路径规划 Adjacency matrix 传球问题
建模
问题是什么
知道了问题是什么答案就ok了
重复考虑 与 重复计算
程序可以重复考虑 但往目标篮子中放入时,放不放把握好就ok了。
集合
交集
并集
w
路径规划
字符串处理
42423
42424
42432
42434
43123
43124
43132
43134
43142
43143
43212
43213
43214
43232
43234
43242
43243
43412
43413
43414
43423
43424
43432
43434
183well@well:/home/etc/project$ cat w.php
<?php
$wx = 0;
$pass = array(11,22,33,44,5,6,7,8,9,0);
for($w=11111;$w<44445;$w++){
$w.='';
if(substr($w,0,1)!=1 && substr($w,strlen($w)-1,1)!=1)
{ $flag=0;
foreach($pass as $val){
$val .='';
if(strpos($w,$val)!==false)$flag = 1;
}
if($flag == 0){echo $w,"\n";$wx++;}
}
$w += 1-1;
}
echo $wx; die();

https://en.wikipedia.org/wiki/Adjacency_matrix

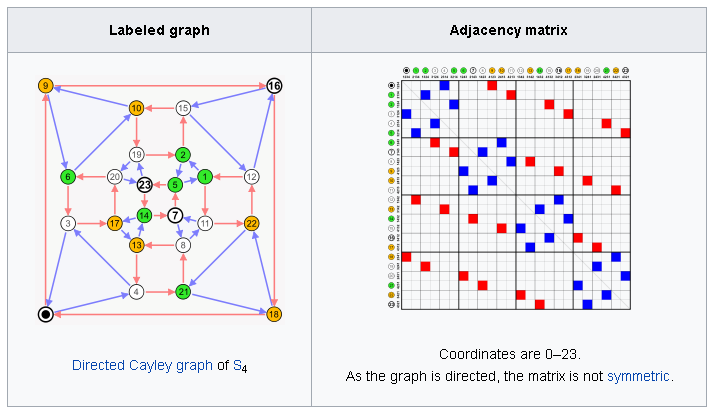
Undirected Graphs
The convention followed here (for undirected graphs) is that each edge adds 1 to the appropriate cell in the matrix, and each loop adds 2. This allows the degree of a vertex to be easily found by taking the sum of the values in either its respective row or column in the adjacency matrix.
Directed Graphs
In directed graphs, the in-degree of a vertex can be computed by summing the entries of the corresponding row, and the out-degree can be computed by summing the entries of the corresponding column.


w
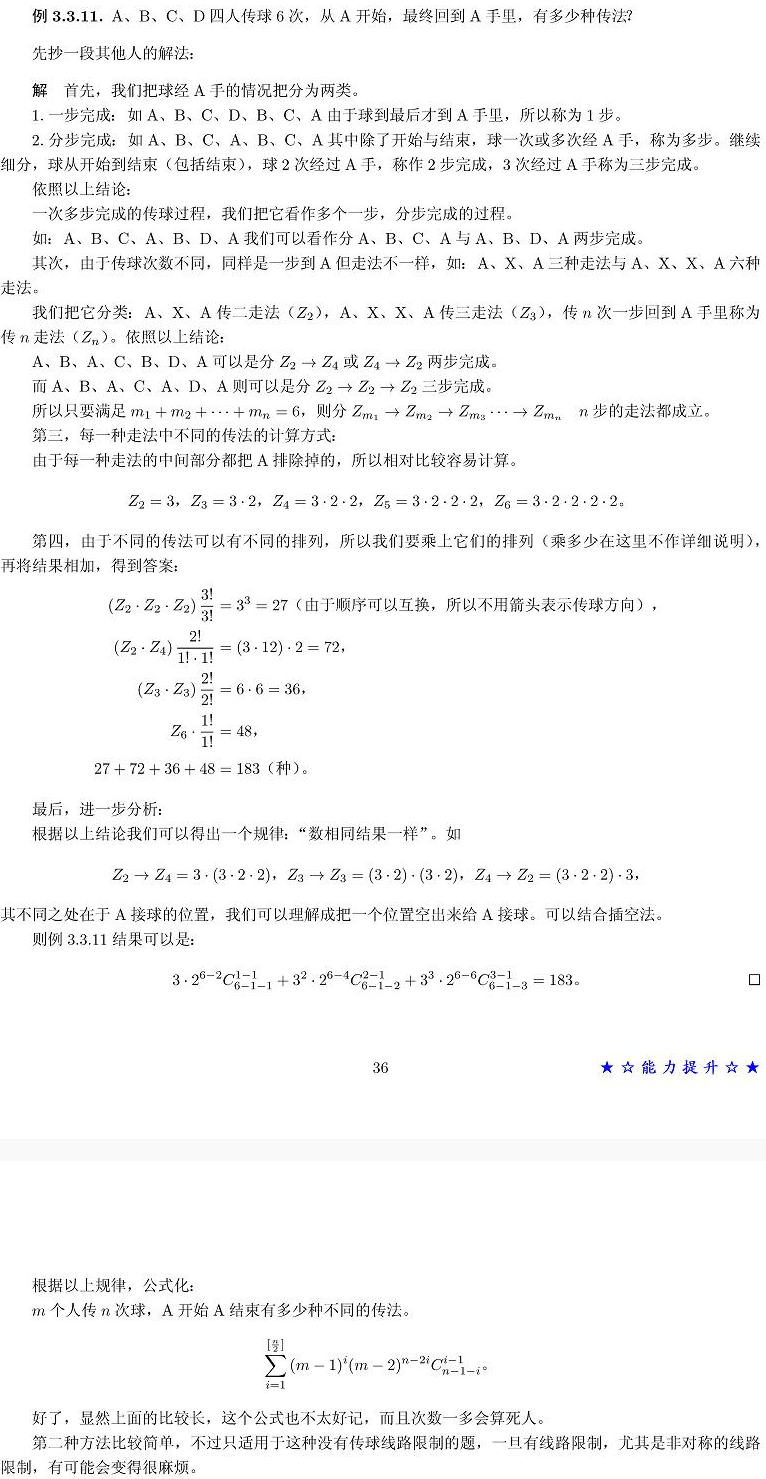
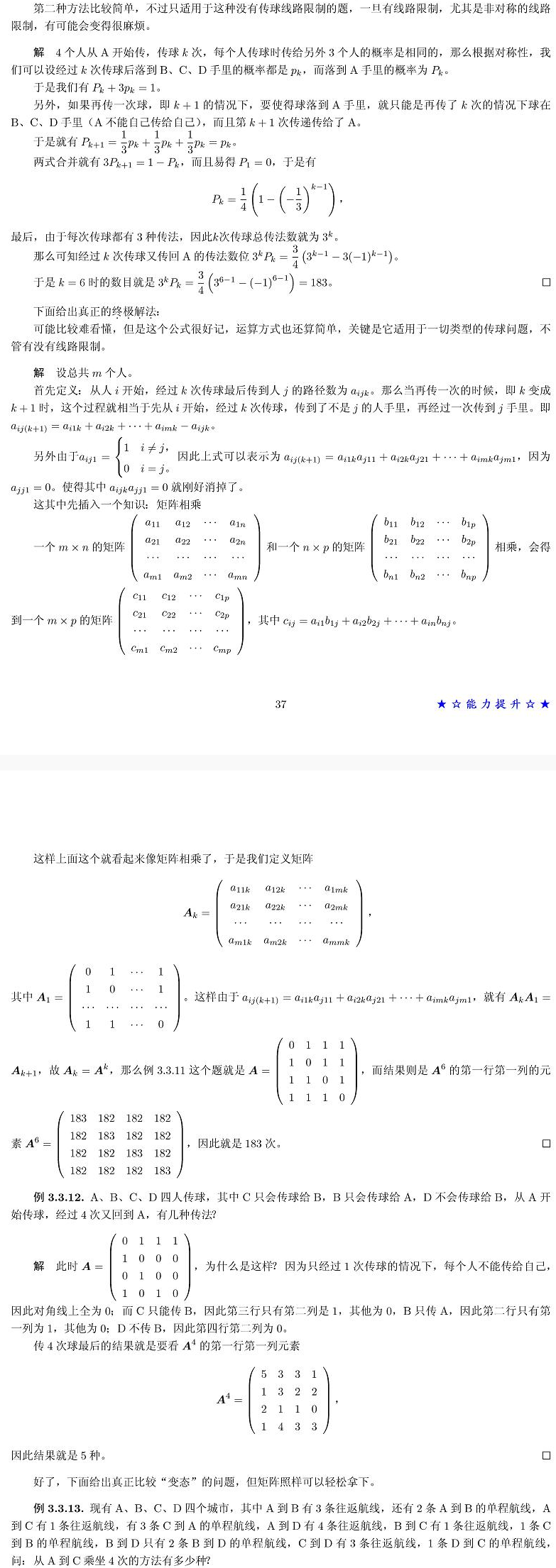
传球问题的终极解法 吴炜超
http://old.pep.com.cn/rjwk/gzsxsxkj/2011/sxkj4/sxkj4ts/201106/t20110623_1050797.htm
路径规划 Adjacency matrix 传球问题的更多相关文章
- V-rep学习笔记:机器人路径规划2
路径规划问题是机器人学研究的一个重要领域,它是指给定操作环境以及起始和目标的位置姿态,要求选择一条从起始点到目标点的路径,使运动物体(移动机器人或机械臂)能安全.无碰撞地通过所有的障碍物而达到目标位置 ...
- PRM路径规划算法
路径规划作为机器人完成各种任务的基础,一直是研究的热点.研究人员提出了许多规划方法:如人工势场法.单元分解法.随机路标图(PRM)法.快速搜索树(RRT)法等.传统的人工势场.单元分解法需要对空间中的 ...
- 【BZOJ-3627】路径规划 分层图 + Dijkstra + spfa
3627: [JLOI2014]路径规划 Time Limit: 30 Sec Memory Limit: 128 MBSubmit: 186 Solved: 70[Submit][Status] ...
- 基于谷歌地图的Dijkstra算法水路路径规划
最终效果图如下: 还是图.邻接表,可以模拟出几个对象=>节点.边.路径.三个类分别如下: Node 节点: using System; using System.Collections.Gene ...
- Unity路径规划
Unity路径规划 转自:http://www.cnblogs.com/zsb517/p/4090629.html 背景 酷跑游戏中涉及到弯道.不规则道路. 找来一些酷跑游戏的案例来看,很多都是只有 ...
- iOS百度地图路径规划和POI检索详细总结-b
路径规划.png 百度地图的使用 百度地图API的导入网上说了许多坑,不过我遇到的比较少,这里就放两个比较常见的吧.坑一: 奥联WIFI_xcodeproj.png 如上图所示,在infoplist里 ...
- COJ 0500 杨老师的路径规划(MST)最小生成树
杨老师的路径规划(MST) 难度级别:B: 运行时间限制:1000ms: 运行空间限制:51200KB: 代码长度限制:2000000B 试题描述 为满足同学们需求,杨老师在实验楼4层新建了好多个计算 ...
- octomap中3d-rrt路径规划
路径规划 碰撞冲突检测 在octomap中制定起止点,目标点,使用rrt规划一条路径出来,没有运动学,动力学的限制,只要能避开障碍物. 效果如下: #include "ros/ros.h&q ...
- ROS(indigo)RRT路径规划
源码地址:https://github.com/nalin1096/path_planning 路径规划 使用ROS实现了基于RRT路径规划算法. 发行版 - indigo 算法在有一个障碍的环境找到 ...
随机推荐
- 【Python3 爬虫】04_urllib.request.urlretrieve
urllib模块提供的urlretrieve()函数,urlretrieve()方法直接将远程的数据下载到本地 urllib语法 参数url:传入的网址,网址必须得是个字符串 参数filename:指 ...
- 安装Drupal7.12+Postgresql9.1(Ubuntu Server 12.04)
怀揣着为中小企业量身定做一整套开源软件解决方案的梦想开始了一个网站的搭建.http://osssme.org/ OS环境准备 这次是从OS开始安装的.最开始装Ubuntu12.04这里就不再赘述, 唯 ...
- 【MyBatis学习10】高级映射之多对多查询
本文来总结一下mybatis中的多对多映射,从第8节的文章中可以看出,用户表和商品表示多对多关系,它们两的多对多是通过订单项和订单明细这两张表所关联起来的,那么这一节主要来总结一下用户表和商品表之间的 ...
- 8.1.2 绑定Activity和Service
8.1.2 绑定Activity和Service 2010-06-21 16:57 李宁 中国水利水电出版社 字号:T | T <Android/OPhone开发完全讲义>第8章Andro ...
- SpringCloud系列十三:Feign对继承、压缩、日志的支持以及构造多参数请求
1. 回顾 上文讲解了手动创建Feign,比默认的使用更加灵活. 本文将讲解Feign对继承.压缩的支持以及日志和多参数请求的构造等. 2. Feign对继承的支持 Feign支持继承.使用继承,可将 ...
- 项目实践中--Git服务器的搭建与使用指南
一.前言 Git是一款免费.开源的分布式版本控制系统,用以有效.高速的处理从很小到非常大的项目版本管理.在平时的项目开发中,我们会使用到Git来进行版本控制. Git的功能特性: 从一般开发者的角度来 ...
- CONFIG_*头文件的配置
通常在kernel或uboot中, 有很多以CONFIG_*开头的宏配置选项,并且保存在相应的头文件中,那么这些CONFIG_*是怎么生成的呢? 在uboot的顶层Makefile中,有这么一项: 此 ...
- 23:LVS客户端配置脚本案例
[root@web03 scripts]# cat prevent_arp.sh #!/bin/bash lo_ip=$(ip a s lo|grep "10.0.0.1[3]/32&quo ...
- Sublime 正则 替换方法
- caffe net 可视化工具,,层特征可视化
1.只用网络在线结构绘制可视化网络模型 http://ethereon.github.io/netscope/#/editor 将对应的网络输入到里面,然后按shift+enter即可查看对应的网络结 ...