填充一批示例X的所有图像. Note if you want to pad the array "a" of shape \((5,5,5,5,5)\) with pad = 1 for the 2nd dimension, pad = 3 for the 4th dimension and pad = 0 for the rest, you would do:
a = np.pad(a, ((0,0), (1,1), (0,0), (3,3), (0,0)), 'constant', constant_values = (..,..))
实现:
# GRADED FUNCTION: zero_pad
def zero_pad(X, pad):
"""
Pad with zeros all images of the dataset X. The padding is applied to the height and width of an image,
as illustrated in Figure 1.
Argument:
X -- python numpy array of shape (m, n_H, n_W, n_C) representing a batch of m images
pad -- integer, amount of padding around each image on vertical and horizontal dimensions
Returns:
X_pad -- padded image of shape (m, n_H + 2*pad, n_W + 2*pad, n_C)
"""
### START CODE HERE ### (≈ 1 line)
# X_pad: (m, n_H + 2*pad, n_W + 2*pad, n_C)
X_pad = np.pad(X, ((0, 0), (pad, pad), (pad, pad), (0, 0)), 'constant', constant_values=0)
### END CODE HERE ###
return X_pad
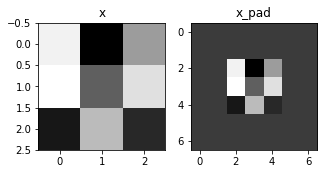
测试:
np.random.seed(1)
x = np.random.randn(4, 3, 3, 2)
x_pad = zero_pad(x, 2)
print ("x.shape =", x.shape)
print ("x_pad.shape =", x_pad.shape)
print ("x[1,1] =", x[1,1])
print ("x_pad[1,1] =", x_pad[1,1])
fig, axarr = plt.subplots(1, 2)
axarr[0].set_title('x')
axarr[0].imshow(x[0,:,:,0])
axarr[1].set_title('x_pad')
axarr[1].imshow(x_pad[0,:,:,0])
输出:
x.shape = (4, 3, 3, 2)
x_pad.shape = (4, 7, 7, 2)
x[1,1] = [[ 0.90085595 -0.68372786]
[-0.12289023 -0.93576943]
[-0.26788808 0.53035547]]
x_pad[1,1] = [[0. 0.]
[0. 0.]
[0. 0.]
[0. 0.]
[0. 0.]
[0. 0.]
[0. 0.]]
3.2 Single step of convolution
在这一部分中,实现一个卷积的步骤,在该步骤中,将过滤器应用到输入的单个位置中。这将构建卷积单元:
需要一个输入volume
将滤波器应用到输入的每个位置
输出一个不同大小的volume
Figure 2 : Convolution operation 2x2的滤波器(filter) 和 步长(stride)为1 (stride = amount you move the window each time you slide)
计算机图像应用中,左边矩阵中的每个值对应于单个像素值,我们通过3x3滤波器与图像卷积,将其值元素与原始矩阵相乘,然后将它们求和并添加偏差。将实现一个卷积步骤,对应于将滤波器应用于其中一个位置以获得单个实值输出。
稍后将将此函数应用于输入的多个位置,以实现完全卷积操作。
Exercise:实现 conv_single_step().
# GRADED FUNCTION: conv_single_step
def conv_single_step(a_slice_prev, W, b):
"""
Apply one filter defined by parameters W on a single slice (a_slice_prev) of the output activation
of the previous layer.
Arguments:
a_slice_prev -- slice of input data of shape (f, f, n_C_prev)
W -- Weight parameters contained in a window - matrix of shape (f, f, n_C_prev)
b -- Bias parameters contained in a window - matrix of shape (1, 1, 1)
Returns:
Z -- a scalar value, result of convolving the sliding window (W, b) on a slice x of the input data
"""
### START CODE HERE ### (≈ 2 lines of code)
# Element-wise product between a_slice and W. Do not add the bias yet.
s = np.multiply(a_slice_prev, W)
# Sum over all entries of the volume s.
Z = np.sum(s)
# Add bias b to Z. Cast b to a float() so that Z results in a scalar value.
Z = Z + float(b)
### END CODE HERE ###
return Z
测试:
np.random.seed(1)
a_slice_prev = np.random.randn(4, 4, 3)
W = np.random.randn(4, 4, 3)
b = np.random.randn(1, 1, 1)
Z = conv_single_step(a_slice_prev, W, b)
print("Z =", Z)
输出:
Z = -6.999089450680221
3.3 Convolutional Neural Networks - Forward pass
在前向传播中,你需要很多filters,并在输入上卷积,每次卷积,给你一个2D的矩阵输出,你将stack这些输出,组成一个3D volume:
Exercise: 函数实现 在 input activation A_prev 上卷积filter W.
A_prev作为输(上一层
m inputs激活的输出). 由W表示F filters/weights,b表示bias vector其中,每个filter都有自己的bias. 你可以访问包含 stride 和 padding的超参数字典
Hint:
在matrix "a_prev"(shape(5,5,3))的左上角,选择一个2x2的slice,你需要:
a_slice_prev = a_prev[0:2,0:2,:]- 你将使用
start/endindexes 定义a_slice_prev
- 你将使用
要定义 a_slice,你需要首先定义他的corners:
vert_start,vert_end,horiz_startandhoriz_end,下图展示每个Corner如何用 h,w,f,s 定义:
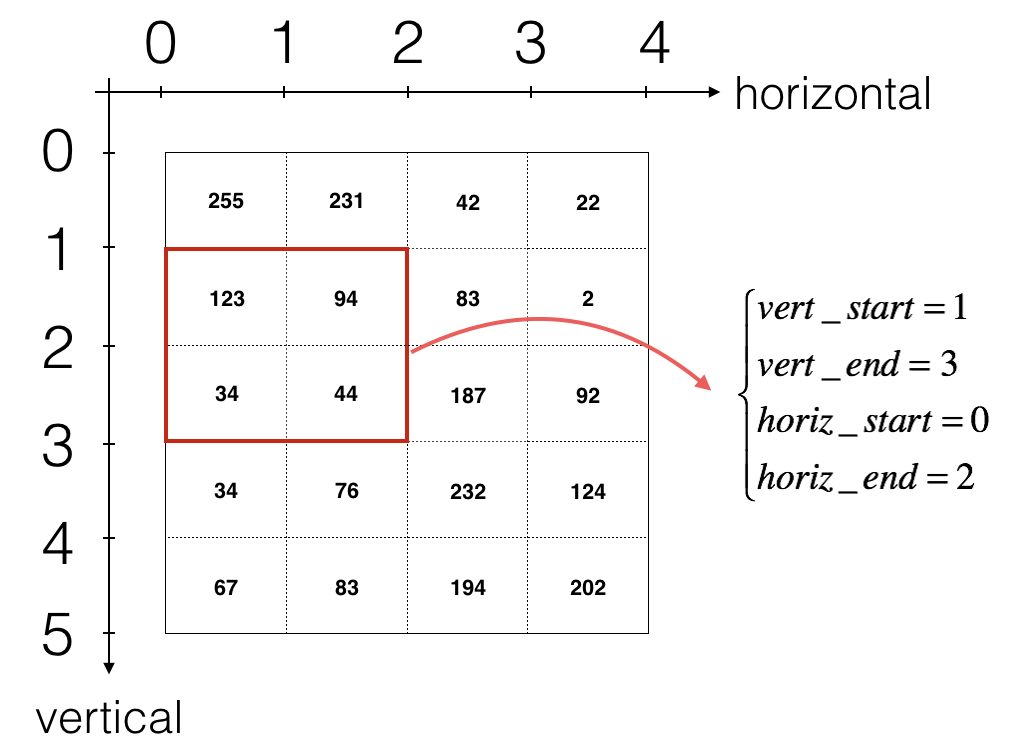
Figure 3 : Definition of a slice using vertical and horizontal start/end (with a 2x2 filter) (This figure shows only a single channel)
Reminder:
卷积后的shape与input shape 有关的公式:
\]
\]
\]
使用for-loop实现:
# GRADED FUNCTION: conv_forward
def conv_forward(A_prev, W, b, hparameters):
"""
Implements the forward propagation for a convolution function
Arguments:
A_prev -- output activations of the previous layer, numpy array of shape (m, n_H_prev, n_W_prev, n_C_prev)
W -- Weights, numpy array of shape (f, f, n_C_prev, n_C)
b -- Biases, numpy array of shape (1, 1, 1, n_C)
hparameters -- python dictionary containing "stride" and "pad"
Returns:
Z -- conv output, numpy array of shape (m, n_H, n_W, n_C)
cache -- cache of values needed for the conv_backward() function
"""
### START CODE HERE ###
# Retrieve dimensions from A_prev's shape (≈1 line)
(m, n_H_prev, n_W_prev, n_C_prev) = A_prev.shape
# Retrieve dimensions from W's shape (≈1 line)
(f, f, n_C_prev, n_C) = W.shape # n_C: n_C个filter
# Retrieve information from "hparameters" (≈2 lines)
stride = hparameters['stride']
pad = hparameters['pad']
# Compute the dimensions of the CONV output volume using the formula given above. Hint: use int() to floor. (≈2 lines)
n_H = int((n_H_prev - f + 2 * pad) / stride) + 1
n_W = int((n_W_prev - f + 2 * pad) / stride) + 1
# Initialize the output volume Z with zeros. (≈1 line)
Z = np.zeros((m, n_H, n_W, n_C)) # n_C: n_C个filter
# Create A_prev_pad by padding A_prev
A_prev_pad = zero_pad(A_prev, pad)
for i in range(m): # loop over the batch of training examples
a_prev_pad = A_prev_pad[i] # Select ith training example's padded activation
for h in range(n_H): # loop over vertical axis of the output volume
for w in range(n_W): # loop over horizontal axis of the output volume
for c in range(n_C): # loop over channels (= #filters) of the output volume
# Find the corners of the current "slice" (≈4 lines)
vert_start = h * stride
vert_end = vert_start + f
horiz_start = w * stride
horiz_end = horiz_start + f
# Use the corners to define the (3D) slice of a_prev_pad (See Hint above the cell). (≈1 line)
a_slice_prev = a_prev_pad[vert_start:vert_end, horiz_start:horiz_end, :]
# Convolve the (3D) slice with the correct filter W and bias b, to get back one output neuron. (≈1 line)
Z[i, h, w, c] = conv_single_step(a_slice_prev, W[...,c], b[...,c]) # 第c个filter的全部W,b
### END CODE HERE ###
# Making sure your output shape is correct
assert(Z.shape == (m, n_H, n_W, n_C))
# Save information in "cache" for the backprop
cache = (A_prev, W, b, hparameters)
return Z, cache
输出:
np.random.seed(1)
A_prev = np.random.randn(10,4,4,3)
W = np.random.randn(2,2,3,8)
b = np.random.randn(1,1,1,8)
hparameters = {"pad" : 2,
"stride": 2}
Z, cache_conv = conv_forward(A_prev, W, b, hparameters)
print("Z's mean =", np.mean(Z))
print("Z[3,2,1] =", Z[3,2,1])
print("cache_conv[0][1][2][3] =", cache_conv[0][1][2][3])
Z's mean = 0.048995203528855794
Z[3,2,1] = [-0.61490741 -6.7439236 -2.55153897 1.75698377 3.56208902 0.53036437
5.18531798 8.75898442]
cache_conv[0][1][2][3] = [-0.20075807 0.18656139 0.41005165]
Finally, CONV layer should also contain an activation, in which case we would add the following line of code:
# Convolve the window to get back one output neuron
Z[i, h, w, c] = ...
# Apply activation
A[i, h, w, c] = activation(Z[i, h, w, c])
You don't need to do it here.
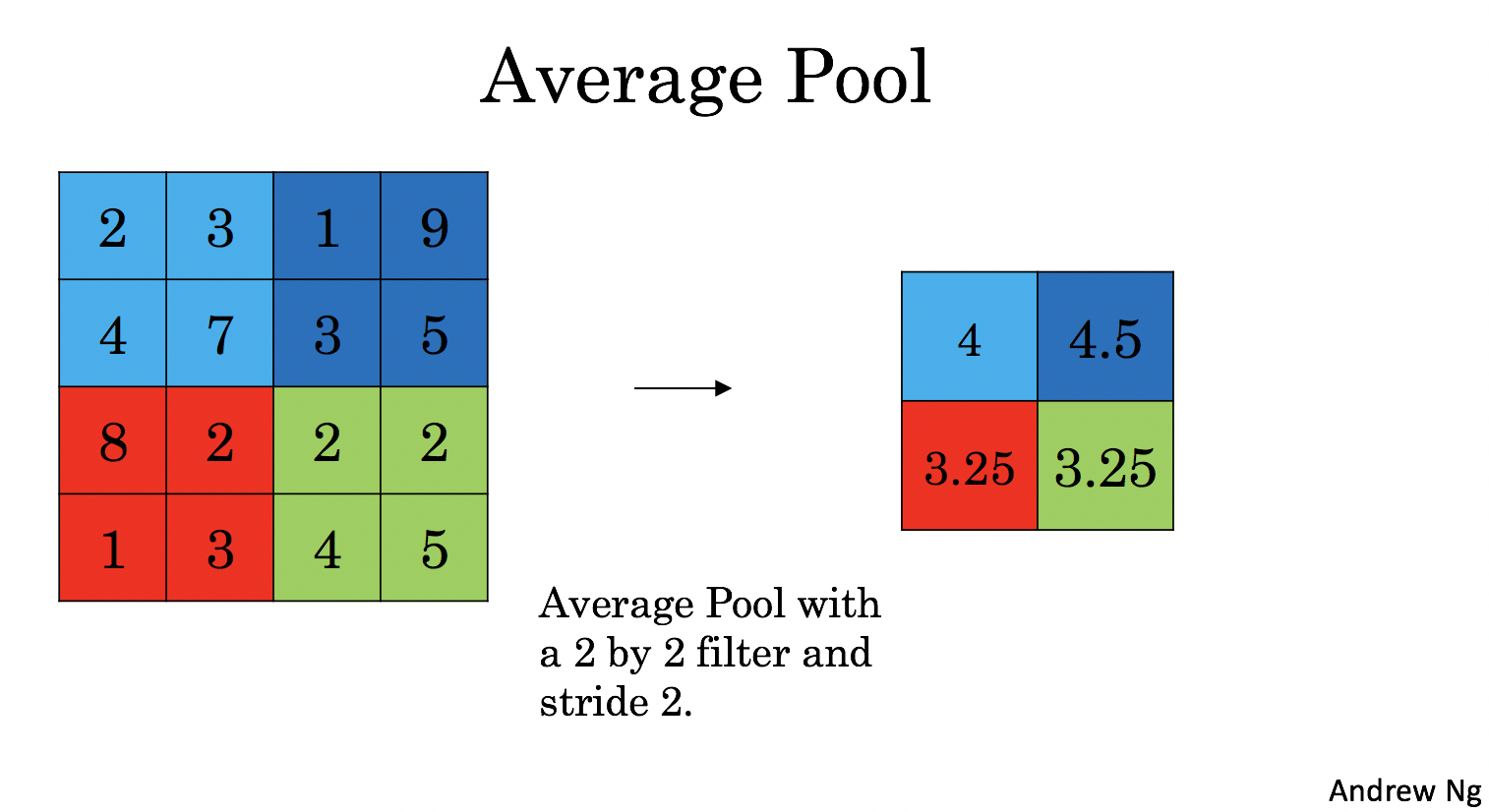
4. Pooling layer
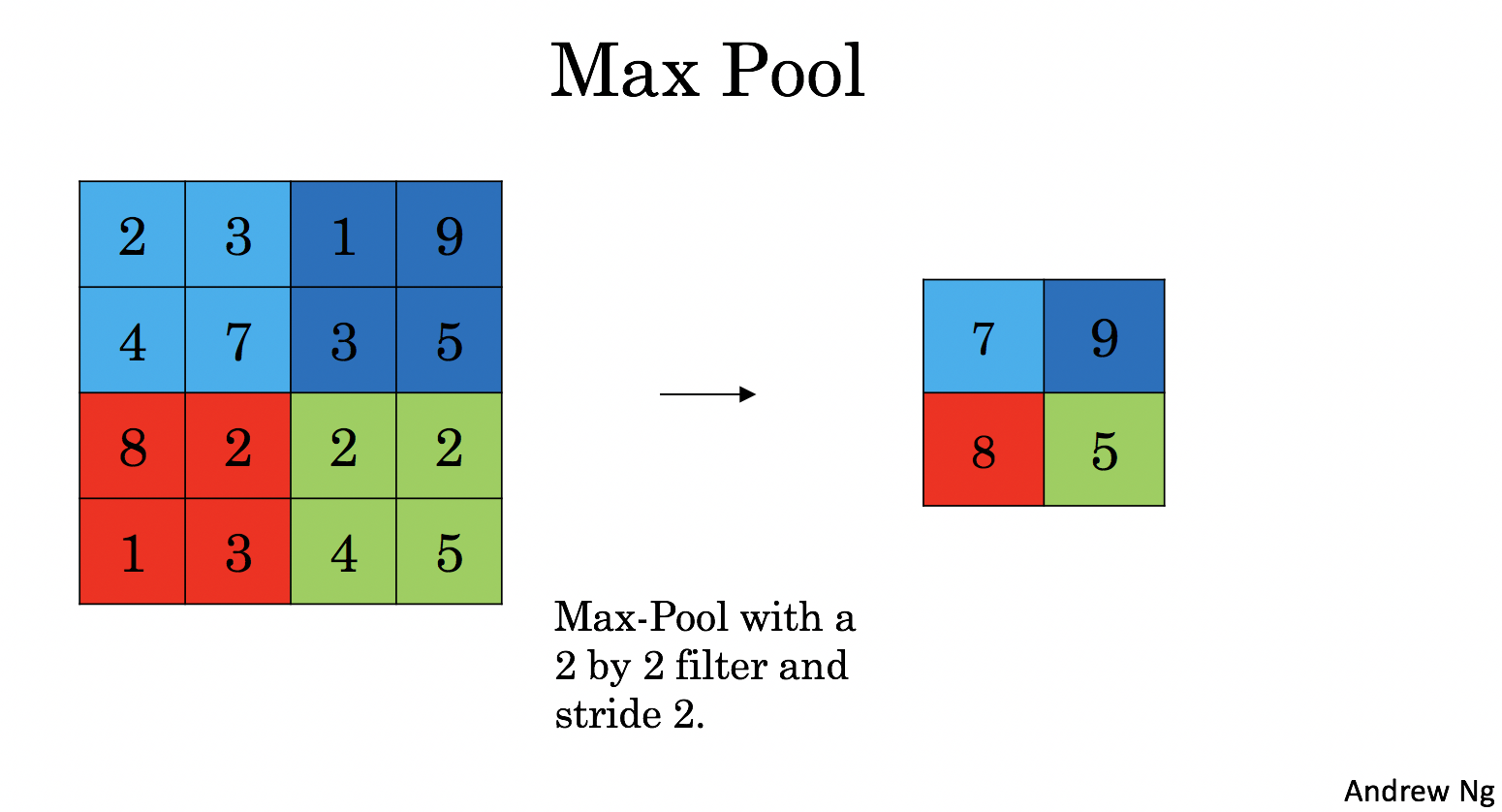
池化层(Pooling layer)减小了输入的height和width,有助于减少计算,并且有助于特征检测在输入位置的不变,两种Pooling Layers:
Max-pooling layer: slides an (\(f, f\)) window over the input and stores the max value of the window in the output.
Average-pooling layer: slides an (\(f, f\)) window over the input and stores the average value of the window in the output.
|
|
池化层(Pooling layers)没有反向传播训练参数,他们有 超参数:window size \(f\). 它指定计算fxf窗口max or average的 height和width.
4.1 - Forward Pooling
implement MAX-POOL and AVG-POOL, in the same function.
Exercise: Implement the forward pass of the pooling layer. Follow the hints in the comments below.
Reminder:
As there's no padding, the formulas binding the output shape of the pooling to the input shape is:
\]
\]
\]
# GRADED FUNCTION: pool_forward
def pool_forward(A_prev, hparameters, mode = "max"):
"""
Implements the forward pass of the pooling layer
Arguments:
A_prev -- Input data, numpy array of shape (m, n_H_prev, n_W_prev, n_C_prev)
hparameters -- python dictionary containing "f" and "stride"
mode -- the pooling mode you would like to use, defined as a string ("max" or "average")
Returns:
A -- output of the pool layer, a numpy array of shape (m, n_H, n_W, n_C)
cache -- cache used in the backward pass of the pooling layer, contains the input and hparameters
"""
# Retrieve dimensions from the input shape
(m, n_H_prev, n_W_prev, n_C_prev) = A_prev.shape
# Retrieve hyperparameters from "hparameters"
f = hparameters['f']
stride = hparameters['stride']
# Define the dimensions of the output
n_H = int((n_H_prev - f) / stride + 1)
n_W = int((n_W_prev - f) / stride + 1)
n_C = n_C_prev
# Initialize output matrix A
A = np.zeros((m, n_H, n_W, n_C))
### START CODE HERE ###
for i in range(m): # loop over the training examples
for h in range(n_H): # loop on the vertical axis of the output volume
for w in range(n_W): # loop on the horizontal axis of the output volume
for c in range (n_C): # loop over the channels of the output volume
# Find the corners of the current "slice" (≈4 lines)
vert_start = h * stride
vert_end = vert_start + f
horiz_start = w * stride
horiz_end = horiz_start + f
# Use the corners to define the current slice on the ith training example of A_prev, channel c. (≈1 line)
a_prev_slice = A_prev[i, vert_start:vert_end, horiz_start:horiz_end, c]
# Compute the pooling operation on the slice. Use an if statment to differentiate the modes. Use np.max/np.mean.
if mode == "max":
A[i, h, w, c] = np.max(a_prev_slice)
elif mode == "average":
A[i, h, w, c] = np.mean(a_prev_slice)
### END CODE HERE ###
# Store the input and hparameters in "cache" for pool_backward()
cache = (A_prev, hparameters)
# Making sure your output shape is correct
assert(A.shape == (m, n_H, n_W, n_C))
return A, cache
测试:
np.random.seed(1)
A_prev = np.random.randn(2, 4, 4, 3)
hparameters = {"stride" : 2, "f": 3}
A, cache = pool_forward(A_prev, hparameters)
print("mode = max")
print("A =", A)
print()
A, cache = pool_forward(A_prev, hparameters, mode = "average")
print("mode = average")
print("A =", A)
输出:
mode = max
A = [[[[1.74481176 0.86540763 1.13376944]]]
[[[1.13162939 1.51981682 2.18557541]]]]
mode = average
A = [[[[ 0.02105773 -0.20328806 -0.40389855]]]
[[[-0.22154621 0.51716526 0.48155844]]]]
5. Backpropagation in convolutional neural networks
5.1 Convolutional layer backward pass
5.11 Computing dA
\]
- \(W_c\)是过滤器,\(dZ_{hw}\)是卷积层第h行第w列的使用点乘计算后的输出Z的梯度。
da_prev_pad[vert_start:vert_end, horiz_start:horiz_end, :] += W[:,:,:,c] * dZ[i, h, w, c]
5.1.2 Computing dW
This is the formula for computing \(dW_c\) (\(dW_c\) is the derivative of one filter) with respect to the loss:
\]
\(dW_c\)是一个过滤器的梯度,aslice是\(Z_{ij}\)的激活值
dW[:,:,:,c] += a_slice * dZ[i, h, w, c]
5.1.3 - Computing db:
This is the formula for computing \(db\) with respect to the cost for a certain filter \(W_c\):
\]
db[:,:,:,c] += dZ[i, h, w, c]
Exercise: Implement the conv_backward function below. You should sum over all the training examples, filters, heights, and widths. You should then compute the derivatives using formulas 1, 2 and 3 above.
def conv_backward(dZ, cache):
"""
Implement the backward propagation for a convolution function
Arguments:
dZ -- gradient of the cost with respect to the output of the conv layer (Z), numpy array of shape (m, n_H, n_W, n_C)
cache -- cache of values needed for the conv_backward(), output of conv_forward()
Returns:
dA_prev -- gradient of the cost with respect to the input of the conv layer (A_prev),
numpy array of shape (m, n_H_prev, n_W_prev, n_C_prev)
dW -- gradient of the cost with respect to the weights of the conv layer (W)
numpy array of shape (f, f, n_C_prev, n_C)
db -- gradient of the cost with respect to the biases of the conv layer (b)
numpy array of shape (1, 1, 1, n_C)
"""
### START CODE HERE ###
# Retrieve information from "cache"
(A_prev, W, b, hparameters) = cache
# Retrieve dimensions from A_prev's shape
(m, n_H_prev, n_W_prev, n_C_prev) = A_prev.shape
# Retrieve dimensions from W's shape
(f, f, n_C_prev, n_C) = W.shape
# Retrieve information from "hparameters"
stride = hparameters["stride"]
pad = hparameters["pad"]
# Retrieve dimensions from dZ's shape
(m, n_H, n_W, n_C) = dZ.shape
# Initialize dA_prev, dW, db with the correct shapes
dA_prev = np.zeros((m, n_H_prev, n_W_prev, n_C_prev))
dW = np.zeros((f, f, n_C_prev, n_C))
db = np.zeros((1, 1, 1, n_C))
# Pad A_prev and dA_prev
A_prev_pad = zero_pad(A_prev, pad)
dA_prev_pad = zero_pad(dA_prev, pad)
for i in range(m): # loop over the training examples
# select ith training example from A_prev_pad and dA_prev_pad
a_prev_pad = A_prev_pad[i]
da_prev_pad = dA_prev_pad[i]
for h in range(n_H): # loop over vertical axis of the output volume
for w in range(n_W): # loop over horizontal axis of the output volume
for c in range(n_C): # loop over the channels of the output volume
# Find the corners of the current "slice"
vert_start = h * stride
vert_end = vert_start + f
horiz_start = w * stride
horiz_end = horiz_start + f
# Use the corners to define the slice from a_prev_pad
a_slice = a_prev_pad[vert_start:vert_end, horiz_start:horiz_end, :]
# a_slice = A_prev_pad[i, vert_start:vert_end, horiz_start:horiz_end, :]
# Update gradients for the window and the filter's parameters using the code formulas given above
da_prev_pad[vert_start:vert_end, horiz_start:horiz_end, :] += W[:,:,:,c] * dZ[i, h, w, c]
# dA_prev_pad[i, vert_start:vert_end, horiz_start:horiz_end, :] += W[:,:,:,c] * dZ[i, h, w, c]
dW[:,:,:,c] += a_slice * dZ[i, h, w, c]
db[:,:,:,c] += dZ[i, h, w, c]
# Set the ith training example's dA_prev to the unpaded da_prev_pad (Hint: use X[pad:-pad, pad:-pad, :])
dA_prev[i, :, :, :] = da_prev_pad[pad:-pad, pad:-pad, :]
# dA_prev[i, :, :, :] = dA_prev_pad[i, pad:-pad, pad:-pad, :]
### END CODE HERE ###
# Making sure your output shape is correct
assert(dA_prev.shape == (m, n_H_prev, n_W_prev, n_C_prev))
return dA_prev, dW, db
测试:
np.random.seed(1)
dA, dW, db = conv_backward(Z, cache_conv)
print("dA_mean =", np.mean(dA))
print("dW_mean =", np.mean(dW))
print("db_mean =", np.mean(db))
dA_mean = 1.4524377775388075
dW_mean = 1.7269914583139097
db_mean = 7.839232564616838
5.2 Pooling layer - backward pass
5.2.1 Max pooling - backward pass
创建掩码矩阵(保存最大值位置)
1 && 3 \\
4 && 2
\end{bmatrix} \quad \rightarrow \quad M =\begin{bmatrix}
0 && 0 \\
1 && 0
\end{bmatrix}\tag{4}\]
ps: 4是最大值,则mask中相应位置为1; 其他值不是最大值,则为0
Exercise: Implement create_mask_from_window(). This function will be helpful for pooling backward.
Hints:
- np.max() may be helpful. It computes the maximum of an array.
- If you have a matrix X and a scalar x:
A = (X == x)will return a matrix A of the same size as X such that:
A[i,j] = True if X[i,j] = x
A[i,j] = False if X[i,j] != x
- Here, you don't need to consider cases where there are several maxima in a matrix.
def create_mask_from_window(x):
"""
Creates a mask from an input matrix x, to identify the max entry of x.
Arguments:
x -- Array of shape (f, f)
Returns:
mask -- Array of the same shape as window, contains a True at the position corresponding to the max entry of x.
"""
### START CODE HERE ### (≈1 line)
mask = (x == np.max(x))
### END CODE HERE ###
return mask
测试:
np.random.seed(1)
x = np.random.randn(2,3)
mask = create_mask_from_window(x)
print('x = ', x)
print("mask = ", mask)
x = [[ 1.62434536 -0.61175641 -0.52817175]
[-1.07296862 0.86540763 -2.3015387 ]]
mask = [[ True False False]
[False False False]]
Why do we keep track of the position of the max?
It's because this is the input value that ultimately influenced the output, and therefore the cost.
Backprop is computing gradients with respect to the cost, so anything that influences the ultimate cost should have a non-zero gradient.
So, backprop will "propagate" the gradient back to this particular input value that had influenced the cost.
5.2.2 Average pooling - backward pass
均值池化层的反向传播:
1/4 && 1/4 \\
1/4 && 1/4
\end{bmatrix}\tag{5}\]
This implies that each position in the \(dZ\) matrix contributes equally to output because in the forward pass, we took an average.
Exercise: Implement the function below to equally distribute a value dz through a matrix of dimension shape. Hint
def distribute_value(dz, shape):
"""
Distributes the input value in the matrix of dimension shape
Arguments:
dz -- input scalar
shape -- the shape (n_H, n_W) of the output matrix for which we want to distribute the value of dz
Returns:
a -- Array of size (n_H, n_W) for which we distributed the value of dz
"""
### START CODE HERE ###
# Retrieve dimensions from shape (≈1 line)
(n_H, n_W) = shape
# Compute the value to distribute on the matrix (≈1 line)
average = dz / (n_H * n_W)
# Create a matrix where every entry is the "average" value (≈1 line)
a = np.ones(shape) * average
### END CODE HERE ###
return a
测试:
a = distribute_value(2, (2,2))
print('distributed value =', a)
distributed value = [[0.5 0.5]
[0.5 0.5]]
5.2.3 Putting it together: Pooling backward
compute backward propagation on a pooling layer.
Exercise: Implement the pool_backward function in both modes ("max" and "average").
You will once again use 4 for-loops (iterating over training examples, height, width, and channels).
You should use an
if/elifstatement to see if the mode is equal to'max'or'average'.If it is equal to 'average' you should use the
distribute_value()function you implemented above to create a matrix of the same shape asa_slice.Otherwise, the mode is equal to '
max', and you will create a mask withcreate_mask_from_window()and multiply it by the corresponding value of dZ.
def pool_backward(dA, cache, mode = "max"):
"""
Implements the backward pass of the pooling layer
Arguments:
dA -- gradient of cost with respect to the output of the pooling layer, same shape as A
cache -- cache output from the forward pass of the pooling layer, contains the layer's input and hparameters
mode -- the pooling mode you would like to use, defined as a string ("max" or "average")
Returns:
dA_prev -- gradient of cost with respect to the input of the pooling layer, same shape as A_prev
"""
### START CODE HERE ###
# Retrieve information from cache (≈1 line)
(A_prev, hparameters) = cache
# Retrieve hyperparameters from "hparameters" (≈2 lines)
stride = hparameters['stride']
f = hparameters['f']
# Retrieve dimensions from A_prev's shape and dA's shape (≈2 lines)
m, n_H_prev, n_W_prev, n_C_prev = A_prev.shape
m, n_H, n_W, n_C = dA.shape
# Initialize dA_prev with zeros (≈1 line)
dA_prev = np.zeros(A_prev.shape)
for i in range(m): # loop over the training examples
# select training example from A_prev (≈1 line)
a_prev = A_prev[i]
for h in range(n_H): # loop on the vertical axis
for w in range(n_W): # loop on the horizontal axis
for c in range(n_C): # loop over the channels (depth)
# Find the corners of the current "slice" (≈4 lines)
vert_start = h * stride
vert_end = vert_start + f
horiz_start = w * stride
horiz_end = horiz_start + f
# Compute the backward propagation in both modes.
if mode == "max":
# Use the corners and "c" to define the current slice from a_prev (≈1 line)
a_prev_slice = a_prev[vert_start:vert_end, horiz_start:horiz_end, c]
# a_prev_slice = A_prev[i, vert_start:vert_end, horiz_start:horiz_end, c]
# Create the mask from a_prev_slice (≈1 line)
mask = create_mask_from_window(a_prev_slice)
# Set dA_prev to be dA_prev + (the mask multiplied by the correct entry of dA) (≈1 line)
dA_prev[i, vert_start:vert_end, horiz_start:horiz_end, c] += np.multiply(mask, dA[i, h, w, c])
elif mode == "average":
# Get the value a from dA (≈1 line)
da = dA[i, h, w, c]
# Define the shape of the filter as fxf (≈1 line)
shape = (f, f)
# Distribute it to get the correct slice of dA_prev. i.e. Add the distributed value of da. (≈1 line)
dA_prev[i, vert_start:vert_end, horiz_start:horiz_end, c] += distribute_value(da, shape)
### END CODE ###
# Making sure your output shape is correct
assert(dA_prev.shape == A_prev.shape)
return dA_prev
测试:
np.random.seed(1)
A_prev = np.random.randn(5, 5, 3, 2)
hparameters = {"stride" : 1, "f": 2}
A, cache = pool_forward(A_prev, hparameters)
dA = np.random.randn(5, 4, 2, 2)
dA_prev = pool_backward(dA, cache, mode = "max")
print("mode = max")
print('mean of dA = ', np.mean(dA))
print('dA_prev[1,1] = ', dA_prev[1,1])
print()
dA_prev = pool_backward(dA, cache, mode = "average")
print("mode = average")
print('mean of dA = ', np.mean(dA))
print('dA_prev[1,1] = ', dA_prev[1,1])
mode = max
mean of dA = 0.14571390272918056
dA_prev[1,1] = [[ 0. 0. ]
[ 5.05844394 -1.68282702]
[ 0. 0. ]]
mode = average
mean of dA = 0.14571390272918056
dA_prev[1,1] = [[ 0.08485462 0.2787552 ]
[ 1.26461098 -0.25749373]
[ 1.17975636 -0.53624893]]
Convolutional Neural Network-week1编程题(一步步搭建CNN模型)的更多相关文章
- Relation-Shape Convolutional Neural Network for Point Cloud Analysis(CVPR 2019)
代码:https://github.com/Yochengliu/Relation-Shape-CNN 文章:https://arxiv.org/abs/1904.07601 作者直播:https:/ ...
- ISSCC 2017论文导读 Session 14 Deep Learning Processors,A 2.9TOPS/W Deep Convolutional Neural Network
最近ISSCC2017大会刚刚举行,看了关于Deep Learning处理器的Session 14,有一些不错的东西,在这里记录一下. A 2.9TOPS/W Deep Convolutional N ...
- ISSCC 2017论文导读 Session 14 Deep Learning Processors,A 2.9TOPS/W Deep Convolutional Neural Network SOC
最近ISSCC2017大会刚刚举行,看了关于Deep Learning处理器的Session 14,有一些不错的东西,在这里记录一下. A 2.9TOPS/W Deep Convolutional N ...
- 论文阅读(Weilin Huang——【TIP2016】Text-Attentional Convolutional Neural Network for Scene Text Detection)
Weilin Huang--[TIP2015]Text-Attentional Convolutional Neural Network for Scene Text Detection) 目录 作者 ...
- 卷积神经网络(Convolutional Neural Network,CNN)
全连接神经网络(Fully connected neural network)处理图像最大的问题在于全连接层的参数太多.参数增多除了导致计算速度减慢,还很容易导致过拟合问题.所以需要一个更合理的神经网 ...
- Convolutional Neural Network in TensorFlow
翻译自Build a Convolutional Neural Network using Estimators TensorFlow的layer模块提供了一个轻松构建神经网络的高端API,它提供了创 ...
- 卷积神经网络(Convolutional Neural Network, CNN)简析
目录 1 神经网络 2 卷积神经网络 2.1 局部感知 2.2 参数共享 2.3 多卷积核 2.4 Down-pooling 2.5 多层卷积 3 ImageNet-2010网络结构 4 DeepID ...
- HYPERSPECTRAL IMAGE CLASSIFICATION USING TWOCHANNEL DEEP CONVOLUTIONAL NEURAL NETWORK阅读笔记
HYPERSPECTRAL IMAGE CLASSIFICATION USING TWOCHANNEL DEEP CONVOLUTIONAL NEURAL NETWORK 论文地址:https:/ ...
- A NEW HYPERSPECTRAL BAND SELECTION APPROACH BASED ON CONVOLUTIONAL NEURAL NETWORK文章笔记
A NEW HYPERSPECTRAL BAND SELECTION APPROACH BASED ON CONVOLUTIONAL NEURAL NETWORK 文章地址:https://ieeex ...
随机推荐
- Python3实现打格点算法的GPU加速
技术背景 在数学和物理学领域,总是充满了各种连续的函数模型.而当我们用现代计算机的技术去处理这些问题的时候,事实上是无法直接处理连续模型的,绝大多数的情况下都要转化成一个离散的模型再进行数值的计算.比 ...
- (九)羽夏看C语言——C++番外篇
写在前面 此系列是本人一个字一个字码出来的,包括示例和实验截图.本人非计算机专业,可能对本教程涉及的事物没有了解的足够深入,如有错误,欢迎批评指正. 如有好的建议,欢迎反馈.码字不易,如果本篇文章 ...
- HCNP Routing&Switching之IS-IS报文结构和类型
前文我们了解了IS-IS动态路由协议基础相关话题,回顾请参考https://www.cnblogs.com/qiuhom-1874/p/15249328.html:今天我们来聊一聊IS-IS动态路由协 ...
- Redis集群的搭建及与SpringBoot的整合
1.概述 之前聊了Redis的哨兵模式,哨兵模式解决了读的并发问题,也解决了Master节点单点的问题. 但随着系统越来越庞大,缓存的数据越来越多,服务器的内存容量又成了问题,需要水平扩容,此时哨兵模 ...
- JS007. 深入探讨带浮点数运算丢失精度问题(二进制的浮点数存储方式)
复现与概述 当JS在进行浮点数运算时可能产生丢失精度的情况: 从肉眼可见的程度上观察,发生精度丢失的浮点数是没有规律的,但该浮点数丢失精度的问题会100%复现.经查阅,这个问题要追溯至浮点数的二进制存 ...
- (5)java Spring Cloud+Spring boot+mybatis企业快速开发架构之SpringCloud-Spring Boot简介
Spring Boot 是由 Pivotal 团队提供的全新框架,其设计目的是简化新 Spring 应用的初始搭建以及开发过程.该框架使用了特定的方式进行配置,从而使开发人员不再需要定义样板化的配置 ...
- MySQL查询结果集字符串操作之多行合并与单行分割
前言 我们在做项目写sql语句的时候,是否会遇到这样的场景,就是需要把查询出来的多列,按照字符串分割合并成一列显示,或者把存在数据库里面用逗号分隔的一列,查询分成多列呢,常见场景有,文章标签,需要吧查 ...
- ClickOnce手动更新
if (ApplicationDeployment.IsNetworkDeployed == true) { ApplicationDeploy ...
- node实战小例子
第一章 2020-2-6 留言小本子 思路(由于本章没有数据库,客户提交的数据放在全局变量,接收请求用的是bodyParser, padyParser使用方法 app.use(bodyParser.u ...
- Dapr实战(三)状态管理
状态管理解决了什么 分布式应用程序中的状态可能很有挑战性. 例如: 应用程序可能需要不同类型的数据存储. 访问和更新数据可能需要不同的一致性级别. 多个用户可以同时更新数据,这需要解决冲突. 服务必须 ...