路径规划 Adjacency matrix 传球问题
建模
问题是什么
知道了问题是什么答案就ok了
重复考虑 与 重复计算
程序可以重复考虑 但往目标篮子中放入时,放不放把握好就ok了。
集合
交集
并集
w
路径规划
字符串处理
42423
42424
42432
42434
43123
43124
43132
43134
43142
43143
43212
43213
43214
43232
43234
43242
43243
43412
43413
43414
43423
43424
43432
43434
183well@well:/home/etc/project$ cat w.php
<?php
$wx = 0;
$pass = array(11,22,33,44,5,6,7,8,9,0);
for($w=11111;$w<44445;$w++){
$w.='';
if(substr($w,0,1)!=1 && substr($w,strlen($w)-1,1)!=1)
{ $flag=0;
foreach($pass as $val){
$val .='';
if(strpos($w,$val)!==false)$flag = 1;
}
if($flag == 0){echo $w,"\n";$wx++;}
}
$w += 1-1;
}
echo $wx; die();

https://en.wikipedia.org/wiki/Adjacency_matrix

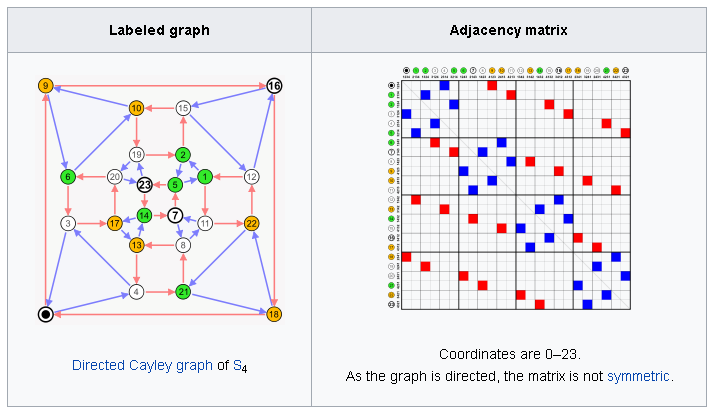
Undirected Graphs
The convention followed here (for undirected graphs) is that each edge adds 1 to the appropriate cell in the matrix, and each loop adds 2. This allows the degree of a vertex to be easily found by taking the sum of the values in either its respective row or column in the adjacency matrix.
Directed Graphs
In directed graphs, the in-degree of a vertex can be computed by summing the entries of the corresponding row, and the out-degree can be computed by summing the entries of the corresponding column.


w
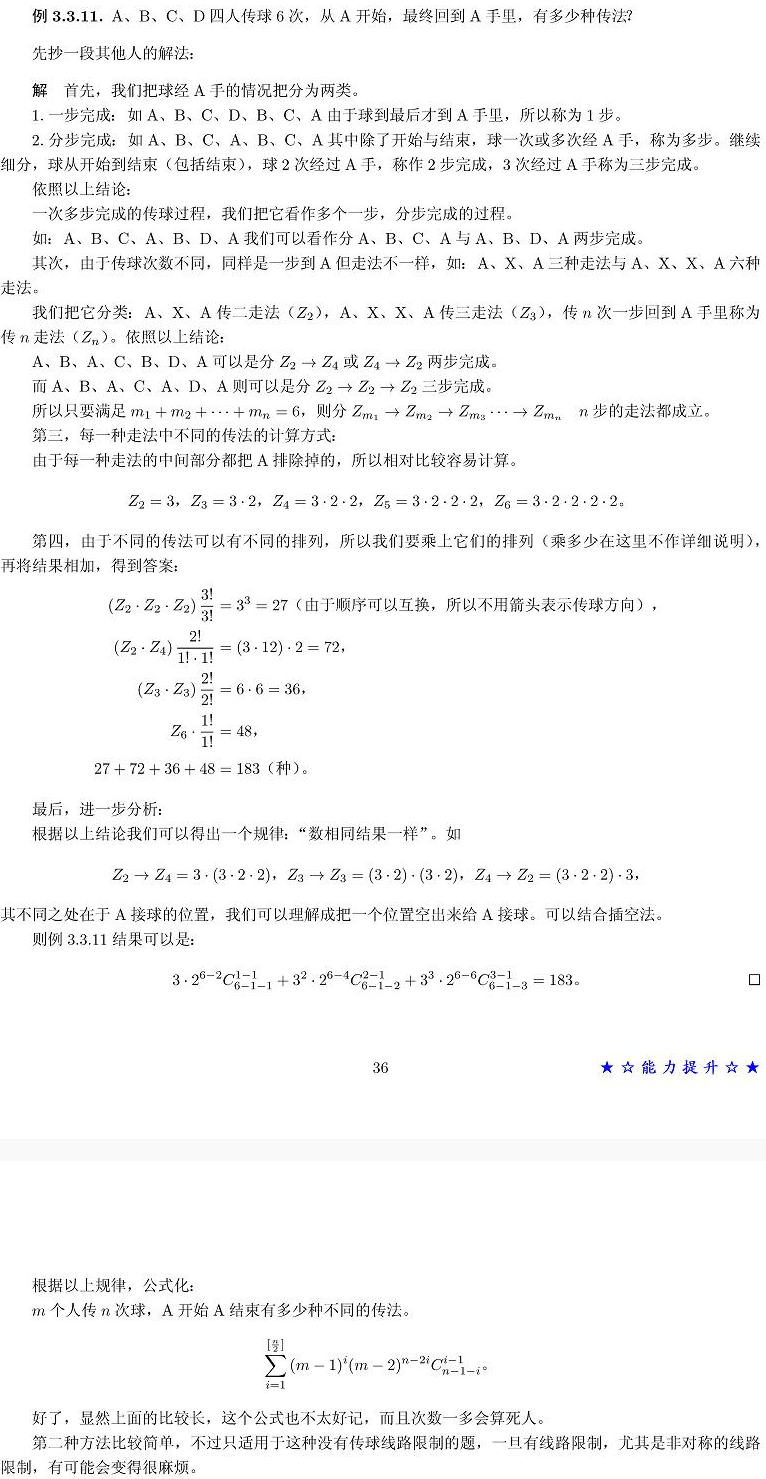
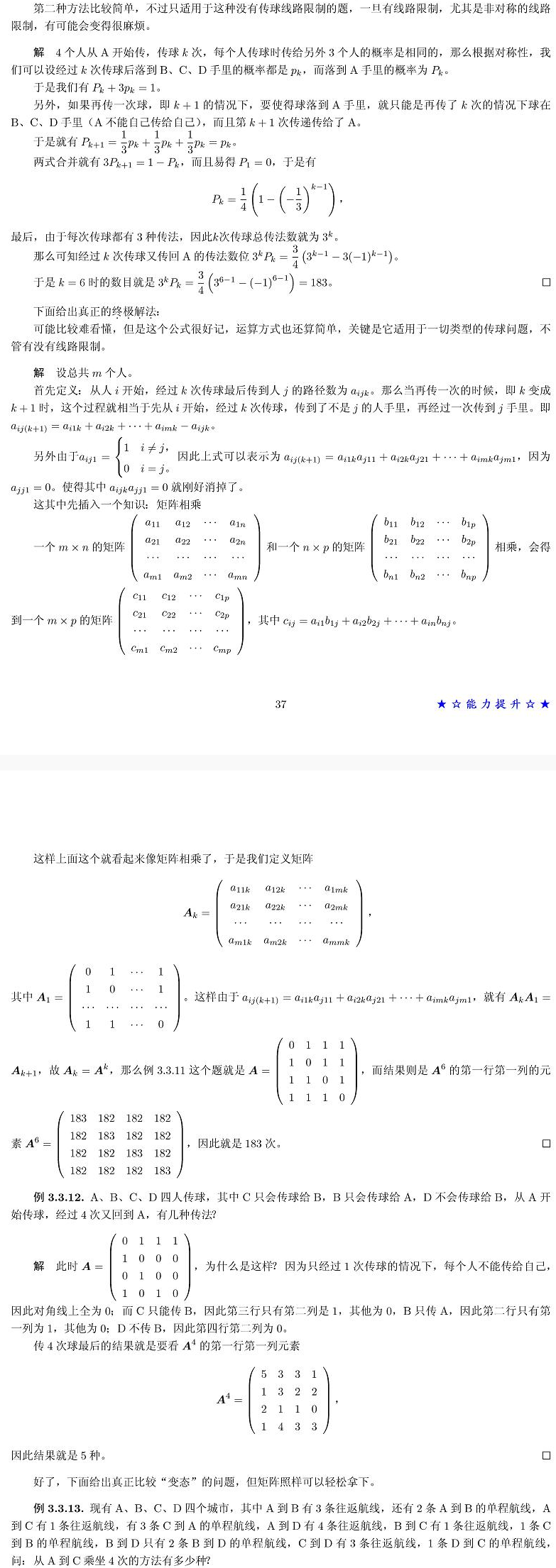
传球问题的终极解法 吴炜超
http://old.pep.com.cn/rjwk/gzsxsxkj/2011/sxkj4/sxkj4ts/201106/t20110623_1050797.htm
路径规划 Adjacency matrix 传球问题的更多相关文章
- V-rep学习笔记:机器人路径规划2
路径规划问题是机器人学研究的一个重要领域,它是指给定操作环境以及起始和目标的位置姿态,要求选择一条从起始点到目标点的路径,使运动物体(移动机器人或机械臂)能安全.无碰撞地通过所有的障碍物而达到目标位置 ...
- PRM路径规划算法
路径规划作为机器人完成各种任务的基础,一直是研究的热点.研究人员提出了许多规划方法:如人工势场法.单元分解法.随机路标图(PRM)法.快速搜索树(RRT)法等.传统的人工势场.单元分解法需要对空间中的 ...
- 【BZOJ-3627】路径规划 分层图 + Dijkstra + spfa
3627: [JLOI2014]路径规划 Time Limit: 30 Sec Memory Limit: 128 MBSubmit: 186 Solved: 70[Submit][Status] ...
- 基于谷歌地图的Dijkstra算法水路路径规划
最终效果图如下: 还是图.邻接表,可以模拟出几个对象=>节点.边.路径.三个类分别如下: Node 节点: using System; using System.Collections.Gene ...
- Unity路径规划
Unity路径规划 转自:http://www.cnblogs.com/zsb517/p/4090629.html 背景 酷跑游戏中涉及到弯道.不规则道路. 找来一些酷跑游戏的案例来看,很多都是只有 ...
- iOS百度地图路径规划和POI检索详细总结-b
路径规划.png 百度地图的使用 百度地图API的导入网上说了许多坑,不过我遇到的比较少,这里就放两个比较常见的吧.坑一: 奥联WIFI_xcodeproj.png 如上图所示,在infoplist里 ...
- COJ 0500 杨老师的路径规划(MST)最小生成树
杨老师的路径规划(MST) 难度级别:B: 运行时间限制:1000ms: 运行空间限制:51200KB: 代码长度限制:2000000B 试题描述 为满足同学们需求,杨老师在实验楼4层新建了好多个计算 ...
- octomap中3d-rrt路径规划
路径规划 碰撞冲突检测 在octomap中制定起止点,目标点,使用rrt规划一条路径出来,没有运动学,动力学的限制,只要能避开障碍物. 效果如下: #include "ros/ros.h&q ...
- ROS(indigo)RRT路径规划
源码地址:https://github.com/nalin1096/path_planning 路径规划 使用ROS实现了基于RRT路径规划算法. 发行版 - indigo 算法在有一个障碍的环境找到 ...
随机推荐
- [C++设计模式] command 命令模式
在软件系统中,"行为请求者"与"行为实现者"通常呈现一种"紧耦合". 但在某些场合,比方要对行为进行"记录.撤销/重做.事务&qu ...
- Android 必知必会 - 依据包名推断 App 执行状态
假设移动端訪问不佳,请訪问: 掘金版 Github 版 获取指定包名的 APP 是否还在后台执行,推断 APP 是否存活. 背景 能够依据 App 是否有 Service 分两类情况处理: 没有 Se ...
- mysql的innodb数据库引擎详解
http://www.jb51.net/softjc/158474.html 这篇文章主要介绍了mysql的innodb数据库引擎,需要的朋友可以参考下 一.mysql体系结构和存储引擎 1. ...
- Yii2.0 下的 load() 方法的使用
一 问题 最近在使用 Yii2.0,遇到一个 bug:在 /models/OrderDetail.php add() 方法中调用 load() 方法加载数据,却加载不了. public functio ...
- web 图片上传实现本地预览
在说上传之前先说说如何替换or美化浏览器自带的简陋上传按钮(自定义自己的上传按钮 如:img): 1.将自定义上传按钮上方添加 input file 框,实现input实现透明处理. 2.对自定义上传 ...
- unity, 集成iOS广告sdk注意事项
----更新:2015-10-22 今天在unity里集成讯飞语音听写的iOS sdk,结果发现前面集成domob广告的方法搞复杂了. 其实,直接把UnityViewControllerBase当做s ...
- Notes from Data Guard
There are two types of Standby databases: 1, Physical standby database block-for-block basis the phy ...
- 基于RocketIO的高速串行协议设计与实现
随着对信息流量需求的不断增长, 传统并行接口技术成为进一步提高数据传输速率的瓶颈.过去主要用于光纤通信的串行通信技术—SERDES正在取代传统并行总线而成为高速接口技术的主流.SERDES 是串行器) ...
- C语言中fgetc函数返回值为什么是int?
学习C语言的,文件操作,大都会用到它. 它的函数原型: 这个函数的返回值,是返回读取的一个字节.如果读到文件末尾返回EOF.EOF其实就是一个宏#define EOF (-1)表示-1.既然返回的是一 ...
- 使用nmap 验证多种漏洞
0x00 前言 大家都知道在平时的漏扫中,AWVS.APPSCAN.Netspark.webspectort等漏扫工具扫描出来的漏洞问题往往存在误报,这时我们就需要进行人工手动验证漏洞,这里我们有两种 ...