用STM32定时器中断产生PWM控制步进电机
控制步进电机可以使用PWM、定时器中断、延时,这里用的就是定时器中断来让它转动。
一、硬件部分
1.使用的硬件
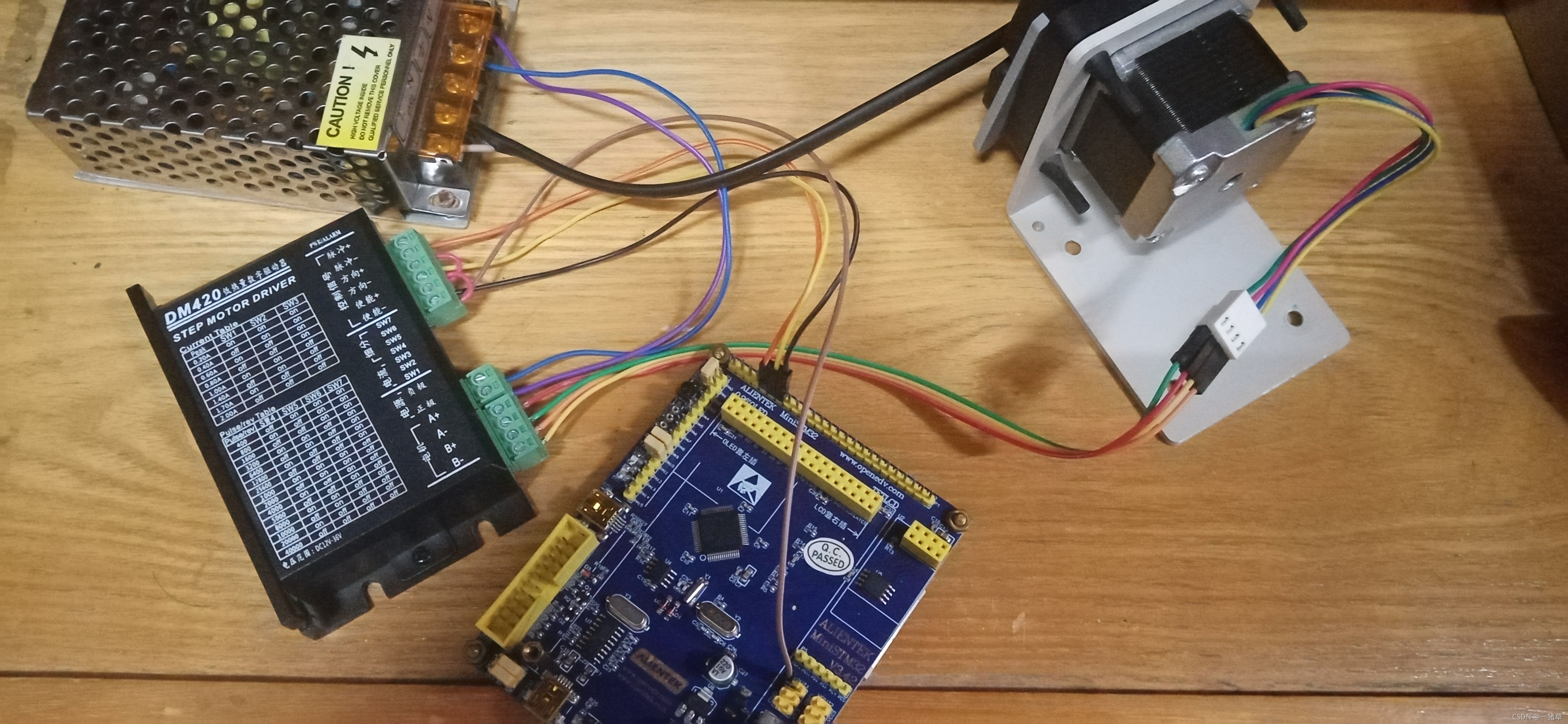
板子用的是正点原子的STM32F103 mini板,驱动器是DM420(DM420驱动器资料),用开关电源供电,电机就是普通的42步进电机,步距角为1.8°,虽然按照图片来看它是个蠕动泵。如下图
2.硬件连接
PUL+——PB0,脉冲输入
DIR+——PB1,方向使能
ENA+——PB2,脱机使能,共阴极接法的话,输入低电平,让它无效。
这里连接驱动器采用共阴极接法,如图
3.总硬件连接图
二、控制步进电机转动
想让它转,简单的说就是高电平,低电平循环输入,产生脉冲,让它转动。
其转速与产生脉冲频率有关:
arr:自动重装载寄存器的值
psc:定时器频率
α为步距角(1.8°),x为驱动器细分倍数(设置为2,也就是说转动一圈需要400个脉冲,每个脉冲转动0.9度)
脉冲频率 = Fck_int(72MHZ) / ((arr+1)*(psc+1))
转速(r/min)= 脉冲频率 * 60 / ((360/α)*x)
假如我将arr设置为10-1,psc设置为7200-1,则脉冲频率为100Hz,转速为15r/min.
三、电机驱动代码
1.GPIO.h
#ifndef __GPIO_H
#define __GPIO_H
#include "sys.h" #define LED0 PAout(8) // PA8,测试是否进入中断 #define PUL PBout(0) //脉冲输出
#define DIR PBout(1) //方向使能
#define ENA PBout(2) //脱机使能 void GPIO_Init(void);//端口初始化 #endif
2.timer.c
#include "timer.h"
#include "led.h" void TIM3_Int_Init(u16 arr,u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure; RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //时钟使能 TIM_TimeBaseStructure.TIM_Period = arr;
TIM_TimeBaseStructure.TIM_Prescaler =psc;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //初始化TIMx的时间基数单位 TIM_ITConfig(TIM3,TIM_IT_Update ,ENABLE);
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //TIM3中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //先占优先级0级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级3级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能
NVIC_Init(&NVIC_InitStructure); //初始化外设NVIC寄存器 TIM_Cmd(TIM3, ENABLE); //使能TIMx外设 } void TIM3_IRQHandler(void)
{
if(TIM_GetITStatus(TIM3,TIM_IT_Update)!=RESET)//是否发生中断
{
PUL = !PUL;
LED0 = !LED0;
}
TIM_ClearITPendingBit(TIM3,TIM_IT_Update); //清除TIMx的中断待处理位:TIM 中断源
}
3.main.c
#include "GPIO.h"
#include "delay.h"
#include "sys.h"
#include "timer.h" int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);// 设置中断优先级分组2
GPIO_Init(); //初始化连接的硬件接口
ENA = 0; //脱机使能失效
TIM3_Int_Init(99,7199);//72MHz / ((99+1)*(7199+1)) =100Hz while(1)
{
;
}
}
如果想要完整代码,可以下方评论区留下邮箱,我看到就会发。
用STM32定时器中断产生PWM控制步进电机的更多相关文章
- 合宙AIR105(三): 定时器, 定时器中断和PWM输出
目录 合宙AIR105(一): Keil MDK开发环境, DAP-Link 烧录和调试 合宙AIR105(二): 时钟设置和延迟函数 合宙AIR105(三): 定时器, 定时器中断和PWM输出 Ai ...
- stm32定时器学习二——PWM设置
/* STM32 嵌入式学习入门(5)——PWM的实现 上一篇博文介绍了定时器和PWM的基本的原理,本篇博文从代码层面来介绍PWM的具体实现.同样,还是以博主所用的开发板——正点原子开发板STM32F ...
- (stm32f103学习总结)—stm32定时器中断
一.定时器介绍 STM32F1的定时器非常多,由2个基本定时器(TIM6.TIM7).4个通 用定时器(TIM2-TIM5)和2个高级定时器(TIM1.TIM8)组成.基本定 时器的功能最为简单,类似 ...
- stm32定时器中断类型分析
一直在用的stm32定时器的中断都是TIM_IT_Update更新中断,也没问为什么,直到碰到有人使用TIM_IT_CC1中断,才想到这定时器的中断类型究竟有什么区别,都怪当时学习stm32的时候不够 ...
- AVR单片机教程——定时器中断
本文隶属于AVR单片机教程系列. 中断,是单片机的精华. 中断基础 当一个事件发生时,CPU会停止当前执行的代码,转而处理这个事件,这就是一个中断.触发中断的事件成为中断源,处理事件的函数称为中断 ...
- STM32定时器输出PWM频率和步进电机控制速度计算
1.STM32F4系列定时器输出PWM频率计算 第一步,了解定时器的时钟多少: 我们知道AHP总线是168Mhz的频率,而APB1和APB2都是挂在AHP总线上的. (1)高级定时器timer1, t ...
- stm32控制步进电机加减速
实习公司项目需要控制步进电机,电机方面主要包括控制运动.加减速.限位.下面介绍一下在电机控制方面的心得,由于对于电机的控制不需要很精确,并且自身能力有限,相比于大牛有很大的差距. 1.需要实现的功能 ...
- STM32学习笔记——定时器中断(向原子哥学习)
定时器中断 STM32 的定时器功能十分强大,有 TIME1 和 TIME8 等高级定时器,也有 TIME2~TIME5 等通用定时器,还有 TIME6 和TIME7 等基本定时器.在本章中,我们将利 ...
- STM32串口控制步进电机(原创)
用的42步进电机: 厂家可能不一样,两项四线步进电机,里面有两个线圈.在电机什么电都没有接的情况下,用万用表测量四个管脚:两两短接(或者阻值很小)的为一组,可以分别接A+,a-剩余接B+,B-;顺序可 ...
随机推荐
- MapReduce原理深入理解(一)
1.MapReduce概念 1)MapReduce是一种分布式计算模型,由Google提出,主要用于搜索领域,解决海量数据的计算问题. 2)MapReduce是分布式运行的,由两个阶段组成:Map和R ...
- 鸿蒙内核源码分析(GN应用篇) | GN语法及在鸿蒙的使用 | 百篇博客分析OpenHarmony源码 | v60.01
百篇博客系列篇.本篇为: v60.xx 鸿蒙内核源码分析(gn应用篇) | gn语法及在鸿蒙的使用 | 51.c.h.o 编译构建相关篇为: v50.xx 鸿蒙内核源码分析(编译环境篇) | 编译鸿蒙 ...
- AT4353-[ARC101D]Robots and Exits【LIS】
正题 题目链接:https://www.luogu.com.cn/problem/AT4353 题目大意 数轴上有\(n\)个球\(m\)个洞,每次可以将所有球左移或者右移,球到洞的位置会掉下去. 求 ...
- VirtualBox VM 空间瘦身记(vmdk)
本文地址:https://www.ebpf.top/post/shrink_vbox_vmdk_size 在使用 VirtualBox( VMDK 模式)管理虚拟机的时候,我们经常会遇到一些编译安装场 ...
- DIVIDEMIX: LEARNING WITH NOISY LABELS AS SEMI-SUPERVISED LEARNING
论文阅读: DIVIDEMIX: LEARNING WITH NOISY LABELS AS SEMI-SUPERVISED LEARNING 作者说明 版权声明:本文为博主原创文章,遵循CC 4.0 ...
- 安装SpaCy出现报错:requests.exceptions.ConnectionError: HTTPSConnectionPool(host='raw.githubusercontent.com', port=443):
内含安装步骤及报错解决:https://www.cnblogs.com/xiaolan-Lin/p/13286885.html
- C#开发BIMFACE系列40 服务端API之模型集成
BIMFACE二次开发系列目录 [已更新最新开发文章,点击查看详细] 随着建筑信息化模型技术的发展,越来越多的人选择在云端浏览建筑模型.现阶段的云端模型浏览大多是基于文件级别,一次只可以浏览一 ...
- 洛谷 P1862 输油管道问题
题意 题目链接:P1862 输油管道问题 不难看出每个油井的 \(x\) 坐标是没用的,所以问题转化为如下. 代数意义:给出 \(n\) 个数 \(y_1,y_2,\ldots,y_n\),找一个数 ...
- react之四种组件中DOM样式设置方式
1.行内样式 想给虚拟dom添加行内样式,需要使用表达式传入样式对象的方式来实现 行内样式需要写入一个样式对象,而这个样式对象的位置可以放在很多地方 例如:render函数里.组件原型上.外链js文件 ...
- golang []byte和string的高性能转换
golang []byte和string的高性能转换 在fasthttp的最佳实践中有这么一句话: Avoid conversion between []byte and string, since ...